无人机着舰引导信息处理方法研究
2012-08-27申振晴
申振晴, 张 斌, 龚 昂, 雷 磊
0 引言
1 远引导信息处理
由于航母自身的六自由度运动,导致理想下滑轨迹并不是固定不变的,而是伴随航母的运动而运动[5]。在远距引导区时,这种运动被放大[6],如图1蓝色实线所示,导致无人机飞控系统无法跟踪理想下滑轨迹,而这时无人机也无需十分精确的引导信息,所以针对这种情况提出采用曲线拟合的方法,对理想下滑轨迹进行曲线平均,代替原来的理想下滑轨迹,使得无人机易于跟踪,如图1蓝色虚线所示。

图1 远距引导信息处理示意图Fig.1 Information processing scheme of long-distance guidance
1.1 理想下滑轨迹的计算
根据文献[5,7]所述,理想下滑轨迹的计算需考虑机型、舰船尾流以及舰船运动等诸多情况。首先计算无舰船运动时的理想下滑轨迹,再根据测得的舰船六个自由度的运动经过坐标变换得到理想下滑轨迹的运动,如图2所示。实际中,着舰引导系统均有延迟,可以采用超前网络或者舰面运动预测的方法消除。

图2 理想下滑轨迹计算方法Fig.2 Computation method of ideal landing trajectory
1.2 理想下滑轨迹拟合
所谓曲线拟合就是用一条曲线对数据或波形的变化趋势进行拟合,反映了该数据或波形的平均变化趋势。采用n次多项式拟合方法来拟合,首先确定多项式的阶数,阶数太低会与曲线变化趋势偏差较大,阶数太高会趋于原曲线,由于远距引导对引导精度需求不高,用5~7阶多项式均可满足曲线拟合的要求,所以应根据一般舰船运动状况和下滑轨迹的运动折衷选取为6阶。其次,要确定n次多项式的系数,这在Matlab中已有现成的函数polyfit,将理想下滑轨迹的数据以及所需求的阶数代入,就可以求得多项式的系数,最后调用polyval函数生成拟合曲线。
假设理想下滑轨迹在纵向随着距离的增加变化如图3蓝色曲线所示,选定多项式阶数为6阶,则拟合后曲线如图3中红色曲线所示。
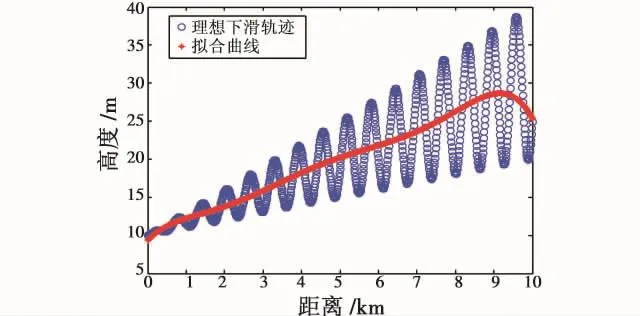
图3 曲线拟合方法Fig.3 Curve fitting method
实际上理想下滑轨迹是一条三维曲线,上述方法只适用于二维,所以将理想下滑轨迹在两个面上投影,一个面是惯性坐标系的水平面XOY,另一个面是惯性坐标系的垂直平面YOZ,其中O点为舰船摇摆中心,在舰船无摇摆时,惯性坐标系与舰船坐标系重合。按右手准则,Z轴垂直向上,Y轴指向船艏,X轴指向船舷。运用上述曲线拟合的方法分别在两个平面内对投影曲线进行拟合,最后再合成三维的理想下滑轨迹拟合曲线。
1.3 远距无人机引导率的计算
着舰雷达测得的飞机位置信息是经过稳定平台稳定后飞机在惯性坐标系下的位置信息,它对舰船的运动不敏感[8-9],所以实时根据测得的无人机位置信息经过坐标变换与曲线拟合后的理想下滑轨迹比较,产生无人机引导率,送往无人机飞行控制系统,不断纠正无人机的位置偏差,实现无人机对下滑轨迹的跟踪,见图4。

图4 远距引导率的计算方法Fig.4 Computation of long-distance guidance rate
2 近距引导信息处理
跟远距引导不一样的是,无人机需要实时跟踪理想下滑轨迹的运动,而着舰雷达测得的无人机位置信息是经过稳定平台稳定后在惯性坐标系下的位置信息,不能反映舰面的运动,需要进行运动补偿,计算量大。而且稳定平台是机械式的伺服机构,近距引导可能失效或者精度不高[4-5],在着舰的最后阶段很容易使无人机偏离理想下滑航迹过远,迫使无人机拉起复飞,本文针对这种状况提出了舰面近距多天线定位方法,它利用多副安置在舰船上的测距天线测量与无人机的距离,最终得到无人机相对于舰船的位置,如图5所示。
生物修复技术在无锡市前胡村浜河道治理中的应用……………………………… 金雪林,李京辉,施怀荣等(19.46)

