舰载机弹射起飞上升段控制律研究
2012-08-27甄子洋王新华
朱 熠, 江 驹, 甄子洋, 王新华, 焦 鑫
(南京航空航天大学自动化学院,南京 210016)
0 引言
弹射起飞技术是近年来航母上所广泛采用的一种舰载机的起飞方式,通过蒸汽或者电磁弹射器所产生的牵引力,使舰载机在舰面滑跑时短距加速,迅速达到离舰速度。相对于滑跃起飞及垂直/短距起飞等其他舰载机起飞方式,弹射起飞具有滑跑距离短、起飞能力强、效率高等优点。弹射起飞也有其自身的难题,弹射器的制造技术复杂,比如前起落架需要特制,一般将增重100~300 kg。国外对弹射起飞的研究已经相当成熟,不过由于保密原因,真正公开的很少。
国内从20世纪90年代开始已经有许多相关文章出现,以弹射起飞的安全性和可行性为核心展开研究,较典型的有地效丧失、飞机的洗流场发生改变[1]所引起的过舰首下沉问题;离舰时前起落架突伸作用[2]以及它所带来的附加问题;各种因素对飞机安全的影响,如舰首气流[3]、甲板运动[4-5]等。这些文献中对于舰面滑跑阶段,一般侧重于各初始参数取值范围的研究[6],也有采用张量式模型[7]进行研究的;对于上升段的控制,一般侧重于舵面调节的优化规律[8-9]。
与以往研究工作集中于采用前馈式控制的思路不同,本文假设在加速滑跑的末期,飞机已经受到过舰首下沉等不利因素的影响,具有了一定的下滑趋势。并以加速阶段的末速度为初始条件,进行上升段的轨迹控制,通过控制律改变上升段初始时刻不利的下滑趋势。在仿真中还研究了阵风干扰对飞机的影响,分析了姿态控制律下,飞机抗阵风扰动的特性。
1 弹射起飞原理及工作流程
弹射起飞技术的核心是弹射装置,迄今为止曾研究发展过很多不同种类的弹射装置,其中应用最为广泛的是蒸汽弹射器。然而,在美国新一代的航母上,电磁飞机弹射系统(EMALS)将会作为新一代的弹射器出现[10]。
以蒸汽弹射器为例,图1为蒸汽弹射示意图,图中:1为起飞甲板;2为拖拽固定杆;3为牵引加速杆;4为滑块总成;5为弹射阀总成;6为开槽气缸;7为活塞总成;8为水刹;9为复位装置;10为储气罐。

图1 蒸汽弹射示意图Fig.1 The sketch map of steam catapult assisted take-off
蒸汽弹射器从本质上讲可以认为就是一种活塞行程较长的往复式蒸汽机[11]。弹射的过程可以简要总结为:弹射起飞前,甲板人员将飞机与往复车相连,并使用牵制杆把飞机上的牵制钩固定于弹射器的往复车上。然后,操作人员打开发射阀,高温蒸汽从储气罐经发射阀流入气缸,克服各种阻力使活塞向前运动。通过活塞与飞机之间的驱动组件,飞机将与活塞同步运动,动力冲程完成时飞机获得规定的末速度并顺利与弹射小车脱开,起飞离舰。水刹装置吸收活塞末动能,排气阀打开,复位机构将活塞等组件拖回原位。
2 弹射起飞上升段数学模型
2.1 舰载机模型
当舰载机弹射起飞成功之后,处在稳步上升的阶段。根据此时舰载机的飞行特点,本文选取的是舰载机纵向小扰动线性化方程。选取英美坐标体系,单位全部使用国际单位制。将飞机的运动建立在稳定轴系OXSYSZS上,具有如下初始基准:空速在ZS0中的投影W0=0;初始角α0≈W0/U0=0;初始俯仰角θ0与航迹角γ0相等。
选取状态变量矩阵为X=[Δu Δα Δq Δθ]T,输入变量矩阵为 U=[ΔδeΔT]T,Δu、Δα、Δq、Δθ,Δδe、ΔT分别为飞机水平速度、迎角、俯仰角度角、俯仰角、升降舵偏转角、油门开度的变化量,则飞机的纵向小扰动线性化状态方程为

