基于SolidWorks环境的可转位车刀快速参数化建模技术研究
2012-08-07徐林红邓安艺
谭 昕,徐林红,邓安艺
(1.江汉大学 机电与建筑工程学院,湖北 武汉 430056;2.中国地质大学 机械与电子信息学院,湖北 武汉 430074)
基于SolidWorks环境的可转位车刀快速参数化建模技术研究
谭 昕1,徐林红2,邓安艺2
(1.江汉大学 机电与建筑工程学院,湖北 武汉 430056;2.中国地质大学 机械与电子信息学院,湖北 武汉 430074)
在可转位车刀的三维参数化建模过程中,车刀刀槽的三维设计通常是在SolidWorks环境下通过反复、烦琐的拉伸切除命令实现,其效率低、容错能力差。通过对可转位车刀刀槽几何角度、刀片几何角度与车刀角度之间转换关系的推导和分析,并根据刀具头部形式的结构特点进行分类,在此基础上,在SolidWorks环境下运用Visual Basic二次开发工具开发了可转位车刀的参数化建模软件包,通过刀尖点定位,利用布尔实体运算快速实现刀槽的三维建模;通过交互界面的参数输入可实现可转位车刀的快速装配与仿真。
可转位车刀;参数化设计;二次开发
1 可转位车刀的几何参数
1.1 可转位车刀的角度组成
由可转位车刀的结构特点,其几何角度是由刀片的几何角度和刀杆槽的几何角度共同组合而成。如图1所示为可转位车刀的角度组成[1]。

图1 可转位车刀的角度组成
其中刀片角度有:刀片法前角γnb、刀片法后角αnb、刀片刃倾角λsb、刀片刀尖角εrb。
车刀的独立角度有:前角γ0、后角α0、主偏角κr、刃倾角λs。
刀槽的独立角度有:刀槽前角γog、刀槽刃倾角λsg、刀槽主偏角κrg、刀槽刀尖角εrg。
1.2 可转位车刀设计过程中角度的计算
在可转位车刀设计中通常是根据车刀所要求的几何角度和标准刀片的几何角度,求刀槽的几何角度,并对计算出来的结果进行检验[2]。
1)车刀设计计算参数:κr、λs、γ0、εr。
2)标准刀片参数:γnb>0、αnb、λsb、εrb。
3)常用的刀片αnb=0、λsb=0,对应的刀杆通常设计成κrg=κr、λsg=λs、εrb=εr。
4)刀槽几何角度的计算。
刀槽主偏角:κrg=κr;刀槽刃倾角:λsg=λs;
刀槽前角:
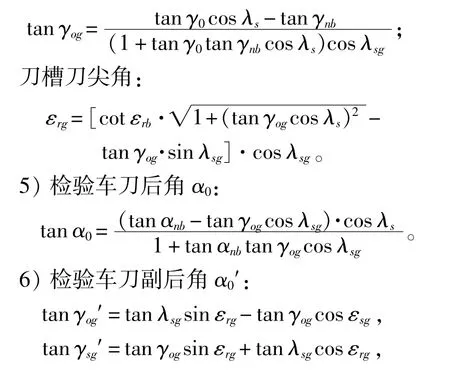

一般α0′的最小值应大于2°~3°。当刀片法前角γnb>0、刀片法后角αnb=0时,由计算可知,车刀的刃倾角λs(λsg)需取负值。
2 可转位车刀种类及其尺寸
根据可转位车刀头部结构,可转位车刀可分为直头式和偏头式;按进给方向,可转位车刀可分为侧切和端切。
直头式刀杆主偏角κr小于或等于90°、f小于b。按刀杆的方向与车刀进给方向的关系,将偏头形式的可转位车刀划分为偏头端切及偏头侧切。与直头式可转位车刀相比,偏头式刀杆的刀头部分相对于刀杆宽度有一定的偏移量,主偏角的大小关系:0°<κr<180°。偏头端切的可转位车刀进给方向与刀杆长度方向相同[3]。
