基于加速度计的手指运动姿态检测*
2012-07-25侯文生吴小鹰廖彦剑郑小林杨丹丹
侯文生,蔡 全,吴小鹰,廖彦剑,郑小林,杨丹丹
(重庆大学生物工程学院,重庆 400044)
0 引言
手指运动姿态反映了手指的运动信息,手指运动功能的分析是评测手指的运动能力,为医疗、体育、仿生学等研究提供参考数据的重要手段,在假肢控制、手势识别与跟踪[1]、远程操作[2]、手指康复训练[3]等方面有重要应用价值。手指可以看成是由许多连杆连接组成的关节系统,手指运动姿态表现为各个关节角度的变化[4]。为了无创检测手指运动姿态,人们先后尝试将磁阻传感器、光纤角度传感器、图像传感器等不同类型的传感器用于手指关节角度检测。磁阻传感器[5]利用其电阻值随周围磁场的改变来检测角度的变化,具有体积小、重量轻、灵敏度高的特点,但其易受外界电磁干扰,屏蔽措施占据较多的空间和重量[6];基于图像传感器关节角度检测[7]是利用传感器(如摄像头)记录关节标记点的位置信息,实现手指运动姿态检测,它不妨碍手指运动,但标记点易被遮挡;光纤角度传感器通过感知光通量的变化来测量手指的弯曲度[8],具有抗电磁干扰、测量分辨率高的特点,但其测量动态范围小、存在光纤疲劳效应[9]。微型加速度计是一种以MEMS技术发展起来的、可以检测姿态和角度变化的新型传感器,为手指关节等运动关节测量提供了新的技术手段[10]。
本文设计了一种基于三轴加速度计ADXL330的手指运动姿态检测方法,设计了手指动态角度测量实验,评估了传感器在动态条件下的测量精度,并分析了绝对误差和相对误差的误差分布范围,在此基础上,将传感器用于测量手指关节的运动姿态,设计了手指敲击键盘实验,初步验证了三轴加速度计测量手指关节运动姿态的可行性。
1 姿态测量的原理和方法
1.1 传感器测量运动姿态基本原理
加速度计ADXL330是美国模拟器件公司(ADI)推出的一种基于MEMS技术的三轴加速度计芯片,其既可测量静态加速度,也可测量动态加速度[11]。加速度计ADXL330的传感原理是基于差动电容来感知加速度[11]。当有加速度作用时,引起上下两端电容的变化,这种电容的变化可用来表征加速度,将加速度数据进行信号调理后就能得到正比于加速度的电压信号。传感器摆放位置不同,其敏感轴感受到的重力加速度分量大小也不一样,当加速度计的负向敏感轴与重力方向一致时,此时传感器输出最大值。当所测姿态角改变α时,则加速度计的敏感轴随之转动角度α,通过传感器敏感轴上感应到的重力加速度,经过转换可得到平面倾角大小。
传感器的输出与角度之间存在如下关系[4]

