多传感器交叉提示技术若干问题
2012-08-27黄树彩韦道知高美凤
樊 浩, 黄树彩, 韦道知, 高美凤
(1.空军工程大学防空反导学院,陕西 三原 713800; 2.中国人民解放军93507部队,石家庄 050207)
0 引言
多传感器组网协同探测可以有效发挥不同传感器的能力以增强对目标的探测、识别和跟踪能力。其中,传感器交叉提示是协同探测的一个重要方式。所谓一个传感器对另一个传感器的提示,就是当一个传感器得到有关目标的估计信息后提示给另一个传感器,被提示传感器根据提示传感器提供的提示信息迅速指向目标进行协同探测,为信息融合提供必需的数据。
本文在系统总结多传感器交叉提示技术研究现状的基础上,详细分析研究了多传感器交叉提示的若干相关问题,对多传感器交叉提示问题进行了有益的尝试和探索,为更好地研究多传感器协同技术奠定了基础。
1 多传感器交叉提示技术研究现状
文献[1]认为传感器的提示是一个协作的处理过程,对共同的目标利用不同的传感器获取数据,即可利用一个传感器的观测或跟踪数据使另一个传感器指向目标,通过分析另一个传感器的探测信息来确认获取的目标和先前获取的目标是同一目标。文献[2]认为一个传感器获取的信息可能被另外的传感器利用来达到更快的探测。以上对交叉提示的描述表明其可以增强探测预警的准确性和及时性。
文献[3]认为传感器提示就是当单个传感器探测到目标后提示其他传感器监视这个目标的区域,被动传感器提示主动传感器,以使主动传感器在需要的时候开启,低分辨率传感器提示高分辨率传感器,虚警率高的提示虚警率低的传感器,以提供关于目标的高可靠信息。
文献[4]把传感器管理和传感器提示联系起来,认为传感器管理不仅包括传感器的控制还包括传感器的提示,而且把传感器提示定义为两个形式:一是传感器的交接,以确保大跨区目标平滑的转换和跟踪误差的降低;二是通过另一个传感器来协助进行目标额外或更详细信息的获取。
文献[5]集中讨论军事监视环境下通过提示和交接协同地跟踪目标,提出了基于整子(holon)控制结构对不同的传感器资源进行管理,并指出提示和交接的两种情形:同一平台的传感器之间以及不同平台的传感器之间的交接和提示。
文献[6]认为在多传感器多平台系统中,把正确的传感器在正确的时间分配给正确的目标的能力需要传感器之间的交叉提示,同时这对于融合操作和优化资源配置是必须的。
文献[7]研究了同地配置下ESM(电子支援措施)对2D雷达、3D雷达以及红外传感器(主要是IRST)对3D雷达的引导提示概率并对其进行了解析表达,讨论了引导提示成功概率的性质。
文献[8-9]研究了同一平面异地配置下ESM对2D雷达以及IRST对3D雷达的引导,推导了引导方程,分析了引导误差,并对引导误差和引导概率进行了仿真。
文献[10 -11]利用多智能体(Multi-Agent,MA)理论研究了基于多智能体理论的分布式协同策略,较好地解决了传感器网络的协同目标跟踪问题。多智能体之间通过协作协议来实现智能体之间的协同,使多个智能体的行为呈现一致性,从而实现整体目标。可以起到实现信息共享、统一协调传感器探测行为、提高信息融合系统综合效能的作用。其符合自动交叉提示的要求,用于交叉提示将会取得较好效果。
文献[12]提出了一种基于MA协商的自动交叉提示技术,一个传感器Agent感知到环境中的一个事件后,首先建立一个能够响应这个事件的候选Agent联合,然后与联合中的Agent进行协商以实现任务的最佳执行,并采用一个多维、多步的协商策略,发起协商的Agent与响应Agent之间充分就传感器完成协作任务的资源约束和时间约束进行协商,以期任务能在最合适的时间以最大的合成效用得以执行。