式中:A为飞机状态矩阵;B为控制矩阵。
2.2 阵风扰动模型
影响舰载机起飞安全的因素很多,在海面上各种风的干扰中,阵风扰动是其中典型的一种。峰值过后,持续时间不长,是阵风的特点。在仿真时阵风扰动将分别从前向和垂向两个方向加入,分别分析其对航迹角和高度变化影响,阵风扰动模型为

上述模型中,将阵风近似为形如三角函数正半轴上波形的形状,幅值为1,持续大约5~6 s的时间。
3 上升段初始条件与控制律设计
3.1 上升段飞机初始条件的确定
与滑跃起飞可以优化设计斜甲板参数[12]不同,弹射起飞的过程中弹射的滑距由于受到航母甲板长度的限制(一般在70~80 m左右),滑距的增加对起飞速度的改善并不十分明显,故弹射起飞的速度主要由弹射器的功率和飞机发动机推力保证。另一方面,为了避免离舰时升力不够落入海中,在弹射准备的过程中都会预置升降舵的偏转角,使得弹射过程中迎角增大以增加升力。前起落架突伸作用也会增大迎角,但是如果迎角变化过大同样会影响飞机的动态特性[1]。
综上可知,飞机即使起飞离舰,还是可能在离舰后出现迎角较大并开始下沉的不利情况,本例仿真中就选取这样不利的情况,此时飞机具有一定的迎角(迎角8.3°)并且飞行轨迹有下滑趋势(航迹角 -3°)。这样的初始状态下,需要迅速加入姿态控制,在飞机的下沉量超过3 m之前将飞机的姿态改成爬升的状态。
3.2 姿态控制律的设计方法
由于飞机一开始的航迹角为负,首先增加发动机推力,同时通过调节升降舵改变飞机俯仰角,并使得航迹角快速跟随俯仰角的变化,从而改变飞机的航迹。故引入姿态角中的短周期变量,俯仰角及其微分量作为反馈,构成二级控制回路,即纵向的俯仰姿态控制回路。将舵回路的传递函数简化为Kδ,外回路构成比例式控制律

式中:K1为垂直陀螺的增益系数;Δθ为当前实际的俯仰角;Δθg为期望的俯仰角。若令 Lθ=KδK1,则有

式(4)与垂直陀螺和舵回路构成了比例式控制律的姿态角控制器。如果舰载机存在常值干扰力矩Mf,舰载机稳定后系统将出现一个Δδe用于抵消常值干扰力矩Mf的影响,其力矩平衡条件为

式中:M(Δδe)=QScACmδeΔδe,Q 为自由流动压,S 为机翼面积,cA为翼平均几何弦长,Cmδe为升降舵引起的气动力矩导数。通过增大反馈增益Lθ可以减小俯仰角的静差,但是,过大的反馈增益Lθ会导致升降舵Δδe过大,容易引发振荡。为了克服这一问题,在控制律中引入内回路俯仰角速率反馈,增加舰载机振荡运动的阻尼,则整体的控制律变为

4 仿真结果分析
4.1 姿态控制律效果分析
仿真曲线从弹射行程终点之后开始,弹射器模块在仿真模型中保留,控制的重点放在姿态控制器的设计上。图2为仿真模型的结构示意图。

图2 系统仿真模型结构Fig.2 Structure of the system in simulation
代入某型舰载机的参数,在不加任何控制及油门的情况下,飞机将以接近匀速下沉,本例中12 s内,飞机将坠入海中。采用第3节所述的方法,设计姿态控制系统,求出本舰载机在升降舵控制下的飞机短周期传递函数,图3为姿态控制器的结构图。

