起重机械主梁塑性变形的机器视觉识别算法
2012-08-24黄凯
黄 凯
(福建省特种设备检验研究院泉州分院,福建 泉州 362000)
1 引言
近几年来,随着国家对起重机械安全工作的重视,起重机械事故呈高发态势的情形有所好转,但总体事故率仍然较高。起重机事故呈现出大型化、群体化、恶性化、突发性、集中性、严重性的特点。起重机械的主要隐患在于塑性变形,而目前的激光测量法和有限元分析法存在不少问题。
因此,以下是提出一种基于机器视觉的起重机械主梁塑性变形的测试方法。
2 常规方法存在的问题
目前主要采用激光测量法[1]和有限元分析法。激光测距法广泛用于各式单梁及双梁起重机空载、静载、动载状态时的拱度指标测量。该方法在地面搭起测量装置,调整校正后测量,是一种远距离的非接触的测量方法。而有限元分析法主要对臂架结构变形进行建模,人工输入钢结构的主要参数,然后计算节点数、有限元节点坐标、有限单元数、空间方向余弦、计算有限元单元的自重、确定变幅机构重量和节点等效载荷,将方程组成整体刚度矩阵,采用有限元方法对空间桁架的单元应力作了精确的求解,同时考虑了温度变化对桁架变形及应力的影响,求得应力集中点后进行应力测试[2]。
但上述方法存在如下问题:a. 无法测量局部变形; b. 对臂架式、塔式、架桥机、门座式等设备无法实行检测;c. 测量步骤繁琐,对测量人员技术要求高,不易实施。
3 机器视觉识别算法
机器视觉就是用图像代替人眼来做测量和判断。在一些危险作业环境或人工视觉难以满足要求的场合,常用机器视觉来替代人工视觉。基于机器视觉识别算法的检测系统已广泛地用于工况监视、成品检验和质量控制等领域,如火车钢轨检测[3]。
3.1 算法流程
识别起重机主梁变形的算法流程如图1所示。
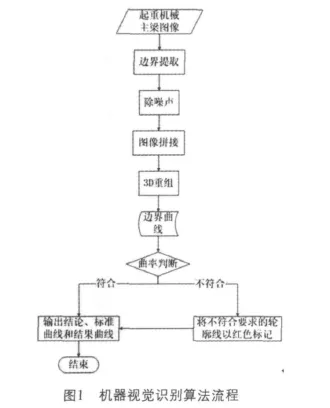
文中将高分辨率相机拍摄到的一组起重机械主梁图像以及该起重机的工作级别作为输入参数,经过边界提取模块、除噪声模块、图像拼接模块、3D重组模块得到边界曲线,然后对该曲线进行曲率计算,得到曲线各点的曲率,用红色标记曲率异常的部分,即局部变形。
3.2 边界提取
由于不同图像灰度不同,所以在两个事物交接的地方会有灰度的变化,因此,图像的灰度设置阈值即可以分割图像。但是,现实世界中的物体是三维的,而图像只具有二维信息,从三维到二维的投影成像不可避免的会丢失一部分信息;另外,成像过程中的光照和噪声也是不可避免的重要因素。
由于起重机械的主梁或起重臂与环境颜色会形成鲜明的对比,即主梁的灰度与环境灰度会有明显的跳变,因此,本文采用Canny算子先对图像进行平滑滤波,消除部分噪声,再进行边缘检测。
3.3 Canny算子[4]
微分算子是图像处理中常用的算子,具有实现简单而且边缘检测的效果较好的特点。常用的微分算子有Sobel算子、Robert算子、Prewitt算子、Laplacian算子和Canny算子。
Sobel没有基于图像灰度进行处理;Robert算子主要用来估算任一相互垂直方向上的梯度,Prewitt算子Sobel算子类似,只是权值有所变化;Laplacian算子只考虑边缘点的位置而不考虑周围的灰度差。而Canny算子是一个综合滤波、检测、放大等、优化等多项功能的算子,适合本文的起重机主梁边界提取。因此,本文采用该算子实现边界提取模块、除噪声模块和图像拼接模块。
首先,用高斯平滑滤波器对一组主梁图像来进行平滑去噪处理;接着,运用Canny分割算法对降噪图像计算图像梯度幅值和方向;然后,将计算结果进行非极大值抑制处理;最后,用Canny算子还设置阈值来进行图像拼接。
3.4 Hough变换[5]进行重组提取边界曲线
Hough变换是识别几何形状的图像处理方法之一。设三维网格和对应二维展平网格上点与点之间的关系,包括距离和相邻等关系,满足伯努力分布,通过最小化三维空间和二维空间关系分布函数之间的距离,将二维网格上点与点之间的关系有效地映射到三维参数域上,得到扭曲很小的三维立体模型的参数化结果。即可将原始图像空间给定的曲线通过曲线表达形式变为参数空间的一个点。这样就把原始图像中给定曲线的检测问题转化为寻找参数空间中的峰值问题,即把检测整体特性转化为检测局部特性。
原始图像坐标系下的一个点和直线分别与参数坐标系中的直线和点相互对应。原始坐标系下一条直线上的任一点的都有相同的斜率和截距,所以在参数坐标系中用一个点来对应。因此,将原始坐标系所有的点都映射到参数坐标系,若存在聚焦点,则该聚焦点对应了原始坐标系下的某条直线。
3.5 边界曲率计算
经过Hough变换后会得到许多边界曲线直线的投票,将投票值排序,依次遍历这些值。当某个点的投票值小于前一个点投票值的一个阈值(本文暂定60%),剩余点可以抛弃。最后留下的曲线极为起重机主梁的边界曲线。
最后,用高阶曲线拟合出该边界曲线,计算出各个点的曲率,发现异常曲率即在该点附近出现了局部变形。而曲线的总体曲率与检规对比可得拱度是否符合该安全级别的标准要求。
4 实验
以某港务集团的一台大型门式起重机做实验,如图2所示。图片0、图片1、图片2、图片3即为一组输入的图像,边界曲线如黄色线所示,其中的红点表示曲率异常点即局部变形点。

5 结论
针对起重机械定期检验中碰到的难题,本文结合Canny算子、Hough变换等多种图像处理方法,研究出一种起重机械主梁塑性变形的机器视觉识别算法。实验证明,该算法能够在一定程度上代替人工视觉,可以为定期检验提供技术支持,作为初步判定的依据。文章后续的研究是针对正在运作的起重机械的不停机检验检测。
[1] 徐大力,张明鹤,王建华,沙漫.桥式起重机静态刚性及静载试验中永久变形的测量方法[J].中国特种设备安全,22(19):9 .
[2]马敬勋,夏永海,魏建军,刘昌伟.起重机械承力构件应力集中分析[J].2012,(2):57-58
[3]刘泽,王嵬,王平.钢轨表面缺陷检测机器视觉系统的设计[J]. 电子测量与仪器学报,24(11):1012-1017.
[4] 张震,马驷良,张忠波,刘辉,宫跃欣,孙秋成.一种改进的基于Canny算子的图像边缘提取算法[J]. 吉林大学学报(理学版),2007,(2):244-248.
[5] 刘桂雄,申柏华,冯云庆,胡存银,易静蓉. 基于改进的Hough变换图像分割方法[J].2002,(3):257-260.
