光伏与微型燃气轮机混合微网能量管理研究
2012-08-07周念成王强钢李春艳
周念成 邓 浩 王强钢 李春艳
(重庆大学输配电装备及系统安全与新技术国家重点实验室 重庆 400044)
1 引言
随着新能源发电的推广和应用,微网技术已经成为研究热点。微网是指由分布式电源(DG)、储能装置及负荷组成的独立可控系统,并且就地提供电能和热能[1]。微网中的微型电源包括风力发电机(wind generator)、光伏电池(PV panel)、微型燃气轮机(micro-turbine)及燃料电池(fuel cell)等。其中,光伏发电以资源丰富、分布广泛、清洁等特点成为最具开发潜力的可再生能源之一[2]。由于光伏发电具有明显间歇性,输出功率受天气变化影响大,为了提高光伏发电的可靠性,减小并网时对大电网的影响,需要加入可控微源或分布式储能与光伏发电互补形成混合微网[3-6]。文献[3]建立了含光伏阵列及燃料电池的微网模型,对光伏与燃料电池混合微网动态特性进行仿真分析;文献[4]基于双输入Buck变换器提出了一种氢光联合供电系统的能量管理控制策略,以实现光伏发电与燃料电池混合系统的能源优化利用;文献[5]设计了光伏与燃料电池混合并网发电系统模型的恒功率控制(unit power control)和馈线功率控制(feeder flow control)两种运行模式,提出采用滞环方式灵活切换混合电源运行模式。为减小光伏与柴油发电孤立供电系统中光伏出力波动引起的系统频率偏差;文献[6]采用模糊推理方法协调多个光伏发电系统的出力,以平滑光伏发电系统的功率波动。与上述微源相比,微型燃气轮机能同时供应冷热电负荷,具有排放少、效率高、燃料适应性好和便于灵活控制等优点[7-9],已成为冷热电联供微网中最有发展前景的分布式电源,因此有必要研究光伏与微型燃气轮机组成的混合微网运行特性和能量管理。
光伏与微型燃气轮机混合微网中光伏发电系统的出力波动具有随机性,而微型燃气轮机动态响应速度较慢,具有十秒到几十秒的延时[8-9],须配合蓄电池保证微网在各种运行状态可靠供电。为抑制功率波动和减少蓄电池容量,混合微网能量管理中须引入实时负荷预测[10-12]。利用预测算法的超前时间量,可克服微型燃气轮机响应速度慢的缺点,实现微网稳定运行和高效能量管理。本文建立了光伏发电和微型燃气轮机动态模型,采用变步长时间序列法预测微网中光伏与负荷的等效负荷曲线,超前调度微型燃气轮机出力,以平抑光伏和负荷的功率波动。由于研究中主要针对微型燃气轮机与微网的电力交换问题,因此微网本地负荷仅考虑电力负荷。为了合理分配蓄电池的运行时间,提高蓄电池充放电效率,提出了一种多组蓄电池结构的模块化能量管理模式,利用PSCAD/EMTDC和Matlab联合仿真验证了所提出方法的正确性。
2 混合微网模型及特性分析
2.1 混合微网的结构
光伏与微型燃气轮机混合微网结构如图1所示,混合微网经公共连接点(PCC)接入配电网。为便于微源的扩展及提高供电可靠性,微网采用交流母线连接方式。其中光伏发电系统采用单级逆变结构,光伏阵列经过光伏逆变器及隔离升压变压器接入微网;微型燃气轮机采用单轴结构,燃气涡轮与永磁同步发电机(PMSG)同轴相连,高速同步发电机输出高频交流电能,经整流逆变后与交流母线相连;分布式储能(distributed storage)采用蓄电池,两端并联电容以改善蓄电池动态响应能力[13],通过接口变流器实现有功的双向流通。
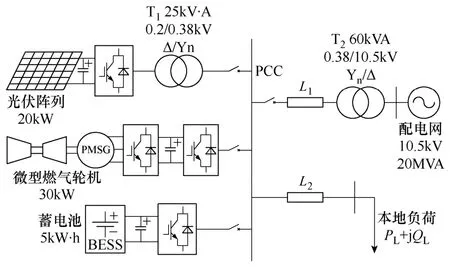
图1 光伏与微型燃气轮机混合微网结构Fig.1 Structure of PV and micro-turbine hybrid micro-grid
