改进的统一Hu 矩在图像目标识别中的应用
2012-08-09董志芳
张 琪,屈 严,董志芳
(东南大学电子科学与工程学院,南京 210096)
当今社会,图像识别与检索已经成为我们正常生活中如影随形的一项技术。但是由于在图像获取及传输过程中的数据丢失,图像一定程度上会发生畸变,故而直接基于灰度图的图像识别早已不能满足当今时代的要求。Hu 于1962年提出了用于区域形状识别的连续函数不变矩[1],不变矩特征由于其在图像平移、伸缩、旋转时均保持不变,而且具有全局特性,已成为图像识别的主要方法之一。但是,在离散状态下Hu 矩的比例不变性并不成立[4],针对这一问题,许多学者进行了相应的研究工作。首先,由Chen 实现了离散状态下的比例不变性[2],但是对边界情况没有考虑;之后,杜亚娟、王波涛、徐学强等人又相继在前人的基础上提出了改善的不变矩算法[3-7],最终将区域、边界和离散状态都考虑在内。但是,徐学强等人的算法在图像识别的效率上具有一定的局限性,因而,我们在文献5 的基础上进行了优化。经过大量的识别实验,结果表明,本文的不变矩算法具有良好的不变性,同时提高了图像在尺度变换中识别率,同时针对图像旋转变换的特点[8],通过引入权向量一定程度上消除了识别的误差,进一步提高了旋转变换后的识别率,是一种更加稳定的不变矩算法。
1 Hu 矩的定义[3-4]
一幅M×N 图像f(x,y)的(p+q)阶原点矩和(p+q)阶中心矩分别定义为:
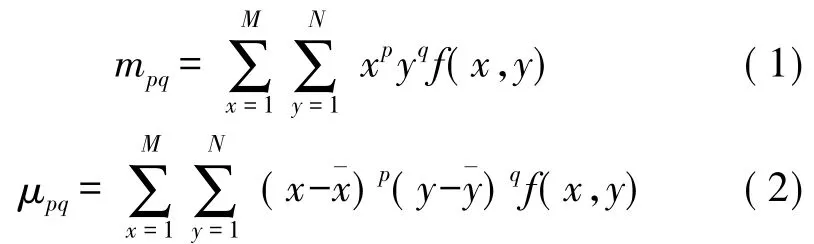
其中,(¯x,¯y)为图像f(x,y)灰度质心。

归一化的中心距定义为:

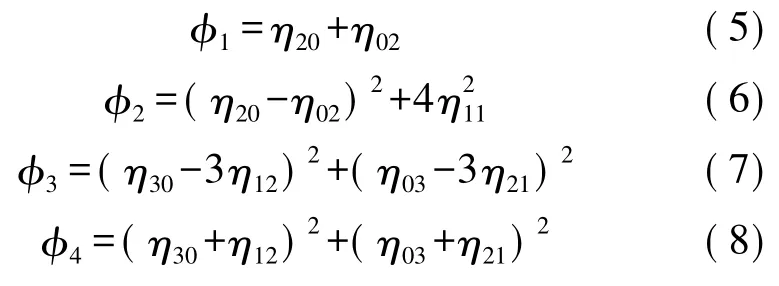
Hu 利用归一化的二阶和三阶中心距构造了7个不变矩函数值式,这7个函数式对于平移、旋转、尺度变换都具有不变性。为了方便计算我们只取前4个不变矩,分别用φ1、φ2、φ3、φ4表示。
2 改进的统一Hu 矩
2.1 改进的统一Hu 矩
文献[5]证明了在离散状态下,Hu 定义的7个不变矩的比例不变性是不成立的。因此需要对Hu进行改进,但该方法在应用中具有一定的局限性,因此我们改进了文献[5]的统一Hu 矩,构造出新的,但同样适用基于区域矩、边界矩、离散状态的归一化中心矩,具体如下所示:
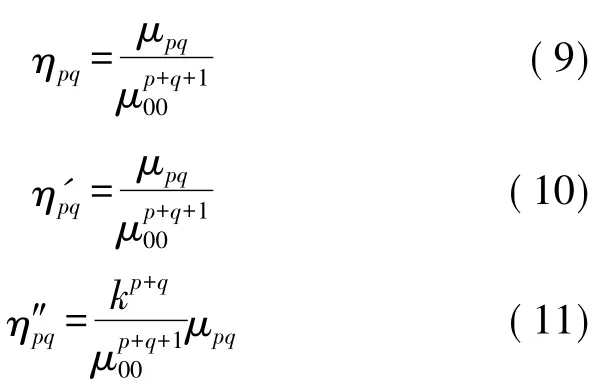
其中k值表征的是尺度变换后新坐标点相对于原坐标点的伸缩的倍率。
根据k值表征的意义,要得到离散状态下不变矩,就必须消去此伸缩倍率。基于这种思想,我们在文献[5]中的统一Hu 矩的基础上,进一步改进的不变矩如下:
可以证明:对于区域、边界、离散的情况,不变矩的公式是统一的,但由于篇幅所限这里不作证明。
2.2 统一Hu 矩的在旋转状态下改进
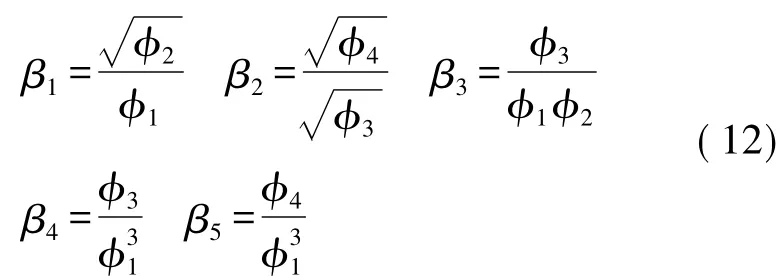
上文已经说明,在区域、边界、离散情况下,不变矩的公式是统一的,于是我们在图像的识别上就不考虑边界效应的影响,因此对于图像的识别就集中在对统一Hu 中5个参数的利用和判别上。
在原点矩和中心距的定义式(1)、式(2)中,图像经过角度θ(初始角度设为θ0,(¯x,¯y)为灰度质心,Δx,Δy 表示待旋转点相对于质心的坐标)的旋转后,新图像变为f(x′,y′),于是我们可以得到:

根据μpq的定义可得:

其中F1=p1×cos(α);F2=p2×sin(α),并合并为F=p×cos(α+φ)。
故μpq将包含有Fp+q+1,Fp+q两项,而μ00则只包含有F 的1 次方项。对于前一项,在归一化中心距的计算中由于和μ00的阶数相同,因而在归一化中心距的计算中会消去,因此不予考虑。对于第二项,在归一化中心距的计算中会留下F-1项,导致后边的计算产生误差。为了消除误差,引入权向量A,根据各矩所需的需消误差来分配权值。

对A* 归一化即可得到权向量A。
在行业交流方面,联盟共举办三届“全国BIM联盟联席会”,邀请各省市BIM联盟参加,通过每年举办一届联席会,加强全国各BIM联盟之间交流;走访联盟观察员单位,与装配式钢结构民用建筑产业技术创新战略联盟进行工作交流;受香港科技大学(The Hong Kong University of Science and Technology, HKUST)和香港建造业议会(The Construction Industry Council,CIC)的邀请参加“全球BIM标准现状”技术论坛。
每个统一矩对于相似度的贡献自然不同,根据实际应用的同一类图像在得到图像旋转各个角度的矩后,除以原图像的各个矩的值进行归一化处理,然后每个矩用最大值减去平均值可以近似的得到a值。于是我们得到了5个a值a1,a2,a3,a4,a5,也得到了向量A*,归一化后得A。
定义图像识别的目标函数为:

S 用以表征图像间的相似度,越小表示相似度越高,识别性越好。
3 实验及结果分析
为了验证改进的统一Hu 矩对图像识别的有效性,我们选用图1所示的4 类图像进行类间图像识别实验,通过比较其目标函数的大小来进行图像识别。每副图又分别经过平移、旋转和尺度变换各产生26副实验样本图像,继而进行类内相似度匹配实验。
图1 四幅不同类型的图像
3.1 类间特征数据分析
图1为4 类样本的基准图,表1 给出了相应的矩不变量,及另外3 幅图与目标图像的相似度比较。
对于目标图像可以选取图像的权向量为:


表1 类间目标特征差异实验数据
分析表1 数据,可以看出,不同图像之间统一Hu 矩的差异明显。由于S 越接近0,相似度越高,G1、G2、G3与目标图像的相似度差异在0.05 以上,完全可以将目标图像从其他图像中识别出来。
3.2 类内特征数据分析
采用了图1 的目标图像进行识别实验。每一种基准图像分别以旋转,平移和尺度变换产生3 组图像,共计26 副图像。目标图像经过平移、旋转和尺度变换后相似度检测,得到表2。

表2 目标图像在平移、旋转和尺度变换后的相似度比较
当相似度阈值设定为0.015 时,有5个没有识别出来,识别率为80.76%。当相似度阈值设为0.025 时,26个样本中仅有一个样本没有识别出来,识别率为96.15%。另外,在尺度变换中相似度S值在0.01 以下,具有很好的识别效果,经分析得到是对统一Hu 矩φ3改进后的效果。
3.3 改进前后识别率的比较
为了对比改进后的效果,我们做出下表来进行说明。
在0.025为阈值的条件下的识别度见表3。

表3 阈值为0.025 时的识别百分比
在0.015为阈值的条件下的识别度见表4。

表4 阈值为0.015 时的识别百分比
通过对比可以发现,改进后的算法在图像旋转和尺度变换的识别上有很大幅度的提高,其中尺度变换的矩不变性在实验中很好的表现了出来。
4 结语
本文对离散状态下归一化中心距和统一Hu 矩进行了改进,使得在尺度变换中统一Hu 矩的识别率显著提高,并证明了改进后的统一Hu 矩同样具有区域、边界、离散状态下的不变性。但同时发现了其对于旋转的识别效果仍需提高,所以经过误差分析后提出了权向量的改进方法,大幅度提高了图像经过旋转变换后的识别率,具有更好地应用前景。
[1]丁明跃.不变矩算法研究[J].数据采集于处理,1992,7(1):1-9.
[2]Chen C C.Improved Moment Invariants for Shape Discrimination[J].Patten Recognition,1993,26(5):683-686.
[3]杜亚娟,潘泉,张洪才.一种新的不变矩特征在图像识别中的应用[J].系统工程与电子技术,1999,21(10):71-74.
[4]王波涛,孙景鳌,蔡安妮.相对矩及在几何形状识别中的应用[J].中国图像图形学报,2001,6(3):296-300.
[5]徐学强,汪渤,贺鹏.统一Hu 矩及在电视图像目标识别中的应用[J].计算机工程与应用,2006,29:213-214.
[6]肖家庆,卢凌,李晟,等.基于矩不变量的图像识别[J].武汉理工大学学报,2006,30(4):696-699.
[7]柳林霞,陈杰,窦丽华.不变矩理论及其在目标识别中的应用[J].火力与指挥控制,2003,28(2):13-14.
[8]程波,杨阳,沈田双.一种基于不变矩和SVM 的图像目标识别方法[J].仪器仪表学报,2006,27(6):2093-2093.