图5 舰面多天线测距定位Fig.5 Multi-antenna ranging on the ship
这种方法所用的测距天线是固联在舰面上的,随着舰面的运动而运动,测得的位置信息是无人机在舰船坐标系中的位置,直接跟计算好的理想下滑轨迹比较就可以得到无人机的引导率。该方法的测量精度主要受到各个距离测量装置的空间布置方式,即几何精度因子[10]的控制。一般而言,只有当无人机到舰面的距离较近时,才能获得较好的测量效果,因此采用这种方式可以满足无人机近距着舰引导。
距离的测量是指无人机到舰面测距天线相位中心的视线距离,舰面近距多天线定位方法采用短脉冲测距的方法实现[11]。考虑到无人机着舰过程中,靠近着舰点处需要高精度距离测量,因此基于二次雷达测距原理实现距离的测量。采用这种方式的优点是信号空间传播衰减少,能够提高信噪比,提高测距精度,其次还有助于实现多目标引导。具体办法是舰面系统安装询问器,无人机上安装自动应答装置。当舰面系统通过空中交通管制系统得知有无人机需要着舰时,就按一定、可控速率向着舰方向发送询问脉冲。当无人机截获该询问脉冲,经过固定时延后,向询问器发送应答信号,该应答信号包含了无人机的识别信息。舰面测距天线通过测量应答信号与询问信号之间的时间差,并对应答信号进行解码,可以获得指定无人机的距离信息,通过多个距离测量值就可以准确对无人机进行定位。
测距精度是衡量着舰引导性能的关键因素之一。根据无人机着舰的特点可知,随着无人机靠近着舰点,其对着舰引导信息的精度要求逐渐提高,而要求精度最高时出现在着舰点附近,因此测距最高精度应该由着舰点误差确定。提高测距精度的方法:一是可以采用宽带脉冲,多脉冲累计,提高信噪比,降低金属飞行甲板对信号削弱的影响(金属介电常数比较大);二是需要参考源进行实时的校准,保证多副测距天线测距同步;三是可选取背景噪声和干扰小的频段,减小被干扰概率[12]。考虑到多目标引导问题,应答脉冲可以采用伪随机编码形式,从而保证不同无人机的应答信号是正交的。需要指出的是,提高测距精度是以高运算量为代价的,较高的运算量对系统硬件要求较高,成本也会提高,测距精度应以能满足无人机安全着舰为上限,根据成本和设备实现复杂度而定。采用多个测距天线联合定位,可以降低对单个测距天线测距精度的要求。
2.1 舰面多天线测距定位法
如图 5 所示,多副天线的位置为(xi,yi,zi),i=1,2,…,N,测得的距离值为 ri,i=1,2,…,N。这 N 个距离值确定了飞机的位置,即

由ri与rN的表达式,得

1)当N=3时,解方程组

可得x,y关于z的线性函数为

用矩阵表示为


将式(8)代入

则式(9)变成关于z的一元二次方程,可直接求解上式,得到z的两个值,采用解定位模糊的方法,去掉一个不真实的z值,然后,将z值代入式(8),可得到最终的对x,y,z的估计值。
2)当N≥4时,由式(2)表示的N-1个方程可写成矢量矩阵形式

选择合适天线位置,使rank(A')=3。由上式可解得飞机位置估计值,为

定位误差可由式(2)对x,y,z,ri全微分得到。定位误差的协方差为

舰面安置测距天线,不可避免会有舰面反射带来多径的影响,同时考虑到几何精度因子的影响,多副测距天线张成的多边形面积越大,则定位精度越高,所以尽可能地将测距天线安置在舰面着舰端与舰船两侧边沿,降低舰面反射对测距天线的影响,提高定位精度。舰面多天线测距法与GPS多星定位原理相似,测距天线数量越多定位精度越高,但是考虑到天线之间的相互影响,以及运算量和成本,舰面参考“瓦良格”号的300 m×70 m大小,折中确定在舰面着舰端与舰船两侧边沿等距安置5副测距天线为宜。视舰面为长方形,天线间距约为130 m。
在不考虑舰面多径及电磁干扰的情况下,假设测距误差为0.1 m,下滑角为3°,舰面以“瓦良格”号为参考,在舰面周边等距安置5副测距天线,根据式(12)计算在距着舰点100 m处定位精度可以达到1.34 m,飞机着舰时离着舰点越近定位精度越高,在着舰点处定位精度可以达到0.56 m,完全可以满足无人机着舰精度的需求。由于各方面的影响,实际的定位精度可能达不到如此精确,但是基本可以满足自动着舰在着舰点处纵向精度5 m,横向精度1.3 m的需求[13],最终测距精度的确定有待大量的仿真与实践验证。
2.2 引导率的计算
由于近距无人机需要实时跟踪理想下滑轨迹的运动变化,所以不能对其进行近似拟合处理,关于理想下滑轨迹的计算上文已经说明,不再赘述,引导率计算示意如图6所示。