2.2 光伏发电模型及特性分析
光伏发电模型由光伏阵列和逆变器组成,光伏阵列由若干光伏电池组件串并联构成。如图2所示可采用受控电流源作为模型[14-15],图中S和T分别为光照强度和光电池温度,VA和IA分别为光伏阵列端电压和输出电流,Rs和Rsh分别为光伏阵列等效串联和并联电阻,IL为光电池组件短路电流,I0为二极管饱和电流。串联NS和并联NP个光电池组件的光伏阵列输出电流IA为

式中,n为结常数,n=1.5;q=1.6×10-19C为库仑常数;k=1.38×10-23J/K为玻耳兹曼常数。光电池组件短路电流IL取决于光照强度S和温度T,而二极管的饱和电流I0仅与温度T有关,即

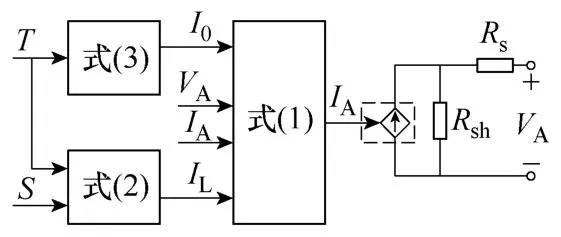
图2 光伏阵列模型Fig.2 Model of PV array
光伏发电系统的控制结构如图3所示,图中最大功率点跟踪(MPPT)模块生成光伏阵列直流电压参考值Vdcref,经功率控制模块的比较器和PI环节生成交轴电流参考值ipvqref;功率控制模块采用功率外环dq解耦控制,直轴电流参考值ipvdref由无功偏差信号Qpvref- Qpv经PI控制生成,再由直接电流控制内环跟踪电流参考值。本文采用电导增量法实现光伏阵列最大有功功率的跟踪[15],其通过比较光伏阵列的瞬时电导和电导变化量,实时计算直流参考电压。

图3 光伏发电系统控制结构Fig.3 Control scheme of PV generation system
光伏阵列输出功率取决于光照强度和光电池温度,图4为某地区光伏电站5月份三种典型天气的光照强度和环境温度,下标sunny、cloudy和rainy分别表示晴天、晴转多云和雨天。根据实测光照和温度数据进行仿真(参数见附录),可得到采用最大功率跟踪控制策略时光伏发电系统的有功功率波形如图4c所示。由于光照强度随时间和天气等因素变化不是一个稳定值,光电池温度除了受环境温度影响外,还与光电池损耗发热有关,因而光伏发电系统的输出功率随着光照强度和温度波动变化。

图4 某地光照强度、环境温度和光伏输出功率曲线Fig.4 Light intensity,ambient temperature and output power curve of PV in someplace
2.3 微型燃气轮机发电模型及特性分析
微型燃气轮机发电系统由微型燃气轮机、永磁同步发电机和双脉宽调制(PWM)控制电力电子接口构成。假定微型燃气轮机工作在额定转速附近,忽略燃烧时延时环节和回热器惯性作用,简化后的微型燃气轮机动态模型如图5所示[9-16]。其中排气口温度函数 f1和涡轮转矩输出函数 f2分别为

式中,Tref为温度参考值;u1为排气口温度;ω为发电机转速;u2为进入涡轮的燃料流量。
温度和转速控制模块分别产生两种燃料指令FT和Fω,通过低值门作用后产生最终的燃料参考指令送入燃料系统,最后由压缩机涡轮系统输出机械转矩,不经齿轮变速直接驱动永磁同步发电机,图5中Fmin=0.23为空载时燃料系统的最小燃料流量,涡轮转速ω由永磁同步电机测量得到。由于未研究微型燃气轮机的开停机过程,故忽略加速度控制模块;转速控制环节是微型燃气轮机在负荷变化时的主要执行机构;温度控制作用为限制燃料的输入量来保护系统温度不超过限定值。

图5 微型燃气轮机模型Fig.5 Model of micro-turbine