在科索沃战争中,美国空军利用U2侦察机和“捕食者”无人机的交叉提示来精确定位目标。同样在阿富汗战争中,“全球鹰”提示“捕食者”飞向可疑目标进行侦察。
交叉提示将在未来的情报、监视、侦察(ISR)系统的发展中占据中心的位置,其中很显著的应用即美国空军的目标导向和交叉提示系统[13](Airborne Targeting and Cross-Cueing System,ATACCS)。该系统运用多传感器交叉提示技术,允许系统用一个传感器检测目标,然后动态地重新分配任务给其他传感器实时地收集额外的关于目标的信息;然后再利用成熟的ATC/R算法来确定目标的身份信息;最后,该系统将预处理大量的传感器平台上的数据,用地理位置的数据进行融合,通过数据链仅发送相关的信息给地面站。这不但能减少图像分析者的工作量,而且还能减少数据链的负担。
2003年5月8日~14日,美国陆军利用装备了战术无人机雷达(TUAVR)的“猎犬”无人机进行了一系列作战任务试验,成功地演示了增强的侦察能力。演示的高潮是两架“猎犬”执行作战任务,一架装有合成孔径雷达(SAR)/活动目标指示器(MTI),另一架装有“猎犬”标准电光/红外传感器(EO/IR)有效载荷。操作员接受不到两周时间的熟悉雷达训练,便能够使用SAR/MTI套接能力以及传感器交叉提示技术纵览探测整个目标区域。即利用TUAVR探测目标,并用EO/IR有效载荷确认识别它们。
文献[14]给出了用MTI数据来增强无人机定位、跟踪、分类和鉴别目标的能力,给出了两个验证方案:1)联合监视目标攻击雷达系统(JSTARS)和无人机(UAV)之间的交叉提示,接收卫星链下传的JSTARS数据来提示“捕食者”UAV的地面控制站以快速地定位、跟踪、分类移动的目标;2)无人机内部战术增强合成孔径雷达(TESAR)和EO/IR之间的交叉提示。
纵观多传感器交叉提示技术研究的现状,只是片面描述了传感器交叉提示的含义及在某一方面的应用,没有给出其完整的定义,对交叉提示技术的其他相关问题研究甚少,且没有进行全面梳理与研究。
2 传感器交叉提示的概念
综合现有文献,将传感器交叉提示定义为:当一个传感器发现了潜在的目标时,会提示其他传感器直接对该目标进行额外或更详细信息的获取,为信息融合提供必需的数据;同时又能够在目标稍纵即逝的情况下,要求其他传感器马上对这个可疑目标进行观测,以满足时间上的紧迫信息需求,即进行目标交接;交叉指的是传感器彼此之间互相提示,被提示的传感器也可能是发送提示的传感器,反之亦然。其中包括和哪个传感器进行协作、协作时传感器资源冲突的解决方法,即多传感器交叉提示中的协作、协调机制以及协作的传感器怎样协商进行对任务的更好执行调度,即多传感器交叉提示中的协商机制。
3 多传感器交叉提示的地位及作用
3.1 多传感器交叉提示地位
1)与传感器管理的关系。
交叉提示技术和传感器控制共同构成了传感器管理的内容,传感器交叉提示是传感器管理系统的一个重要组成部分[4,15]。
2)与信息融合的关系。
信息融合是集中式的,它把所有传感器发送来的信息进行融合得到一个较为精确的信息[16],所需信息量大,处理耗时长。传感器交叉提示是分散式的,在传感器数据丰富的环境下,通过控制数据获取过程有选择地获取传感器的信息,仅收集和存储那些真正需要的数据,从而使各传感器避免过量的数据存储和计算。