可转位刀片是各种可转位刀具的最关键部分,正确选择和使用可转位刀片是合理设计和使用可转位车刀的重要内容。可转位刀片已标准化,按形状将可转位刀片划分为:正三角形、菱形、正方形、80°等边六边形、带偏8°的三角形等[4]。
3 可转位车刀参数化建模
3.1 可转位车刀模型的参数化设计
可转位车刀是由刀杆、刀片、垫片及夹紧元件装配而成。其中刀杆为主体,刀片及垫片套装在夹紧元件上,通过夹紧元件使刀片与垫片固定在刀杆上的刀槽中,从而组成可转位车刀。由可转位车刀的组成及结构,对于可转位车刀参数化建模,就是建立4个参数化模型:已切出刀槽的刀杆、刀垫、刀片和夹紧元件。将建立好的4个模型装配,从而完成可转位车刀模型的参数化设计。
1)刀杆的参数化建模需要选择头部形式,按不同的头部形式建立参数化模型。
2)刀片参数化模型建模的主要参数:内切圆直径d、孔径d1、刀片厚度s、圆角半径r、法前角、法后角、刃倾角、刀尖角。一般刀片法后角取为0°、刃倾角也取为0°,刀片带前角但刀片前面未切出。
3)垫片参数化建模:在可转位车刀模型中,垫片和刀片外部轮廓相同。
3.2 刀杆槽参数化建模
可转位车刀的空间几何角度关系复杂,刀槽参数化建模是可转位车刀建模中的难点。完成刀杆模型的建立后,根据车刀角度关系,切出车刀前面,再切出主、副后面,最后调用或重新绘制刀片切块(不同于刀片),通过布尔减运算(即组合减命令),切出刀槽。具体过程如下:
前刀面:前刀面在空间位置是一个斜面。由可转位车刀角度关系,在已知刀槽前角、刃倾角、刀槽刀尖点的基础上,就可以确定前面。在SolidWorks中,通过特征移动复制中的旋转实体命令以及组合相减命令以新建圆柱体切出前面。
在图2中,要将斜平面ABCD(AEF)转成与平面EOF平行的正平面,由空间几何学,首先将实体绕oy轴或其平行轴旋转ax角度,其次绕oy轴或其平行轴旋转复合角Wy角度。由可转位车刀的几何角度关系,将其与上图结合,将主切削刃当成线段CD,则ax等于刃倾角、ay等于刀槽前角,刀尖点的位置由刀杆尺寸确定。旋转主切削刃与X轴平行,利用组合减命令,切出前刀面。
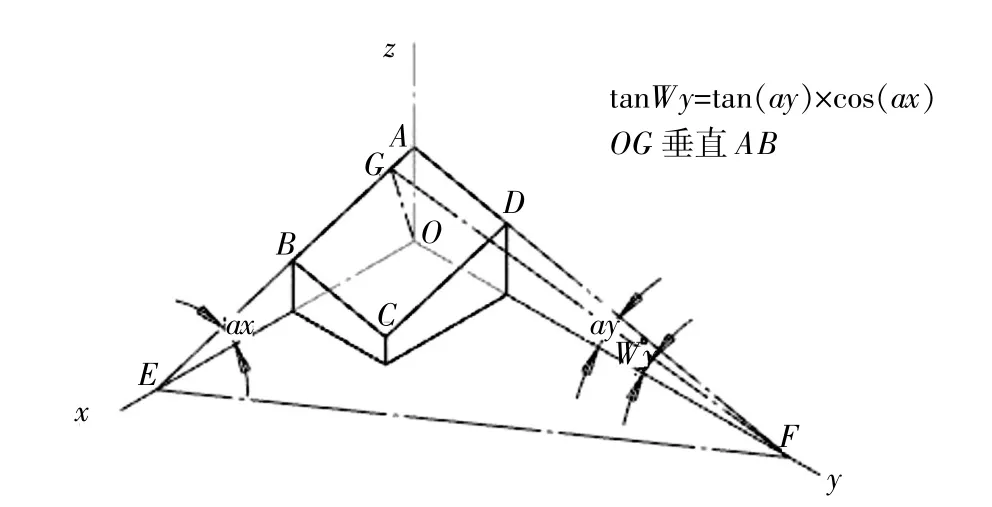
图2 前刀面位置坐标
主、副后面:可转位车刀后面一般与刀片对应的面平行,并具有相等的悬升量,在 Solid-Works中用刀片实体的后面分割刀杆,就能切出车刀后面。
刀槽:刀槽是安装刀片和垫片的,其形状与刀片相同。在SolidWorks中可以利用刀片模型切出刀槽。通过将刀片实体进行上下移动(即y轴移动),获得刀槽深度参数变量,x轴和z轴的平移获得刀片安装位置,最后组合减即可,从而完成刀槽模型的建立。
3.3 可转位车刀的虚拟装配
可转位车刀采用自下而上的装配方法,以刀杆槽零件为第一个装配零件并固定刀杆。由可在转位车刀的组成关系,先插入垫片并与刀槽配合;然后插入圆柱偏心销并与垫片配合;最后插入刀片零件并与垫片和刀槽配合定位(见图3)。
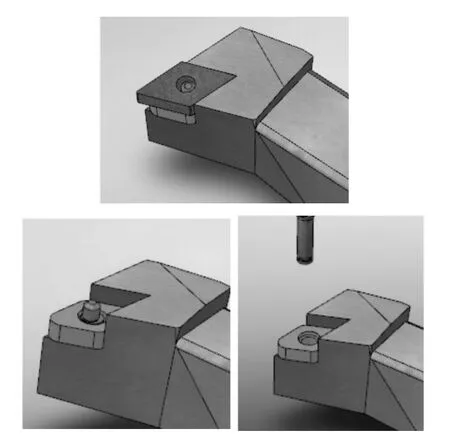