图3 姿态控制系统结构图Fig.3 Sketch of attitude control system
利用根轨迹法,通过阻尼回路和姿态回路两步分别确定内环控制参数Kθ·和外环控制参数Kθ。根据软件Matlab中的rltool命令,调出SISO工具箱,作出阻尼回路(内回路)根轨迹并调节参数。当ξ=0.707时,选取对应值,求出此时内回路的传递函数。同样的方法作姿态回路(外回路)的根轨迹取 ξ′=0.418,Kθ=8.263。然后,进一步进行手动调参,选取了第2组控制参数为
对比两组参数的控制效果。图4是两组参数下航迹角γ的变化曲线,图中的k指的是。两组曲线中,快速性和稳定性都满足了要求,姿态跟随特性良好。第2组参数下变化曲线更为光滑,最大超调量也较小,但是快速性略差。约1 s后,航迹角的数值已经由负转正,此时飞机的轨迹已经从下滑改变成上升,进入了爬升阶段。
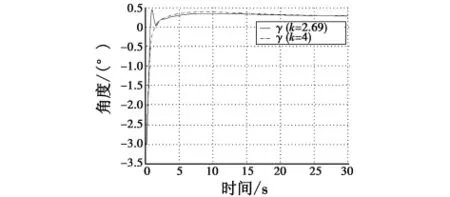
图4 两组控制参数下航迹角γ的变化曲线Fig.4 Change of γ with 2 kinds of parameters
4.2 阵风扰动影响分析
阵风扰动在初始时刻加入,持续时间约为6 s,约在3 s时达到峰值。图5为正常控制状态的高度H变化曲线与分别加入前向、垂向阵风干扰情况时的对比图。在加入阵风扰动之后,下沉时间明显延长。不同的是,前向阵风扰动过后,高度的响应有回归趋势;而垂向阵风过后高度的响应存在稳定的滞后。另外,曲线中飞机的下沉量始终小于2.5 m,满足了飞机起飞离舰后下沉量不能超过3 m的要求。

图5 3种情况下的高度H曲线Fig.5 Curves of height in 3 different conditions
5 结束语
本文重点设计了上升段的姿态控制律。仿真结果说明,正确的控制方法可以改善弹射起飞的过程中不利的初始姿态,并且满足起飞时上升特性的要求。通过阵风对飞机特性的影响可以看出,只要控制律合适,在上升过程中控制好飞机的姿态,舰载机可以抵抗一定幅值的气流干扰,下沉量也在正常范围之内,确保了舰载机起飞的安全性。
[1] 林国锋,何植岱.舰载飞机弹射起飞过程中的几个问题[J].飞行力学,1991,9(3):31-39.
[2] 郑本武.前起落架突伸对舰载飞机弹射起飞航迹的影响[J].南京航空航天大学学报,1994,26(1):27-33.
[3] 郭元江,杨汀,李会杰,等.复杂环境下舰载机弹射起飞环境因素建模分析[C]//中国制导、导航与控制学术会议,2010:504-509.
[4] 王延刚,屈香菊.舰载机起飞时机辅助决策系统建模[J].航空学报,2009,30(11):2066-2071.
[5] 王俊彦,吴文海,高丽,等.舰载机弹射起飞建模与控制[J].飞机设计,2010,30(2):10-13.
[6] 刘星宇,许东松,王立新.舰载飞机弹射起飞的机舰参数适配特性[J].航空学报,2010,31(1):102-108.
[7] WANG Weijun,QU Xiangju,GUO Linliang.Multi-agent based bierarchy simulation models of carrier-based aircraft catapult launch[J].Chinese Journal of Aeronautics,2008(21):223-231.
[8] 严重中,冯家波.舰载机弹射起飞自动控制上升的飞行特性[J].飞行力学,1996,14(1):41-47.
[9] 严重中,冯家波.舰载飞机弹射起飞上升段的自动控制飞行[J].南京航空航天大学学报,1995,27(4):431-438.
[10] PATTERSON D,MONTI A,BRICE C,et al.Design and simulation of an electromagnetic aircraft launch system[C]//Power Electronics Specialists Conference,2002:1950-1957.
[11] 舰群.蒸汽弹射器揭秘[J].海空力量,2008(12):71-74.
[12] 安治永,李应红,吴利荣.基于混沌遗传算法的飞机高原滑跃起飞跑道优化设计[J].电光与控制,2006,13(4):52-56.