同时,传感器交叉提示是更好地进行信息融合的技术基础,构成了信息融合系统的反馈环节,弥补了信息融合的不足,提高了传感器的利用率。由此看出,两者是相反又互补的关系。
3)与传感器指示交接的关系。
传感器交叉提示强调交叉,提示是对等的,传感器之间彼此互相提示,被提示者不必一定要对其做出响应,提示也可以分等级,等级越高的提示要求越快地响应,目的是更精确地探测、识别以及跟踪目标等。传感器指示交接是命令式的,被指示的要对其做出响应,目的是保证目标轨迹观测的连续性。传感器交叉提示广义上也包含了传感器的指示交接内容。
3.2 多传感器交叉提示作用
1)交叉提示减少了融合所需的时间和资源,将很大程度上减少目标搜索分类时间并减少关联/融合所必需的资源,同时降低了处理器的能力及通讯要求,提高了决策时间和数据融合系统的精度并增加态势感知。
2)传感器交叉提示优化了传感器的覆盖和传感器平台之间的信息流动,从而更有效地搜索,增强检测效能。
3)传感器在需要时被开启,其余时刻处于休眠状态,节省资源且提高资源利用率。
4)在出现稍纵即逝目标的情况下,要求其他传感器能够马上对这个可疑目标进行观测,以满足时间上的紧急信息需求。
4 多传感器交叉提示的条件及内容
传感器交叉提示的条件描述了传感器网络在何时需要传感器之间的提示,描述如下。
当传感器网络中的一个传感器发现了潜在的目标时,传感器(或融合中心)根据当前所获取目标信息融合判断:
1)是否达到融合中心预先设置的期望性能指标(包括期望的目标探测概率、正确识别概率以及跟踪的精度等);
2)目标是否还在当前传感器的探测、跟踪范围内,进而决定是否需要进行目标交接,其交接条件为①目标即将离开当前传感器的跟踪区域;② 另一个更高优先级的目标进入当前传感器的可跟踪区域,且当前传感器同时只能探测跟踪一个目标;③ 当前正在跟踪目标的传感器只有一个(例如雷达),且由于某种原因(故障或受到反辐射导弹威胁必须关机)不能工作时,需要把目标交接给其他传感器。
综上,当信息量不足以达到期望的探测、识别、跟踪性能指标以及需要目标交接时,传感器之间需要交叉提示以获取更多、更详细的信息从而确认目标、提高正确识别率以及跟踪精度。
满足了交叉提示的条件,开始进行传感器的提示。军事上,自动交叉提示的内容是目标信息等内容,包含以下几方面:
1)所执行的具体任务项(包括任务的类型,如探测、识别、跟踪,开始、结束时间,所探测的信息种类及精度);
2)发送提示信息的传感器平台位置信息(经纬度、高度或在某坐标系中的位置等);
3)发送提示信息的传感器所探测到的关于目标或可疑区域的信息(目标状态或身份的粗略估计或可疑区域的大致范围)。
5 多传感器交叉提示技术需求
5.1 交叉提示技术对传感器的要求
传感器交叉提示对传感器以及系统设计的要求可归纳为4个方面:
1)要求传感器能够实时、在线彼此交叉提示;
2)平台设计要考虑到交叉提示软件的代价,通信链路要便于交叉提示;
3)要考虑到传感器的可获得性,即目前的信息知识对于期望的行动所需的额外信息;
4)传感器不仅要能作为探测系统独立进行目标信息获取,而且还要能成为“系统中的系统”,在作战中心的指挥和控制下,通过通讯网络与其他传感器联合进行目标信息的获取,即要求传感器具有一定的自主性。