单轴结构的微型燃气轮机须经整流和逆变两级电力电子变换后接入微网,采用双脉宽调制控制交直交电压型变流器,控制结构如图6所示。图中电机侧和电网侧变流器均采用同步旋转dq坐标系PI控制,利用功率外环PI调节生成参考电流dq轴分量,再由内环电流反馈及补偿控制使dq轴电流跟踪参考值。电流内环设置电流解耦补偿将电流反馈线性化,引入电压前馈补偿减少电压扰动对控制系统的影响。电机侧整流器控制目标为维持直流电压,变流器参考电流d轴分量imdref设定为0;电网侧逆变器采用PQ控制以实现微型燃气轮机功率调节。
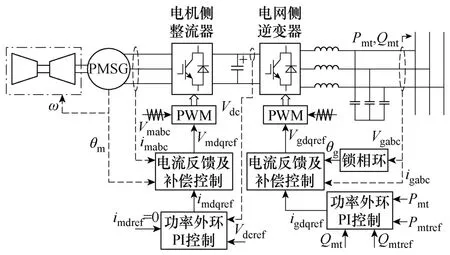
图6 微型燃气轮机发电系统控制结构Fig.6 Control scheme of micro-turbine generation system
图7显示了微型燃气轮机发电系统的负荷阶跃变化响应特性(参数见附录),负荷每20s阶跃变化50%从满载到空载再到满载。图中给出了燃料流量Fuel、转速ω 和输出功率P的变化曲线,微型燃气轮机空载时燃料流量为 Fmin。可以看出,直流侧不配置储能设备的微型燃气轮机发电系统功率调节具有10s左右的延迟,不能响应快速负荷变化,故微型燃气轮机孤岛运行时,需要配置储能设备来改善动态性能。本文在混合微网中配置蓄电池作为微网的分布式储能,经电力电子接口直接并入微网交流母线,以便于微网的模块化设计和规模扩展。
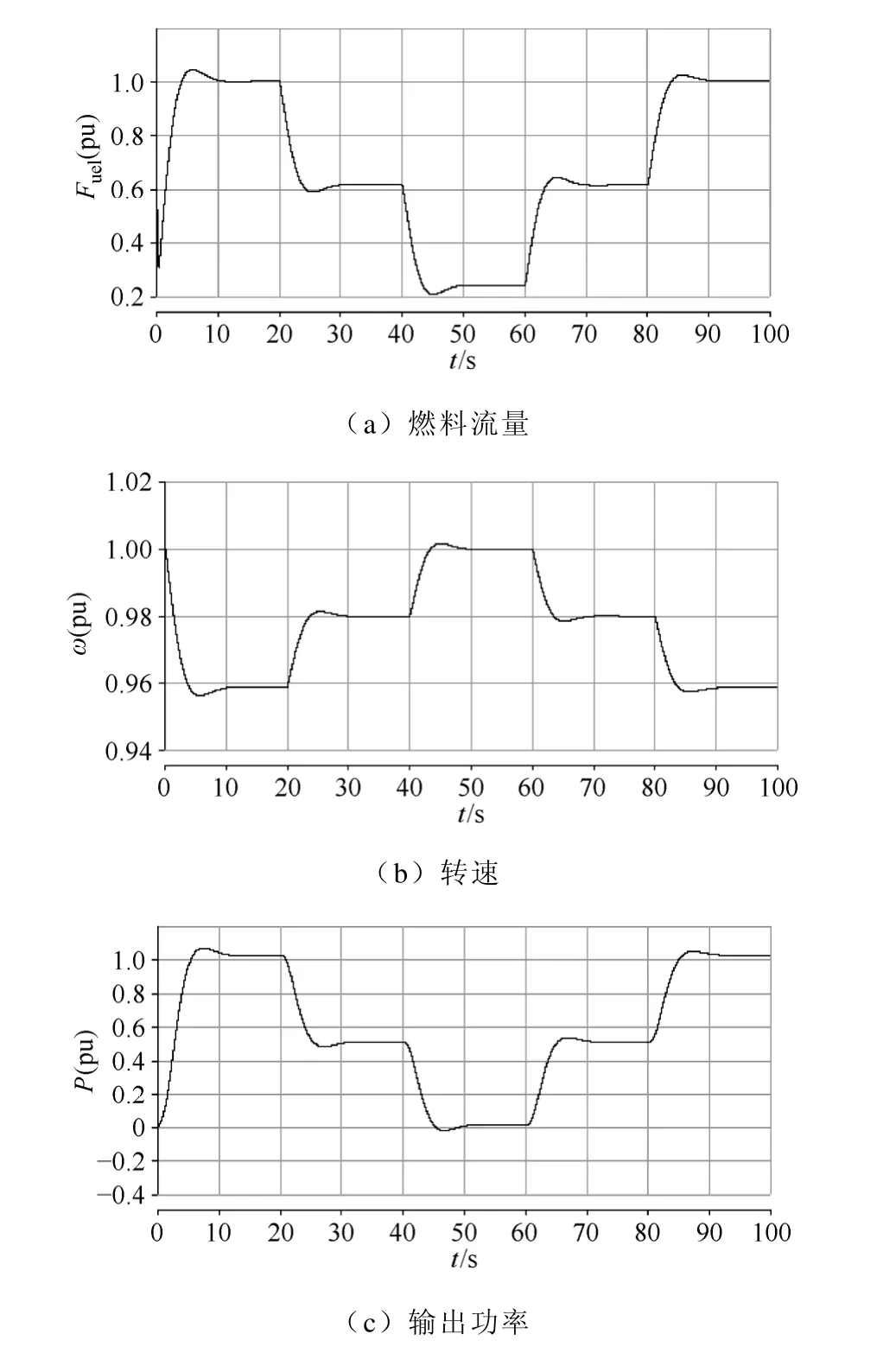
图7 微型燃气轮机发电系统负荷响应特性曲线Fig.7 Load response curve of micro-turbine generation system
3 变步长时间序列的负荷预测算法
由于时间序列法仅需要前几个时段的功率数据,便于考虑突发事件对负荷影响加以修正,因此采用时间序列法预测微网中光伏与负荷的等效功率曲线。改进欧拉型移动平均预测算法(Modified Euler type Moving Average Prediction, EMAP)能对超前时间量为Tp的慢动态DG的功率参考值进行预测,已应用于光伏发电系统的负荷预测[10-11]。设有N个采样点x(k),x(k-1),…,x(k-N+1),采样周期为Ts,则下一个时间间隔的EMAP预测值为
式中,ωi为权重系数;预测时间超前量 Tp=(L-1)Ts/2+τ;L为步长;τ为慢动态DG的功率响应延时。EMAP预测算法把N个采样点按顺序分M区,将M-1个相邻两区数据平均值之差乘以权重系数ωi求和,除以 (N/M)Ts得到单位时间间隔的预测功率变化率 dyEMAP(k),再将 dyEMAP(k)乘以 Tp然后叠加 MA算法预测值即得到超前时间为 Tp的预测值。EMAP算法的z域模型如下:
文献[10]在N个采样点顺序分区时采用等间隔分区方式,取ωi=2(M-i)/(M2-M),i=1,2,3,··,M-1;文献[11]则采用变间隔的方式分区,改进了对功率变化率 dyEMAP(k)的预测。图8为典型的晴天、晴转多云和雨天光伏与负荷(负荷数据见图13a)综合功率Peq=Pload-Ppv的频率特性曲线,可见雨天和晴天的等效负荷功率频率分布基本相似,图中区域B为晴转多云天气相对于其他两种天气增加的0.02~0.06Hz高频分量。
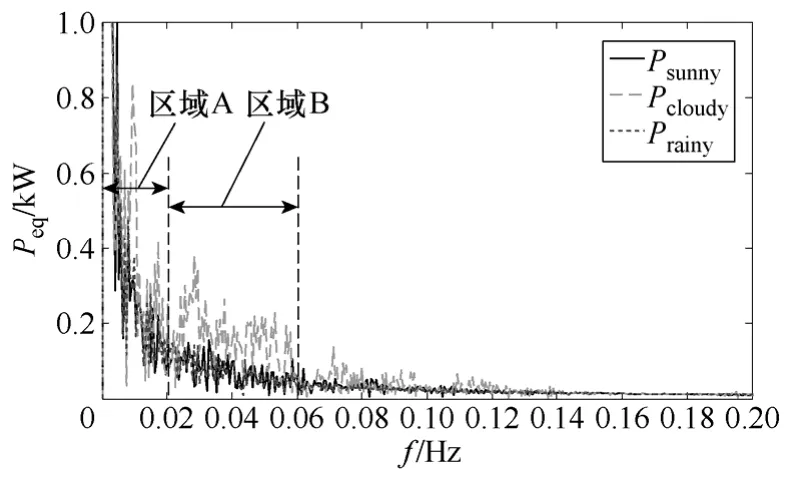
图8 光伏与负荷综合功率频率特性Fig.8 Frequency characteristics of equivalent power of PV and load