图6 近距引导率计算方法Fig.6 Computation of close range guidance rate
3 远近距引导切换方法
无人机对由舰面运动引起的理想下滑轨迹的精确跟踪是在着舰前12.5 s开始的[11],在此之前视为远距引导,之后为近距引导,根据两次测距间的距离差值和测距时间间隔,计算舰载机的平均速度,估计舰载机到达着舰点的时间,完成远近距的切换,具体远近距的判断方法如图7所示。

图7 远近距的判断和切换Fig.7 Judging and switching of guidance process
4 无人机着舰引导信息处理总体方法
以上分别阐述了近距、远距着舰引导信息处理方法以及远近距判断方法,最后给出无人机着舰整个引导信息处理过程的框图,如图8所示。
在舰载无人机着舰过程中,实时探测无人机的位置,同时监测飞行甲板的运动参数,计算无人机与理想着舰轨迹的偏差,从而实时修正和发送无人机遥控指令,飞控系统调整无人机的飞行姿态,使其按照合适的下滑轨迹着舰。
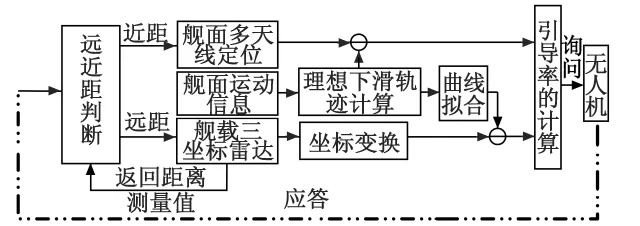
图8 无人机着舰引导信息处理总体原理框图Fig.8 Information processing principle of UAV landing guidance
5 结束语
针对无人机着舰引导提出了近距多天线定位法、远距曲线拟合法以及远近距切换方法,确保了无人机对理想下滑轨迹的跟踪,为下一步与无人机飞控系统方面相结合提供理论依据,对我国无人机安全进近着舰方面的研究有重要意义和一定参考价值。
[1] 唐大全.自主着陆/着舰技术综述[J].中国惯性技术学报,2010,18(5):550-555.
[2] 杨迎化.无人机自动着舰方案研究[J].飞航导弹,2003,11:51-55.
[3] XU Guili,CHEN Xin,WANG Biao,et al.A search strategy of UAV's automatic landing on ship in all weathe[C]//Electrical and Control Engineering(ICECE),IEEE,2011,11(1):2857-2860.
[4] 徐产兴.舰载机着舰引导雷达系统[J].现代舰船,2003,4(1):34-36.
[5] 张勇,张东光.舰载飞机着舰精确轨迹控制研究[J].飞机设计,2006,3(1):50-55.
[6] SPRINKLE J,EKLUND J M,SASTRY S S.Deciding to land a UAV safely in real time[J].American Control Conference,2005,4(1):3506-3511.
[7] 袁锁中,杨一栋.舰载飞机着舰精确轨迹跟踪控制研究[J].飞行力学,2000,18(1):22-25.
[8] 王小军,李殿璞,赵阳,等.舰载三轴雷达波束稳定跟踪的研究[J].哈尔滨工程大学学报,2002,23(1):58-63.
[9] 刘玉洲.舰艇摇摆对雷达测向精度及工作方式的影响[J].舰船电子对抗,2002,25(2):18-21.
[10] 田孝华,周义建.无线电定位理论与技术[M].北京:国防工业出版社,2011.
[11] 高英,谢有才.伪码精确测距与测控体制探讨[J].飞行器测控学报,2001,20(1):36-31.
[12] 丁岚.复杂电磁环境对舰载作战系统的影响分析[J].舰船科学技术,2011,33(1):10-12.
[13] 李跃,邱致和.导航与定位[M].北京:国防工业出版社,2008.