综上,根据现有文献和技术发展可预测实现多传感器交叉提示最佳的方式就是多智能体技术(Multi-Agent Technology,MAT)[17],它也将成为交叉提示技术的发展趋势,即把探测网中的传感器看作一个智能体(Agent),单个传感器Agent可以单独执行任务,也可以和其他传感器Agent组成多Agent系统协作共同完成任务,以解决单个Agent不能解决的复杂问题,体现了传感器的自主性和协作性。把MAT应用于传感器的交叉提示中,必然对传感器管理结构以及其作为反馈环节组成的信息融合系统结构提出了新要求,所以应首先基于MAT来构建传感器网络中的多传感器协作管理结构以及多传感器交叉提示的信息融合结构。
5.2 基于MAT的多传感器协作管理结构
从地理位置上看,传感器在战场空间的分布兼具“集中性”和“分散性”,“集中性”是指传感器都是以作战平台为载体相对集中分布,且受本平台的控制和管理;“分散性”指传感器分布在陆海空天的立体空间中,占据的总体空间范围大,通过战术信息网连接而构成庞大的传感器立体探测网[18]。基于MAT构建的具有多传感器交叉提示功能的传感器协作管理结构如图1所示。
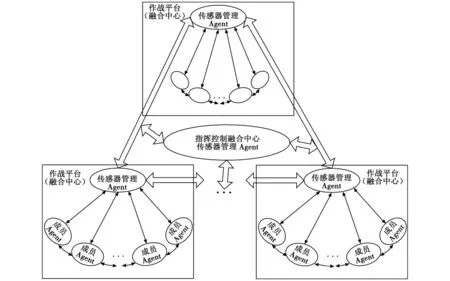
图1 基于MAT的多传感器协作管理结构Fig.1 Configuration map of multi-sensor cooperation management based on MAT
这里对作战平台采用两类Agent:传感器管理Agent和成员Agent。传感器管理Agent一般由作战平台的指挥控制系统担任,它有双重职能:1)根据指挥控制融合中心传感器管理的任务与其他平台的传感器管理Agent进行交互,实现作战平台之间的任务协同和交叉提示;2)对平台内的传感器成员进行管理,即将平台作战任务进行分解,分配给本平台内的个体传感器成员,并对其任务执行过程进行监控,以及担当不同平台个体传感器进行通讯协作的“桥梁”。成员Agent可以是单个传感器,也可以是传感器的组合,负责执行传感器管理Agent分配的任务,它们之间也可以通过通信和协调实现作战平台内的任务协同和交叉提示。
5.3 基于MAT的交叉提示信息融合结构
多传感器交叉提示的目的是为了更好地进行信息融合,是构成信息融合体系的重要反馈环节。一方面,信息融合中心可对各传感器获取的以及其自身的状态信息进行分析、处理与融合,从而产生融合结果,确定所需执行的目标任务;另一方面,融合中心得出的关于任务的完成情况、还需执行的任务等可以作为驱动多传感器交叉提示的依据。MAT较好地满足了构建具有交叉提示功能多传感器信息融合系统的需求,结合以上所提出的基于MAT的多传感器协作管理结构,构造基于MAT的多传感器交叉提示信息融合结构,如图2 所示[19-21]。
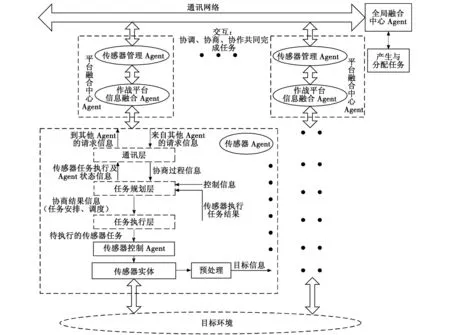
图2 基于MAT的交叉提示信息融合结构Fig.2 Configuration of information fusion with cross-cueing based on MAT
其中各Agent的功能及其运行机制如下。
1)平台融合Agent。
①从全局融合Agent获取各平台传感器Agent的地理位置、状态、能力等信息;
②各平台融合Agent将下辖的各传感器的情况和能力(传感器工作是否正常、传感器的最大跟踪能力、最大跟踪距离、跟踪精度等)等信息提交给传感器管理Agent;
③对各传感器Agent发送来的所有相关信息进行融合并进行局部态势和威胁估计;
④根据传感器管理Agent的需求,把融合后的目标估计信息作为传感器管理Agent优化传感器管理策略的依据;