设微型燃气轮机延时τ =10s,采样周期Ts=0.5s,采样点数N=600,分区数M=12,可得移动平均步长L 取不同值时,EMAP算法的幅值和相位频率特性如图9所示。由图可见,根据天气预报情况变化EMAP的移动平均步长L,能够改进预测算法对不同天气情况的适应性,改善EMAP算法的预测性能。本文针对晴转多云天气减小移动平均步长L,提高式(6)中近期负荷数据的预测权重,增大EMAP算法在0.02~0.06Hz高频段的幅值,在采用EMAP算法超前调节微型燃气轮机出力的同时,加强算法对光伏出力变化频繁的晴转多云天气的预测效果。

图9 EMAP预测算法频率特性比较Fig.9 Frequency characteristics comparison of EMAP prediction algorithm
4 混合微网能量管理策略
4.1 能量管理策略及模块化蓄电池管理
光伏与微型燃气轮机混合微网并网运行时,采用联络线功率控制方式,使微网作为独立可控单元,光伏发电系统处于MPPT模式,通过EMAP预测算法提前调度微型燃气轮机出力,可克服微型燃气轮机响应速度慢的缺点,减小微网注入配电网功率的波动,此时蓄电池充、放电系统处于备用状态。微网与配电网联络线功率参考值可根据日电价波动曲线由微网运营商和电网企业制定联络线的日功率调度曲线,进行混合微网并网时的功率管理[17]。
孤岛运行时,微型燃气轮机与蓄电池共同补偿光伏与负荷功率差额,微型燃气轮机承担慢速变化功率,蓄电池承担快速变化功率,采用预测方式超前调节微型燃气轮机出力,能有效减小蓄电池的配置容量。图10为光伏与微型燃气轮机混合微网的能量管理结构图,图中由PCC处的静态开关BR来实现微网的并网和孤岛模型的切换。为了合理分配蓄电池的运行时间,提高蓄电池充、放电效率,储能蓄电池采用模块化管理。

图10 光伏与微型燃气轮机混合微网能量管理结构图Fig.10 Energy management structure of PV and micro-turbine hybrid micro-grid
图10中蓄电池的电力电子接口采用双变流器结构[18],其中PQ控制器结构与图6中电网侧逆变器控制方式相同,V/F控制器采用定电压和定频率控制[19]。将蓄电池阵列分成4组,按功率调节作用分为能量备用和功率补偿两个状态,通过直流开关切换至PQ控制和V/F控制变流器直流侧。图11为蓄电池直流开关柜结构图,开关投切控制器根据蓄电池能量管理器的指令,动作开关柜中S1~S4的直流开关,实现蓄电池阵列的模块化管理。
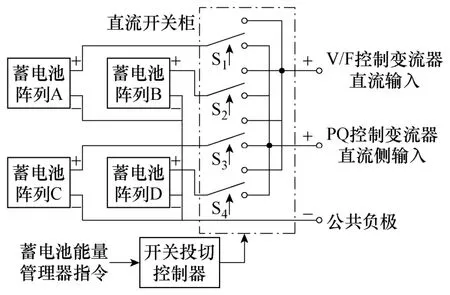
图11 蓄电池直流开关柜结构图Fig.11 DC switchgear structure of battery
4.2 并网运行
为提高蓄电池的使用寿命和运行可靠性,微网并网时由配电网平抑微型燃气轮机的功率调节误差,蓄电池充放电系统处于备用状态。微型燃气轮机根据光伏发电系统的出力历史采样数据Ppv,结合微网与配电网联络线的功率参考值 Pgref,利用前述的EMAP算法考虑功率调节时延预测微型燃气轮机的功率参考值Pmtref进行超前功率控制。
并网运行时蓄电池V/F控制变流器处于闭锁状态;PQ控制变流主要用于备用蓄电池的充电,此外还可以对蓄电池进行定期的放电性能测试。选取 3组蓄电池阵列作为能量备用蓄电池,由 PQ控制变流器充满电以待微网孤岛运行时使用;预留1组蓄电池阵列用于微网孤岛时补偿动态响应缓慢的微型燃气轮机功率调节误差,平滑光伏和负荷功率的快速变化。
4.3 孤岛运行
由于微型燃气轮机的动态响应速度缓慢,光伏与微型燃气轮机混合微网孤岛运行时,失去大电网的电压和频率支持,蓄电池的V/F控制变流器开始运行,为孤岛微网提供电压和频率支撑,快速补偿混合微网中光伏与负荷的功率变化。此时微型燃气轮机仍采用超前预测 PQ功率控制,作为孤岛微电网负荷供电的主要能源形式。孤岛时蓄电池 PQ控制变流器处于闭锁状态,其能量管理器通过检测V/F变流器直流侧蓄电池阵列的电压和电流,利用蓄电池的三阶模型[20]在线监测功率补偿状态的蓄电池荷电状态(State of Charge, SOC),控制直流开关投切将并网时已充满电的能量备用蓄电池逐个切换至功率补偿状态。
