采用三点定位原理的反射镜支撑结构设计*
2012-08-15崔永鹏
崔永鹏,何 欣,张 凯
(中国科学院长春光学精密机械与物理研究所 空间光学部,吉林 长春 130033)
引 言
柔性机构以体积小、无机械摩擦、无间隙、运动灵敏度高等优点得到越来越广泛的应用,在许多任务中能有效地替代常规刚体结构,尤其在航空、航天等领域广泛用于反射镜支撑结构中。柔性支撑单元以牺牲结构的刚度为代价,通过柔性支撑产生较大的变形达到卸载和吸收应变能的目的,通过合理的布置柔性单元可以避免应力通过支撑结构传递到反射镜上,从而保证反射镜光学表面具有良好的成像特性[1-2]。
依据“三点定位原理”,将柔性机构转化成三点定位机构,可实现圆形反射镜的定位和支撑。由于采用3点周边支撑的形式,可将反射镜组件柔头直接与相机机身对接,省略目前常用支撑形式中的反射镜背板,大大降低了反射镜支撑组件的质量。
1 基本原理
1.1 三点定位原理
三点定位原理有两种结构形式[3]:一种是2-2-2的运动学定位方式(如图1(b)所示),是将三个球形结构放置在三个V形槽中,每个V型槽限制2个自由度,达到被固定件的6个自由度定位;另外一种3-2-1的运动学定位方式又称为“Kelvin clamp”(如图1(c)所示),锥窝限制3个平移自由度,V形槽限制2个旋转自由度,平面限制最后1个旋转自由度,实现被固定件的定位。

图1 三点定位原理Fig.1 Principle of three points supported
1.2 柔性机构原理
图2和图3为单板和十字交叉柔性机构原理图,其中图2可实现单方向的位移和转角,图3可实现单轴方向旋转。
根据柔头所需要释放的自由度,将以上两种结构形式进行复合,来设计柔性铰链的结构形式[4]。

图2 单板结构Fig.2 Single-strip cantilever

图3 十字交叉结构Fig.3 Cruciform flexure
2 三点定位原理转化及支撑结构设计
2.1 三点布局
采用3点周边支撑的结构形式,柔头依据三点定位原理的约束形式设计,均匀分布在反射镜周边的3点上,反射镜3个支撑点连接孔的中心线在反射镜中心点处相交,三个柔头的对外连接面在反射镜的周边外侧,可直接与相机机身连接。如图4所示。
2.2 反射镜结构
φ400mm口径的SiC反射镜如图5所示,其采用敞开式三角形孔轻量化形式,轻量化筋的布局方向与支撑点之间的连线方向相同,反射镜厚度为45mm,质量为6.6kg。
由于采用周边三点的支撑结构,所以对反射镜自身的刚度要求较高。通过计算和分析,轻量化孔的边长为50mm时可以满足使用要求,加大轻量化孔会使反射镜刚度下降,反射镜受重力和温度影响时面型变化较大[5];缩小轻量化孔尺寸会造成质量增加。
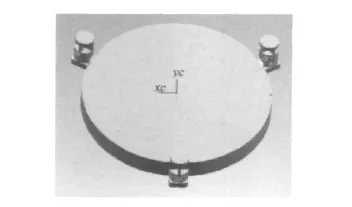
图4 布局及连接方式Fig 4 Support configuration

图5 SiC反射镜Fig.5 The structure of reflected mirror
2.3 定位点设计
依据3-2-1定位方式的三点定位约束形式,设计了3个柔性铰链结构实现三点定位,在不过约束的前提下实现反射镜支撑,并可通过高精度修研实现微应力装配。其中,锥窝点柔性铰链限制三个方向的平移(自身可实现三个方向微量的转角运动);V型槽柔性铰链限制两个旋转自由度(自身可实现3个方向微量的转动及1个方向微量的平移);平点柔性铰链限制一个旋转自由度(自身可实现3个方向微量的转动及2个方向微量的平移)。
柔性铰链结构如图6所示。

图6 柔性铰链结构Fig.6 Flexible link of three points
2.4 柔性铰链设计
单轴柔性铰链根据切口截面形状不同,在力学性能上存在着相应的差异,常用的切口截面形状有矩形、圆形以及椭圆形和双曲线形。
单轴柔性铰链的切口截面为矩形,如图7所示。在力矩M和力F作用下,单轴柔性铰链的转角刚度和位移刚度计算如下:
设θ和y分别为载荷作用下的角位移和线位移,则整个柔性铰链结构在力矩和力作用下的转角和位移分别为:

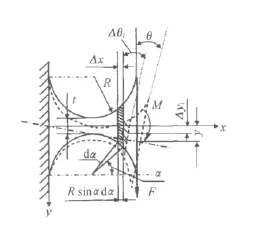
图7 单轴柔性铰链转角刚度计算Fig.7 The rigidity numeration of single-strip flexible link
其中,E为材料的弹性模量,b为柔性铰链的宽度,R为柔性铰链半径,t为柔性铰链最小厚度;θM、yM为柔性铰链在纵向力矩作用下的角位移和线位移,θF、yF为柔性铰链在纵向力作用下的角位移和线位移;KMθ、KMy、KFθ、KFy分别为柔性铰链在纵向力矩和纵向力作用下的角度刚度和位移刚度,其倒数即为对应的柔度。
由式(1)和式(2)知,在力矩作用下的转角刚度和位移刚度分别为:
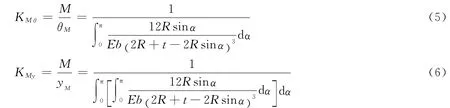
由式(3)和式(4)知,在力作用下的转角刚度和位移刚度分别为:

t值的大小对柔性铰链的转角刚度影响较大,随着t值的增加,转角刚度呈二次曲线增加,而R值的增加,转角刚度减小。R值对柔性铰链转角刚度的影响并不是特别地敏感。
在实际设计过程中,可以根据结构的要求先确定柔性铰链的R值大小,再选择合适的t值,以保证柔性铰链具有合适的转角刚度和位移刚度;柔性铰链参数的选择非常重要,t值选择过大,铰链刚度较大,受力变形较小,会对受力时的反射镜面形产生不良影响;t值选择过小,铰链刚度较小,反射镜组件力学性能下降。通过分析和计算,最终选取R=1,t=2.5作为三个柔性铰链的结构参数。
3 反射镜的分析计算
工程分析采用PATRAN建模,NASTRAN求解,模型构造按如下原则进行:
(1)有限元模型严格按照屏幕样机生成,以保证几何数据与设计结构一致;
(2)在关键的力或热的传递路径上,网格划分要密些;
(3)非关键部位要本着能量等效原则,准确描述其等效单元体的质量、质心位置以及连接刚度,以体现简化后构件能等效真实构件对整机的质量、惯量、热容量和刚度的影响[6]。
反射镜采用SiC材料,外形尺寸为φ400mm×45mm,采用背部敞开式三角形轻量化形式(边长为50mm),筋厚5mm,镜面厚度6mm;柔性铰链采用TC4钛合金材料,其中结构参数选取R=1mm,t=2.5mm。
工程分析工作主要是对支撑结构的动力学频率特性、力和温度变化的影响进行分析,是结构设计合理性、可行性的重要依据[7-9]。
3.1 动力学频率特性、响应特性分析
反射镜组件的模态分析结果见表1,反射镜在一阶、二阶和三阶响应频率下的振型如图8、图9、图10所示。模态是结构的固有振动特性,每一个模态具有特定的固有频率、阻尼比和模态振型,这些模态参数可以由计算取得。

表1 反射镜组件模态分析Tab.1 Mode analysis of reflected mirror
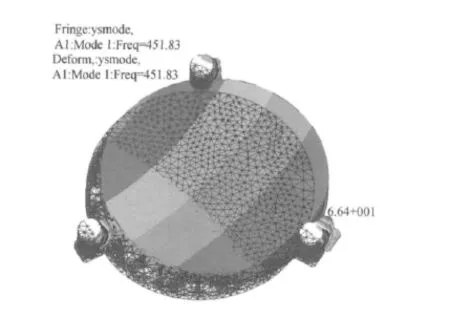
图8 一阶模态Fig.8 First-rank mode

图9 二阶模态Fig.9 Second-rank mode

图10 三阶模态Fig.10 Third-rank mode
3.2 温度环境条件下光学响应分析
通过有限元分析,对反射镜在±5℃温度变化和重力作用下的面形变化进行了分析,见表2和表3。
表2、表3中,PV和RMS表示反射镜面形精度,即为与理想面的偏离值。其中,PV是镜面上最高点和最低点的差值;RMS是镜面上所有高、低点差值的平均值。

表2 5℃温变和重力引起的反射镜面形误差Tab.2 Surface-figure of 5℃rise and weight

表3 -5℃温变和重力引起的反射镜面形误差Tab.3 Surface-figure of-5℃rise and weight
3.3 小结
从数据分析可知,反射镜组件具有高于451.83Hz的一阶谐振频率,高于相机系统基频3倍以上,具有很好的动态刚度。在18±5℃范围内,反射镜的光轴指向倾角和刚体位移均符合光学系统的公差要求,面形变化也在许用范围之内。
4 结 论
综上所述,采用“三点定位原理”设计的3点柔性、周边支撑形式,在合理设计反射镜结构形式、柔性铰链结构参数的基础上能够满足系统对φ400mm口径以下反射镜的力学特性和精度的要求;同时由于支撑结构简单,大大降低了支撑结构的质量,零件加工及装配工艺性良好。
[1]王忠素,翟 岩.空间光学遥感器反射镜柔性支撑的设计[J].光学 精密工程,2010,18(8):1833-1840.
[2]李志来,徐 宏.长条形空间反射镜及其支撑结构研究[J].光学 精密工程,2011,19(5):1039-1047.
[3]GIESEN P,FOLGERING E.Design guidelines for thermal stability in opto-mechanical Instruments[J].SPIE,2003,5176:126-134.
[4]黄金永,魏燕定,张 炜.空间微动平台的柔性铰链参数优化设计[J].机电工程,2006,23(1):55-57.
[5]汪逸群,刘伟,颜昌翔,等.成像光谱仪运动补偿扫描镜的研制[J].光学 精密工程,2011,19(11):2703-2708.
[6]沈丽丽,章亚男.大口径非圆透镜的夹持设计[J].光学仪器,2011,32(5):49-53.
[7]何德威,张志伟,于瀛洁,等.嵌入式结构光投射系统设计[J].光学仪器,2011,33(4):49-54.
[8]辛宏伟,关英俊,李景林,等.大孔径长条反射镜支撑结构的设计[J].光学 精密工程,2011,19(7):1560-1568.
[9]王 智,李朝辉.月基极紫外相机光机结构[J].光学 精密工程,2011,19(10):2627-2633.