⑤根据传感器管理Agent的分配任务(传感器目标配对)对特定的传感器组合的数据使用适当的融合策略进行融合估计;
⑥接受传感器Agent的请求,为传感器Agent提供其他传感器Agent的行为策略、其他相关资源以及融合结果。
2)全局融合Agent。
①存储以及实时更新各平台传感器Agent的地理位置、状态、能力等信息,相当于一个传感器性能、配置知识库;
②对各平台融合Agent发送来的所有相关信息进行数据融合,并进行态势和威胁估计以及产生、分配相应的目标任务;
③对系统任务的性能指标以及是否需要目标交接进行监控,以便确认所要求的总体性能指标是否达到和保证目标尽可能连续“可见”。
3)传感器管理Agent。
①接收传感器Agent不能完成的任务或需要协作完成的任务以及协作的提示请求信息;
②根据协作任务的请求获取平台下传感器Agent执行任务的现状和能力,并提供给发出协作的传感器Agent;
③根据平台/全局融合Agent的态势、威胁估计和信息需求确定下一个管理周期需要执行的任务清单(包括任务优先级和性能指标),并对管理员根据战术需求输入的任务以及传感器Agent提出的请求任务进行管理并把任务传递给传感器平台下的单个传感器。
4)传感器Agent。
传感器Agent的内部结构如图2所示,它进行任务规划与目标信息获取,并将测量数据传送给平台融合Agent。
①任务规划层根据平台/全局融合Agent、其他传感器Agent发送来的信息、传感器管理Agent分配的任务和其优先级以及自身的能力状态确定在下一个传感器管理周期各传感器需完成的任务集及如何对其任务执行进行调度;
②通讯层通过规划层可了解传感器Agent完成任务的状态和能力,只有那些能被该传感器Agent完成的任务(或把该任务分解成若干个子任务,把可以执行的子任务交由此传感器Agent来执行)才被传送到规划层,如果某些任务无法执行,通讯层将确定应该由其他传感器Agent协作执行的任务,或者将结果通知给其他传感器Agent;
③Agent内部规划层和执行层之间的信息传送由通讯层负责,它发送其不能完成的任务/分解后的子任务(需要协作完成的任务)以及协作的请求提示信息,也接收来自本平台或其他平台传感器Agent以及融合中心的任务执行请求、通知、提示或结果信息,同时该层也支持分布式决策中的协商过程,根据传感器Agent中的任务安排协商以怎样的调度形式完成提示的任务,最后确定下一个管理周期内所要执行的传感器任务及其优先级;
④任务执行层的功能取决于传感器的类型及其完成传感器任务的能力。
5)传感器控制Agent。
与传感器实体绑定,用来直接驱动或控制所对应的资源,负责把传感器任务协商方案转换为传感器可执行的命令,同时还完成传感器的模式、参数选择等具体操作。
6 基于任务驱动的多传感器交叉提示过程
传感器交叉提示本质上是根据当前的信息,对于期望的行动获取额外信息或执行其他操作的过程。其中期望的行动就是系统所要执行的任务,当前的信息就是当前所获取的关于目标信息以及态势、威胁评估结果,所需的额外信息就是提示其他传感器获取额外的或更精确的目标信息,最后信息融合中心通过融合多个传感器获取的目标信息来完成系统所要执行的任务。任务的产生、执行驱动着交叉提示过程的完成,并贯穿于多传感器交叉提示过程的始终。基于任务驱动的多传感器交叉提示过程的示意图如图3所示。
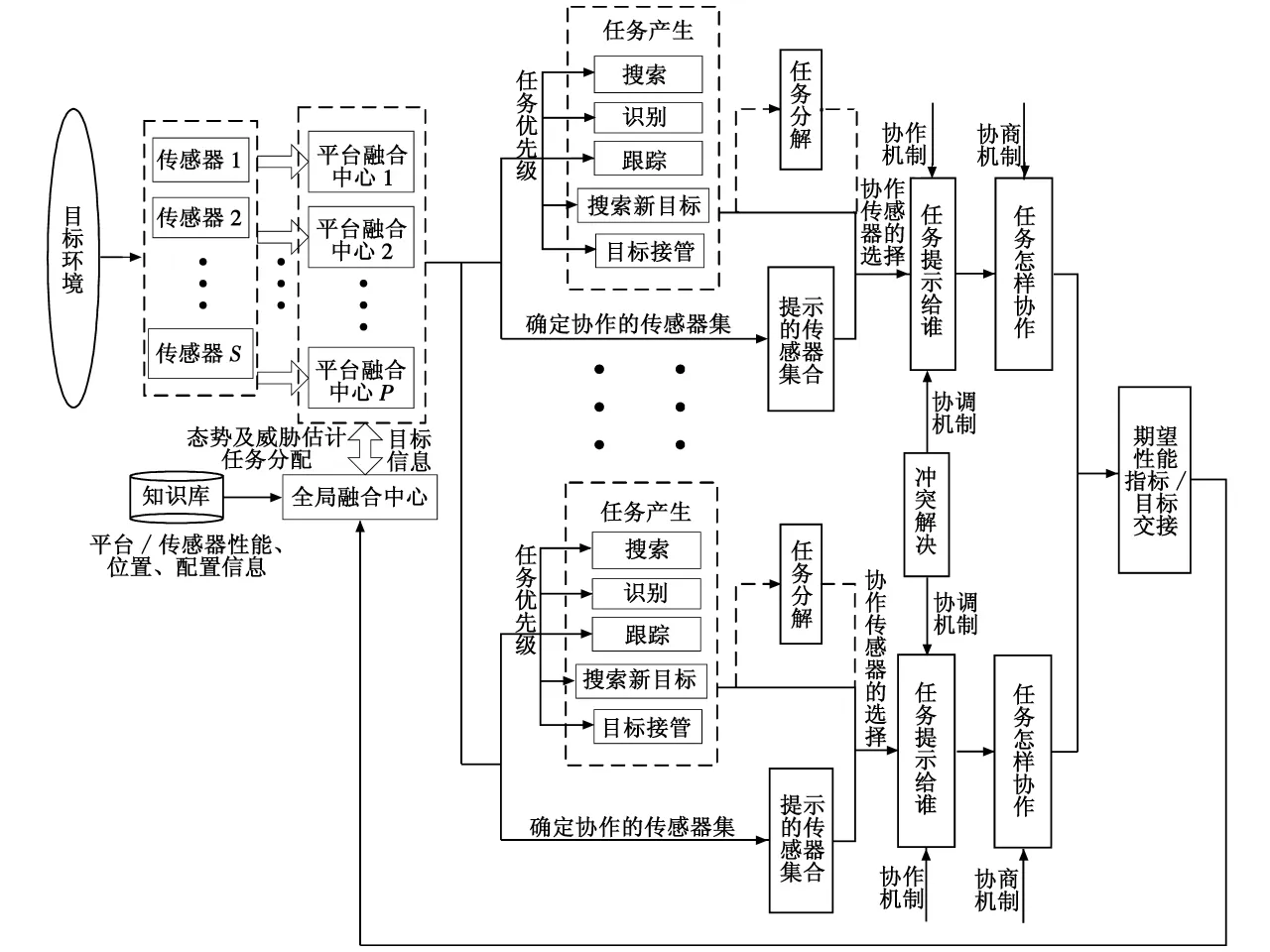