蓄电池阵列状态切换规则如下表所示,并网运行时蓄电池阵列A、B和C处于能量备用状态,微网转入孤岛后蓄电池阵列C和B依次切换到功率补偿状态。为合理分配蓄电池阵列的运行时间,提高蓄电池的使用效率,微网并网重连时备用蓄电池的选择采用轮换制,即孤岛运行结束转入并网时,按投入V/F逆变器直流侧时间的先后顺序,优先选择投入时间靠前的蓄电池作为备用蓄电池。下表中从孤岛运行再重新并入配电网时,由于蓄电池阵列A仍充满电保持备用状态不变,按蓄电池阵列 D、C和B投入V/F变流器侧的时间顺序,选择蓄电池阵列D和C切换至备用状态。

表 蓄电池阵列状态切换规则Tab.State switching rules of battery array
孤岛时一旦光伏发电系统的输出功率大于微网本地负荷,多余的电能经V/F变流器为蓄电池阵列充电。由于微网蓄电池容量配置时,必须选择放电或充电容量中的最大值,为避免蓄电池配置容量按最大充电容量选取,光伏与微型燃气轮机混合微网组网设计时可适当增加本地负荷容量,还有利于提高微型燃气轮机的利用率。
5 仿真分析
在PSCAD/EMTDC仿真平台中建立图1所示的光伏与微型燃气轮机混合微网仿真模型,并在Matlab中实现前述的能量管理策略,组建图 12所示的联合仿真系统。仿真模型中负荷采用受控电流源模拟,负荷有功按图13所示负荷曲线变化,设负荷消耗无功恒定不变,光伏和微型燃气轮机采用前文所述的详细模型;混合仿真中将24h等效成288s进行计算,由于PSCAD/EMTDC单次仿真的数据量有限,本文利用 PSCAD/EMTDC软件的快照(Snapshot)功能分段进行仿真,有效地实现了微网仿真的同时性[21]。针对光伏出力变化较大的晴转多云天气,分析所建的微网模型在全天24h并网和孤岛运行过程中的动态特性,并比较了采用EMAP预测算法前后混合微网的蓄电池容量配置情况。
改革需要调整传统的利益格局。建立完善科学合理的人员分类管理机制,推行法官、检察官的员额制改革,提高法官、检察官的职业尊荣感,让能办案的人投入一线真正办案,极大提高了法官、检察官队伍的正规化、专业化、职业化水平。

图12 PSCAD/EMTDC和Matlab联合仿真系统Fig.12 PSCAD/EMTDC and Matlab joint simulation system
5.1 并网运行
光伏与微型燃气轮机混合微网并网运行时,光伏阵列按最大有功功率输出,指定其无功功率参考值恒为 0;微型燃气轮机补偿光伏阵列输出的有功功率,使注入配电网功率可调度,取注入配电网可调度功率参考值Pgref如图14a所示,功率参考值每隔 2h变化一次,实际运行中可根据电力系统调度部门指令进行取值。图13为光伏和微源输出有功Ppv和 Pmt的波形,图 13a中 Ppv是图 4中某地晴转多云天气下光伏的输出功率,由MPPT控制器调节直流母线电压,以追踪光伏阵列的最大功率运行点;图13b为预测前后微型燃气轮机输出功率,加入预测后,微型燃气轮机能提前调度输出功率来克服其响应慢的缺点。
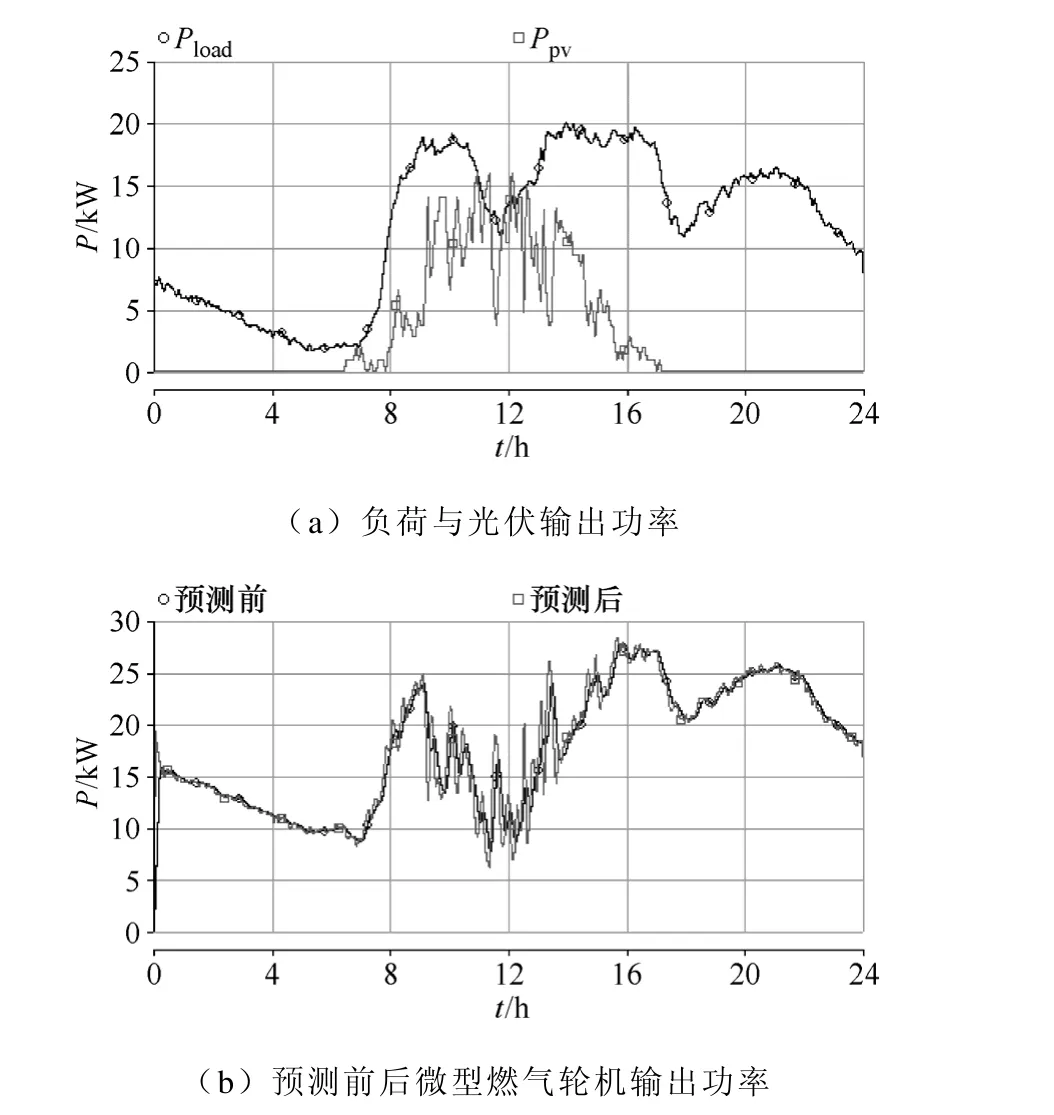
图13 并网运行时负荷和微源输出有功功率Fig.13 Active power of load and microsources in connection mode