图3 可转位车刀的虚拟装配
4 可转位车刀快速建模软件实现
本研究利用SolidWorks软件所带的Visual Basic接口进行可转位车刀参数化建模的软件包编程。软件包有两种可视化界面,其一为程序功能主界面,其上可选择刀片、刀杆、夹紧元件等子功能项;另一个界面是模型参数界面,负责各子项功能的具体参数输入。在各子项参数输入完成后,可转位车刀的三维模型建立、显示与输出则由SolidWorks软件的Parasolid核心完成[5]。
本程序实现了6种模型建模:可转位车刀、刀杆、刀杆槽、刀片、垫片以及圆柱偏心销。不同实体模型的建立对应不同的建模命令按钮,在VB程序编写中,使用6个主函数,通过调用参数变量等子函数或调用其他主函数实现该主函数的功能,如可转位车刀建模主函数调用了刀杆槽、刀片、垫片等主函数[6]。
4.1 程序功能主界面
可转位车刀是由刀杆、刀片、垫片及夹紧元件装配而成。程序主界面菜单实现了用户需要建立模型的选择,包括可转位车刀、刀片、垫片、刀杆槽、刀杆及圆柱偏心销模型的选择和程序使用说明。图4所示为可转位车刀模型窗口。程序设计功能是实现用户通过程序主界面上级菜单选择需要利用程序生成的模型,点击生成该种实体模型所需的参数菜单,输入参数并检查参数的完整性以及正确性后,点击对应的建模命令按钮,在SolidWorks中就能显示用户输入参数所对应的三维实体模型。

图4 可转位车刀模型窗口
图4所示界面窗口左侧按钮菜单为程序实现可转位车刀模型必要的参数选项的显示。要建立可转位车刀模型,需要输入刀杆参数、刀片参数、垫片参数、车刀角度、夹紧元件选项下的参数。
在主界面中,除了可转位车刀模型窗口外,还有刀杆、刀杆槽、刀片、垫片以及圆柱偏心销模型窗口,每个模型窗口左侧栏都有所选模型所需的参数选项。
4.2 模型参数界面
图5所示为可转位车刀建模过程中的刀杆参数输入窗口。
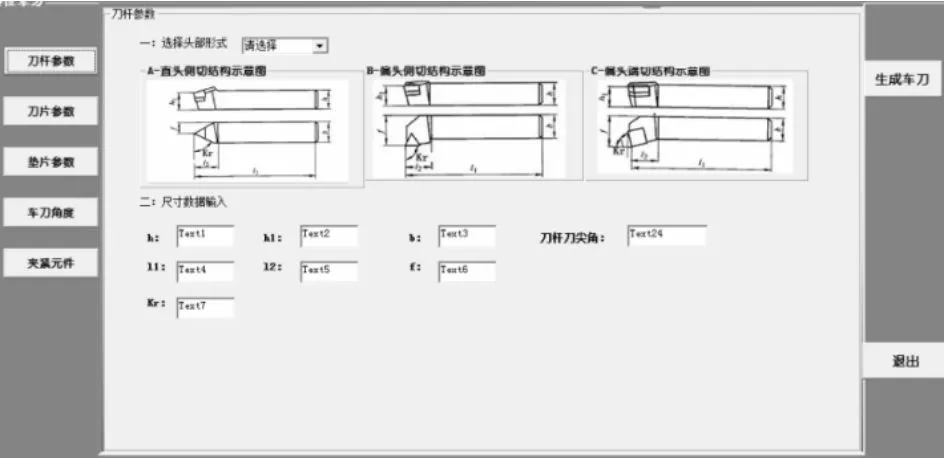
图5 刀杆参数输入窗口
如图5所示,建立可转位车刀模型需要的参数选项除了刀杆参数外,还有刀片参数、垫片参数、车刀角度、夹紧元件。建立其他零件模型时也是上述几项参数选项中的一项或几项,在本程序中,共有上述5个独立的参数输入窗口。如图6所示为车刀角度输入窗口,部分完成的刀槽模型如图7所示。

图6 车刀角度输入窗口

图7 刀槽的三维参数化模型
5 结语
笔者介绍的软件包在研究可转位车刀角度、刀槽角度及刀片角度之间的关系基础上,利用SolidWorks三维建模软件,通过输入车刀角度,利用三维刀片模型在刀杆上进行布尔运算快速切出刀槽的三维几何形状,从而避免了传统刀槽建模中的烦琐。同时实现了可转位车刀上其他元件的参数化建模及可转位车刀的自动装配,大大提高了可转位车刀的三维参数化建模效率,为可转位车刀的数字化设计提供了一种有效的方法。
[1]邹平.可转位车刀刀槽的几何角度[J].机械工人:冷加工,1993(7):10-11.