图3 基于任务驱动的多传感器交叉提示过程示意图Fig.3 Sketch map of multi-sensor cross-cueing course based on task driving
首先,平台融合中心根据发现目标的传感器节点获得的关于目标身份和状态的粗略估计信息,全局融合中心预先存储的或实时侦察到的战场动态变化的传感器配置、位置、性能知识、态势、威胁评估结果,以及所要完成的目标任务性能等信息确定当前时刻的所需执行的任务,并根据相关信息将其分成两种:1)平台融合中心确定的或全局融合中心分配的,只需某个传感器就能够独立完成而不需要协作执行的任务或只能由某个传感器执行的任务,同时找出只能被某个传感器执行的,以及可以单独完成该任务的传感器集合;2)需要和其他传感器协作执行的目标任务,或把协作任务按照一定的原则、策略进行分解后需由其他传感器节点执行的子任务,同时为每个协作任务确定一个将能够执行这些任务的传感器集合。
其次,需要协作完成某些任务的传感器直接(当距离较远时通过融合中心)给当前时刻某协作任务所确定的传感器集合中的所有传感器发送提示信息(任务或分解后的任务及相关信息),接收提示信息的传感器根据自己的性能、执行任务的情况,预测响应提示后协作执行任务的效益,随后发送提示信息的传感器根据某种协作、协调机制(当需要协作的传感器资源冲突时的解决方法)确定需要和集合中的哪个/些传感器进行协作,即解决任务提示给谁的问题,随即协作的传感器进行响应,其他传感器则不响应协作。
再次,发送提示信息的传感器和确定需要协作执行某些任务的传感器,依据某种协商机制就任务在发送提示信息的传感器和响应提示信息的传感器之间进行协商,即发送提示信息的传感器和响应提示信息的传感器根据自己的任务安排进行协作任务的调度,以解决任务怎样协作执行的问题,随即控制传感器的模式、工作参数、任务安排进行任务的执行。
最后,各传感器把获取的传感器报告发送给融合中心进行融合,计算是否满足任务要求的性能指标以及目标是否需要交接,当不满足时,继续产生任务和协作的传感器集合进行任务的协商、协作,此过程是一个多次循环的提示过程,直到满足下列条件之一时不再进行提示协作:1)达到任务时限要求;2)达到要求的性能指标;3)没有可以协作的传感器资源;4)目标任务完成的性能不再提高。该过程只需和相关的传感器资源进行协作,不需要所有传感器的观测数据,减少信息的处理量,同时降低处理器的能力及通讯要求,使传感器资源得到充分利用。
7 结束语
多传感器交叉提示技术是多传感器协同的重要内容,本文对其若干问题进行了分析与研究,并利用多智能体技术对交叉提示技术进行了初步研究,交叉提示技术随着智能体技术的不断发展必将获得很大的发展,同时,传感器智能化水平的不断提高也支撑着交叉提示技术更快更好地应用于实际,所以应瞄准多智能体技术在多传感器交叉提示技术中的应用。下一步还应研究多传感器交叉提示技术应用于目标探测、识别以及跟踪的数学模型,并进行实例仿真。
[1] AVALLE M.Studies and simulations on sensor fusion and cueing for fighter application[R].Advisory Group for Aerospace Research and Development,North Atlantic Treaty Organization:SECTION IV.Cananda:Cananda Communication Group,1996:224-229.