图14为并网运行时加入超前预测前后微网与配电网联络线的有功功率。图14b加入超前预测时注入配电网有功功率,在光伏出力波动频繁的白天时间段,其相对于 Pgref的功率偏差主要集中在±2kW左右;图14c为不加入超前预测时注入配电网的有功功率,其功率控制偏差集中在±4kW左右,光伏功率波动越大的时段加入预测前后的差别越明显。可见利用EMAP算法对微型燃气轮机出力进行超前预测调节,能够有效减小微网与配电网联络线功率波动。


图14 并网运行时注入配电网有功功率比较Fig.14 Active power comparison of distribution grid in connection mode
5.2 并网与孤岛模式切换
设t=8h时配电网出现三相短路故障,光伏与微型燃气轮机混合微网PCC处的开关随即动作,使微网由并网转到孤岛模式运行,t=16h时混合微网与配电网重连,负荷功率、光伏光照及温度与 5.1节相同。微网联络线的有功和无功功率如图15a所示,可见并网运行时联络线有功仍按照给定指令变化,并由配电网提供无功支撑。
图15b为微型燃气轮机输出的有功和无功功率,由于功率调节速度缓慢,须采用蓄电池作为主控单元,平滑负荷和光伏发电系统的快速功率波动,维持电压和频率的稳定。图15c为蓄电池输出有功和无功功率,并网运行时大电网提供电压与频率支撑,当切换为孤岛运行时,由蓄电池承担快速变化负荷变化,并维持负荷的电压与频率的稳定。
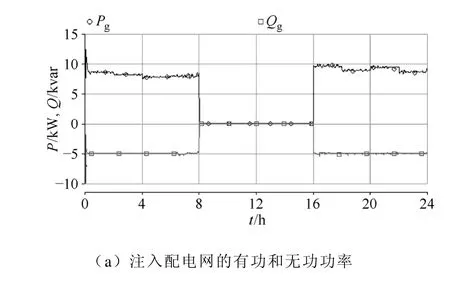

图15 模式切换时微源和注入配电网的有功和无功功率Fig.15 Active and reactive power of microsources and distribution grid during mode switching
蓄电池阵列的开关状态和V/F变流器直流侧电压如图16所示。由图16a可知功率补偿蓄电池阵列的 SOC小于SOCmin=0.1时,备用状态蓄电池则逐个切换到V/F变流器直流侧,通过蓄电池阵列的状态投切以减少蓄电池充放电次数,提高分布式储能蓄电池的使用效率。孤岛运行中蓄电池用于补偿快速小幅的负荷波动,图16c中V/F变流器直流侧电压亦在850~750V间波动变化,在t =12.5h时由于光伏出力下降率高于微型燃气轮机的出力调节速率,导致V/F变流器直流电压短时低于700V。
图17为并网与孤岛模式切换时负荷节点电压Vload和频率 f波形,孤岛时由于蓄电池支撑微网的电压与频率,负荷电压维持在0.985(pu)左右,频率在(50±0.1)Hz范围内,可见本文提出的能量管理策略能够满足微网不同状态切换要求。

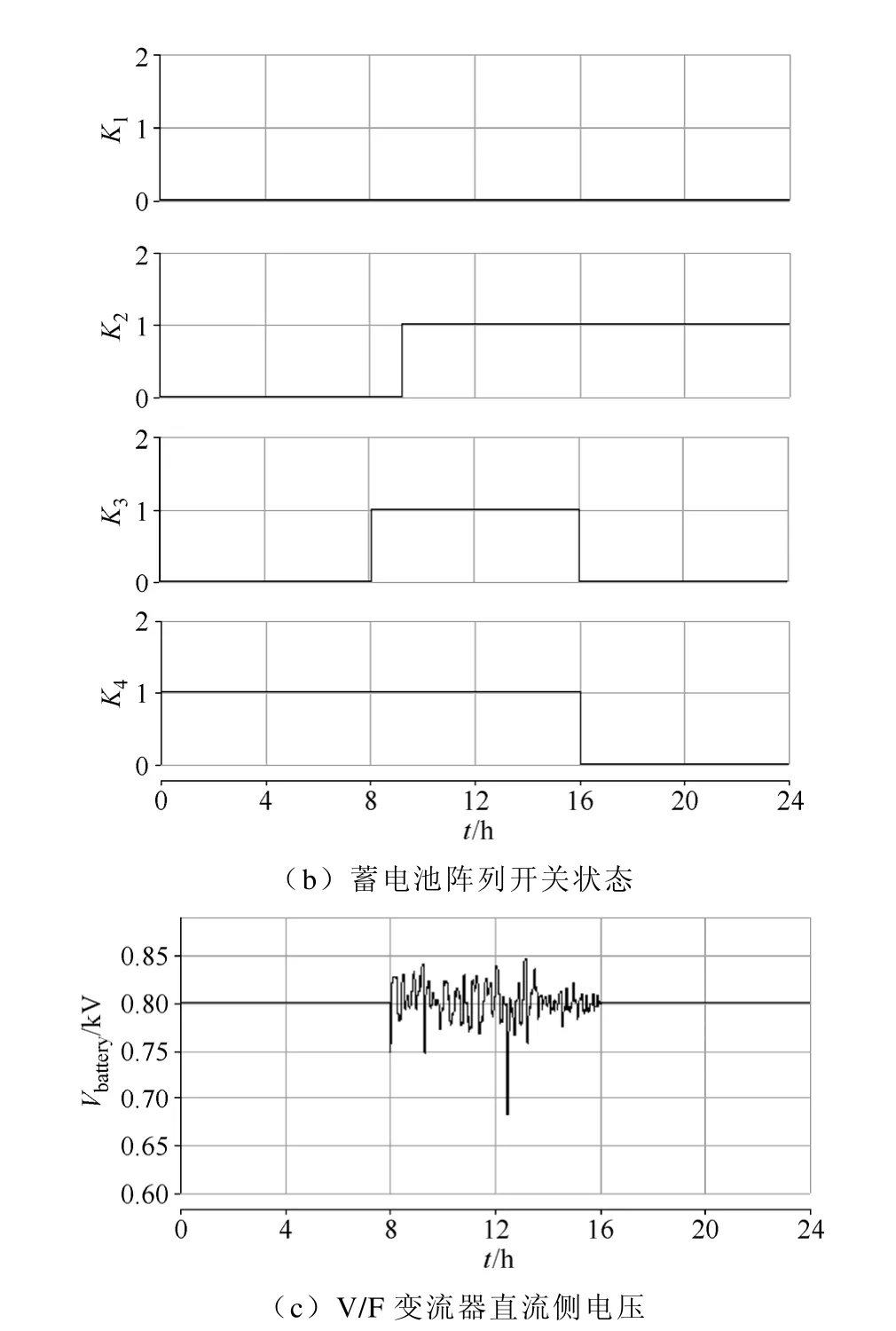
图16 功率补偿蓄电池SOC、蓄电池开关状态和V/F变流器直流侧电压Fig.16 SOC of battery with power compensation, switch state of battery and DC voltage of V/F converter
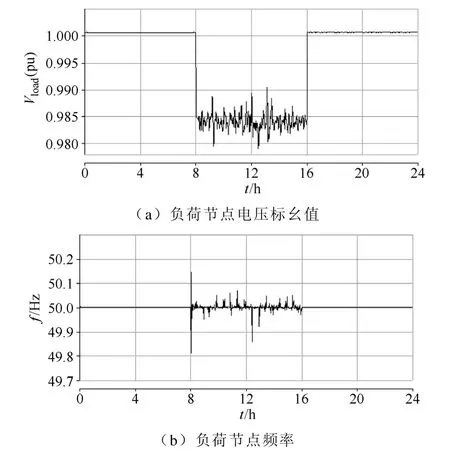
图17 模式切换时负荷节点电压和频率Fig.17 Voltage and frequency of load bus during mode switching
5.3 孤岛运行
图18为混合微网全天24h孤岛运行时微型燃气轮机的输出有功,负荷功率、光伏光照及温度仍与5.1节相同,图中当光伏的出力大于本地负荷时,微型燃气轮机的出力减小为 0,此时蓄电池通过 V/F变流器吸收孤岛微网的多余电能。图19a为孤岛运行加入超前预测时蓄电池输出有功,与图19b不加预测时输出功率相比,蓄电池在加入预测后输出功率波动较小,功率变化率也相对较小。