式中α,β分别为传感器敏感轴与水平方向、竖直方向的夹角,xt,yt为传感器当前的输出值,x0,y0为传感器敏感轴在初始位置的输出值,kx,ky为传感器x轴、y轴的灵敏度,ADXL330 的灵敏度测试[4,12]结果为 307 mV/gn。
根据上式得出传感器的敏感轴与水平方向的夹角α,在安装传感器时,传感器的敏感轴应与倾斜体的轴向方向一致,在水平状态下,应与地平面相平。人手指的运动可看成是手指各个关节角度的变化,将传感器置于如图1所示的相应位置,即可实现对手指运动姿态的检测。
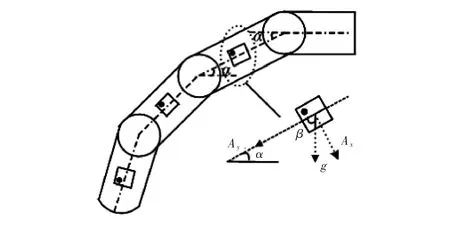
图1 手指测量示意图Fig 1 Schematic diagram of finger measurement
1.2 动态角度测量实验
手指运动姿态测量属于动态角度测量的一种,在将传感器应用于手指姿态检测前,设计一动态角度测量实验,以检验加速度计在动态角度测量中的可靠性与稳定性。
利用步进电机转动角度的可控性,设计了一步进电机(型号57BYG001)控制的、能在竖直平面内旋转的实验装置。将传感器固定在该旋转装置上,固定时使传感器的敏感轴Y轴与水平方向保持一致,通过对比传感器所测角度与电机转动角度来评估传感器在动态条件下的测量精度。利用DSP(TMS320F2812开发板)控制该旋转装置在竖直平面内以半步模式(0.9°/步)在(0°,90°)范围内运动。设置控制脉冲频率为300 Hz,那么,该旋转装置每秒钟转动角度为270°(300×0.9),因此,旋转装置的转动角度满足以下线性规律式中α1为旋转装置所转动的角度,t为转动时间。为了同步记录传感器的输出,采用LabVIEW结合NI公司的NI9205数据采集卡(16 bit分辨率,最高达250 k采样速率)采集加速度计的数据,满足采集时间(1/3 s)后自动停止采集,并将数据自动保存到PC。

在Matlab中进行处理,用二阶butter filter对采集到的传感器数据进行低通滤波处理,截止频率为20 Hz。利用传感器初始输出值和灵敏度ky,由式(1)即可得出运动的角度信息,图2即为一次实验中传感器所测得的动态角度变化图。在相同条件下重复实验8次,每组测得1200个实验数据,对所得数据进行误差统计分析,以旋转平台的转动角度α2作为约定真值,传感器所测角度α1与约定真值之差表示为该实验的绝对误差Δ,绝对误差与约定真值之比表示为该实验的相对误差γ,因此,绝对误差和相对误差可分别用下式表示

绝对误差频数分布直方图如图3(a)所示,相对误差频数分布直方图如图3(b)所示。从图中可以看出:绝对误差主要分布在1°~2.5°之间,相对误差主要分布在3%~6%之间。该实验初步验证了加速度计能用于动态角度检测。