[2] STROMBERG D.A sensor-independent sensor-oriented tracking architecture[C]//1999 IEEE Information Decision and Control Conference,Adelaide,Australia,1999:111-116.
[3] DAVID P.Multiple sensor cueing using a heuristic search[C]//SPIE Applications of Artificial Intelligence,1991,1468:1000-1009.
[4] NG G W,NG K H,WONG L T.Sensor management-control and cue[C]//The 3rd international conference on information fusion,Singapore,July 10-13,2000:WeB1-16-WeB1-17.
[5] BENASKEUR A,KHAMIS A,IRANDOUST H.Multisensor cooperation in military surveillance systems[C]//The 3rd International Conference on Signals,Circuits and Systems,Medenine Tunisia,2009:1-6.
[6] UIJT DE HAAG M,ZHU Zhen,SOLOVIEV A,et al.Tightly-Integrated LADAR/INS algorithm development to support urban operations,AFRL-SR-AR-TR-09-0114[R].Ohio,USA:Ohio University Avionics Engineering Center,2009.
[7] 王国宏.分布式检测、跟踪及异类传感器数据关联与引导研究[D].北京:北京航空航天大学,2002.
[8] 彭锐晖,王树宗,吕永胜,等.异地配置下ESM对2D雷达的引导分析[J].现代雷达,2009,31(1):13-16.
[9] 吕永胜,王树宗,彭锐晖,等.异地配置下IRST对3D雷达的引导分析[J].红外与激光工程,2008,37(5):911-915.
[10] 周丰,鲜明,肖顺平.基于多智能体技术的协同信息融合系统研究[J].指挥控制与仿真,2006,28(4):13-16.
[11] 杨津骁,丁慧勇,程远国.基于多智能体的传感器网络协同目标跟踪技术研究[J].军事运筹与系统工程,2007,21(3):43-47.
[12] 黄树彩.区域防空传感器资源优化分配算法研究[D].西安:空军工程大学,2005.
[13] GORDON L,HAGEE M,BRYANT M S,et al.Feasibility demonstration of the Automated Targeting and Cross Cueing System(ATACCS)at the Air Combat Command Transformation Center[C]//The 22nd Digital Avionics Systems Conference,Indianapolis,IN,United States,Oct.12-16,2003:10.D.l-1-10.D.l-4.
[14] MUCCIO A B,SCRUGGS T B.Moving Target Indicator(MTI)applicationsforUnmanned AerialVehicles(UAVs) [C]//radar,Conference,Proceedings of the International,IEEE,2003,541-546.
[15] 何友,关欣,王国宏.多传感器信息融合研究进展与展望[J].宇航学报,2005,26(4):526-530.
[16] 董志荣.三论信息融合—研究与应用中的几个问题[J].电光与控制,2005,12(2):1-5.
[17] 范玉顺,曹军威.多代理系统理论、方法与应用[M].北京:清华大学出版社,2002.
[18] 黄俊,滕鹏,于雷,等.C4ISR多传感器跟踪资源协同分配方法研究[J].系统仿真学报,2009,21(3):851-852.
[19] 张广远,王福军,魏震生.Agent的多传感器管理方案[J].火力与指挥控制,2009,34(7):168-170.
[20] 程红斌,张晓丰,张凤鸣.基于Agent的多传感器管理原型系统研究[J].现代防御技术,2006,34(2):44-50.
[21] 李薇,张凤鸣.基于多Agent的传感器管理系统研究与设计[J].传感器与仪器仪表,2006,22(7-1):157-159.