图18 孤岛运行时微型燃气轮机输出有功功率Fig.18 Active power of micro-turbine during islanding
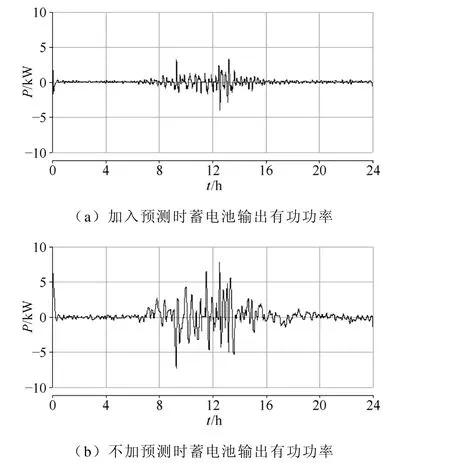
图19 孤岛运行时蓄电池输出有功功率比较Fig.19 Active power comparison of battery during islanding
图20为加入超前预测前后蓄电池容量Eb变化情况,加入预测时须配置的4组蓄电池总容量至少为0.2kW·h,不加预测时须配置蓄电池的总容量至少约为 1.8kW·h。可以看出,利用 EMAP算法预测光伏与负荷功率差额,可克服微型燃气轮机的动态响应延时,减小微网须配置的蓄电池容量。
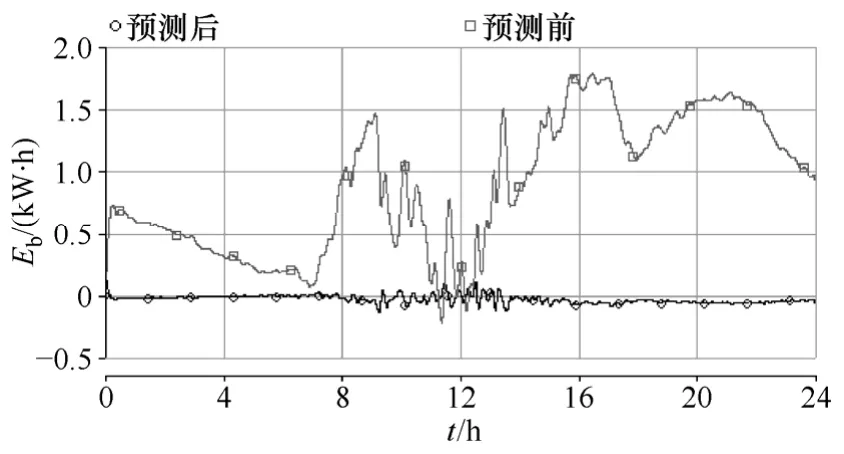
图20 孤岛运行时蓄电池容量大小比较Fig.20 Capacity size comparison of battery during islanding
6 结论
光伏发电和负荷综合功率具有显著的随机波动特性,而微型燃气轮机的动态响应速度较慢,功率调节延时为十秒至几十秒。本文在研究光伏、微型燃气轮机的动态模型基础上,提出了光伏与微型燃气轮机混合微网能量管理策略;根据光伏和负荷功率波动的频率特性,混合微网能量管理中加入了变步长的EMAP实时负荷预测;为了有效减少蓄电池的容量,提高其利用率和工作寿命,提出了一种模块化的蓄电池能量管理模型。通过仿真分析验证了本文提出的方法和能量管理策略的正确性,为光伏和微型燃气轮机混合微网的运行和能量管理提供一种有效的解决方案。
附 录 光伏与微型燃气轮机混合微网模型参数
1.光伏发电系统参数
光电池组件额定功率PN_module=53W;
额定工况(光照 S=1000W/m2,温度 T=298K)时光电池组件开路电压Voc=21.7V;
额定工况时光电池组件峰值电流Isc=3.35A;
光电池组件峰值电压Vmp=17.4V;
光电池组件峰值电流Imp=3.05A;
单个光电池组件含光电池单元个数m=36;组件串联个数NS=25;
组件并联个数NP=15;
光伏阵列额定功率PN_array=25×15×0.053=19.875kW。
2.微型燃气轮机参数
额定功率PN_MT=30kW;
额定转速ωN=60000r/min;
额定电压VN_MT=480V;
转动惯量J=4.64×10-3kg·m2;
排气口参考温度Tref=950℃。
3.蓄电池参数
蓄电池额定电压VN_b=800V;
蓄电池采用Rs-Rp//Cp模型,其中Rs=9Ω、Rp=7.5Ω、Cp=2×10-3F;
V/F和PQ变流器直流侧并联电容均为Cdc=3F。
4.线路参数
所有0.38kV线路单位参数相同ZL=0.642+j0.083Ω/km,L1=1km,L2=0.1km。
5.变压器阻抗参数
RT1=0.04(pu),XT1=0.03(pu),RT2=0.01(pu),XT2=0.05(pu),变压器额定参数见图1。
6.变电站参数
额定电压10.5kV;
短路容量20MVA,X/R=10。
[1]Nikkhajoei H, Lasseter R H.Distributed generation interface to the CERTS microgrid[J]. IEEE Transactions on Power Delivery, 2009, 24(3):1598-1608.