[2]袁剑.可转位车刀刀片槽的铣削方法[J].机械工程师,2009(6):127-128.
[3]彭林中,张宏.机械切削刀具及应用速查手册[M].北京:化学工业出版社,2008.
[4]袁哲俊,刘华明.车刀和刨刀:金属切削刀具设计手册[M].北京:机械工业出版社,2009.
[5]殷国富,徐雷,胡晓兵.SolidWorks2007二次开发技术实例精解[M].北京:机械工业出版社,2007.
[6]周霭如,林伟健,官士鸿.Visual Basic程序设计[M]. 2版.北京:电子工业出版社,2007.
TAN Xin1,XU Lin-hong2,DENG An-yi2
(1.School of Electromechanical and Architectural Engineering,Jianghan University,Wuhan 430056,Hubei,China;2.Faculty of Mechanical and Electronic Information,China University of Geosciences,Wuhan 430074,Hubei,China)
In general 3D modeling methods of indexable turning tools,the parameterized models are created by repeatedly using extrude and cut instructions in the software SolidWorks. Introduces a rapid method for parameterized modeling of indexable turning tools.Firstly,the relations of geometry angles between grooves and cutter bars are seriously deducted.Then the cutters are classified according to their heads.Finally,a package of computer programs is developed by Visual Basic programming in SolidWorks.The special package of computer programs can realize the functions of rapidly assembling and parameterized simulation.
indexable turning tool;parameterized design;secondary development

TG659
:A
:1673-0143(2012)03-0069-04
(责任编辑:陈 旷)
2012-05-14
谭 昕 (1972—),男,副教授,博士,研究方向:复杂成型原理齿轮数据加工、机械传动和机械系统动力学。