[2]Roman E, Alonso R, Ibanez P, et al.Intelligent PV module for grid-connected PV systems[J].IEEE Transactions on Industrial Electronics, 2006, 53(4):1066-1073.
[3]陶琼, 吴在军, 程军照, 等.含光伏阵列及燃料电池的微网建模与仿真[J].电力系统自动化, 2010,34(1): 89-93.Tao Qiong, Wu Zaijun, Cheng Junzhao, et al.Modeling and simulation of microgrid containing photovoltaic array and fuel cell[J].Automation of Electric Power Systems, 2010, 34(1): 89-93.
[4]徐敏, 阮新波, 刘福鑫, 等.氢光联合供电系统的能量管理[J].电工技术学报, 2010, 25(10): 166-175.Xu Min, Ruan Xinbo, Liu Fuxin, et al.Energy management for hybrid photovoltaic-fuel cell power system[J].Transactions of China Electrotechnical Society, 2010, 25(10): 166-175.
[5]Khanh L N, Seo J J, Kim Y S, et al.Power management strategies for a grid-connected PV-FC hybrid system[J].IEEE Transactions on Power Delivery, 2010, 25(3): 1874-1882.
[6]Datta M, Senjyu T, Yona A, et al.A coordinated control method for leveling PV output power fluctuations of PV-diesel hybrid systems connected to isolated power utility[J].IEEE Transactions on Energy Conversion, 2009, 24(1): 153-162.
[7]赵克, 耿加民, 汪之文, 等.微型燃气轮机发电系统启动过程控制[J].电工技术学报, 2009, 24(2):48-53.Zhao Ke, Geng Jiamin, Wang Zhiwen, et al.Start process control techniques for the microturbine generation system[J]. Transactions of China Electrotechnical Society, 2009, 24(2): 48-53.
[8]Saha A K, Chowdhury S, Chowdhury S P, et al.Modeling and performance analysis of a microturbine as a distributed energy resource[J].IEEE Transactions on Energy Conversion, 2009, 24(2): 529-538.
[9]刘君, 穆世霞, 李岩松, 等.微电网中微型燃气轮机发电系统整体建模与仿真[J].电力系统自动化,2010, 34(7): 85-89.Liu Jun, Mu Shixia, Li Yansong, et al.Overall modeling and simulation of microturbine generation systems in microgrids[J].Automation of Electric Power Systems, 2010, 34(7): 85-89.
[10]Monai T, Takano I, Nishikawa H, et al.A collaborative operation method between new energy-type dispersed power supply and EDLC[J].IEEE Transactions on Energy Conversion, 2004,19(3): 590-598.
[11]Kong Lingzhi, Tang Xisheng, Qi Zhiping.Study on modified EMAP model and its application in collaborative operation of hybrid distributed power generation system[C].Proceedings of the 1st International Conference on Sustainable Power Generation and Supply, Nanjing, China, 2009: 1-7.
[12]陈昌松, 段善旭, 殷进军, 等.基于发电预测的分布式发电能量管理系统[J].电工技术学报, 2010,25(3): 150-156.Chen Changsong, Duan Shanxu, Yin Jinjun, et al.Energy management system of distributed generation based on power forecasting[J].Transactions of China Electrotechnical Society, 2010, 25(3): 150-156.
[13]Wang X Y, Vilathgamuwa D M, Choi S S.Determination of battery storage capacity in energy buffer for wind farm[J].IEEE Transactions on Energy Conversion, 2008, 23(3): 868-878.
[14]Chenni R, Makhlouf M, Kerbache T, et al.A detailed modeling method for photovoltaic cells[J].Energy,2007, 32(9): 1724-1730.
[15]Kim S K, Jeon J H, Cho C H, et al.Modeling and simulation of a grid-connected PV generation system for electromagnetic transient analysis[J].Solar Energy, 2009, 83(5): 664-678.
[16]王成山, 马力, 王守相.基于双 PWM 换流器的微型燃气轮机系统仿真[J].电力系统自动化, 2008,32(1): 56-60.Wang Chengshan, Ma Li, Wang Shouxiang.Simulation of a microturbine system based on double PWM converters[J].Automation of Electric Power Systems, 2008, 32(1): 56-60.
[17]Bae I S, Kim J O.Reliability evaluation of distributed generation based on operation mode[J].IEEE Transactions on Power Systems, 2007, 22(2):785-790.
[18]鲁鸿毅, 何奔腾.超级电容器在微型电网中的应用[J].电力系统自动化, 2009, 33(2): 87-91.Lu Hongyi, He Benteng.Application of the super-capacitor in a microgrid[J].Automation of Electric Power Systems, 2009, 33(2): 87-91.
[19]Wang Caisheng.Modeling and control of hybrid wind/ photovoltaic/ fuel cell distribution systems[D].Montana: Montana State University, 2006.
[20]Ceraolo M.New dynamical models of lead-acid batteries[J].IEEE Transactions on Power Systems,2000, 15(4): 1184-1190.
[21]PSCAD/EMTDC Power System Simulation Software User’s Manual[Z].Canada: Manitoba HVDC Research Center, 2005.