图2 动态角度变化图Fig 2 Curve of dynamic angle variation
2 手指运动姿态检测
2.1 实验方法与过程
1)手指动作实验设计
为了检测手指运动过程中关节运动姿态的变化,本文设计了手指敲击键盘实验。实验前,志愿者食指佩戴好传感器,其余四指向掌面自然弯曲并保持不动。志愿者近期应没有影响运动功能的伤病,测试中要求志愿者保持坐立姿态,掌面水平,掌心向下,手腕保持不动。实验所用键盘为PC机PS/2普通键盘。志愿者在充分理解实验过程并经过几次练习后参加实验。实验开始后,食指在竖直面内敲击键盘,运动速度和平时敲击键盘速度相当。
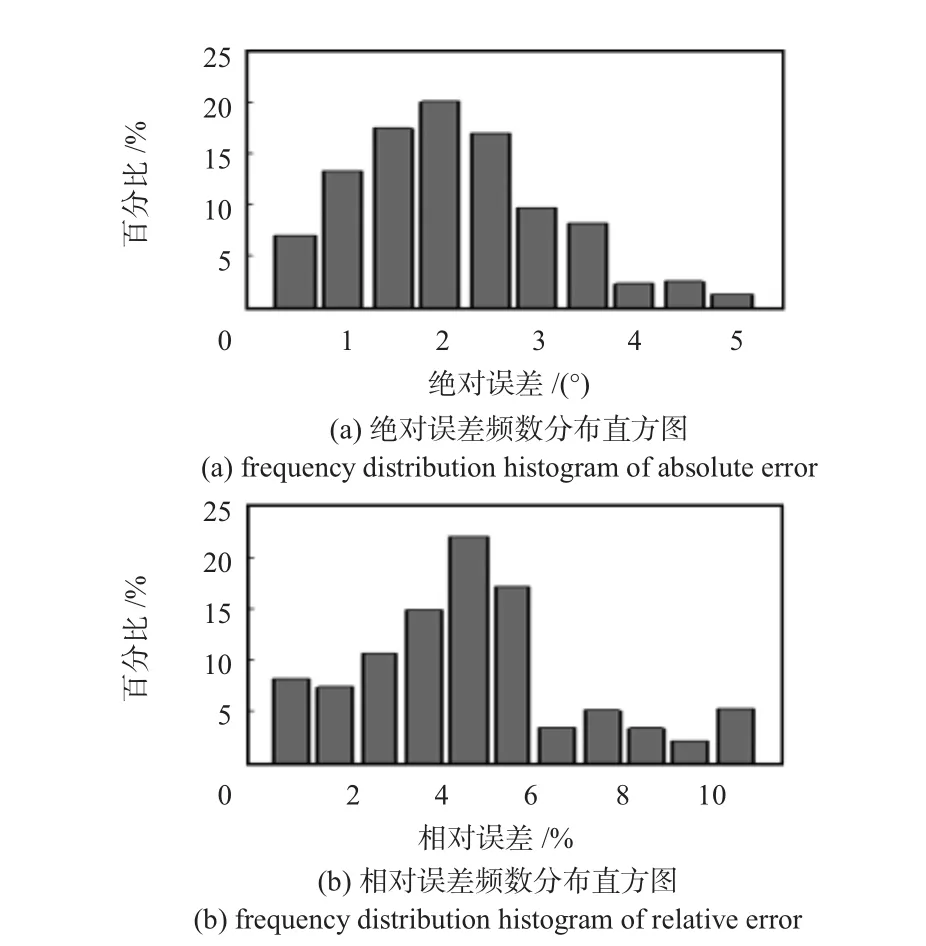
图3 传感器动态角度测量的误差统计Fig 3 Error statistics of the sensor in dynamic angle measurement
2)手指运动姿态检测
将传感器固定在靠近食指3个关节的相应位置处,分别测量食指在敲击键盘过程中掌指关节、近侧指间关节、远侧指间关节的变化,即对应图5中所示的MCP,PIP,DIP。固定传感器时,应尽量使传感器的Y轴与所测指节相平行。在手指运动过程中,采用DSP TMS320F2812开发板同步采集3只传感器的输出信号,利用定时器T1的周期中断触发AD采样,采样模式为顺序采样,采样率设为200 Hz,采样通道数为3,所用软件为CCS(Code Composer Studio)3.1。
2.2 实验结果与分析
将采集的数据在Matlab中进行滤波处理,滤波器选择二阶低通巴特沃斯滤波器,截止频率为20 Hz。利用滤波后的数据,根据式(1)的计算方法即可得到掌指关节、近侧指间关节、远侧指间关节所运动的角度MCP,PIP和DIP,如图4所示。

图4 食指三关节角度随时间的变化Fig 4 Angle variation with time of three joints of index finger
图4中,在0.6~0.9 s时间段,MCP关节逐渐增大,而PIP关节和DIP关节逐渐减小,表明此时手指三关节在做屈指运动;在0.9~1.2 s时间段,MCP关节逐渐减小,而PIP关节和DIP关节逐渐增大,表明此时手指三关节在做伸指运动;1.2 s至整个动作结束,MCP关节增大,而PIP关节和DIP关节呈减小趋势,表明手指在返回阶段完成伸指运动以后,由于惯性手指又发生了一定程度的屈指运动。手指在敲击键盘的整个实验过程中,MCP关节的运动幅度为29°(1°,29°),大于 PIP 关节 14°的运动幅度(136°,149°)和 DIP 关节9°的运动幅度(160°,168°),表明手指敲击键盘动作主要是掌指关节MCP带动近侧指间关节PIP和远侧指间关节DIP的运动过程。上述结果与美国学者Kuo P L等人[13]利用角度计检测到的敲击键盘时食指关节角度变化一致。另外,食指远端指节在接触键盘时会出现短时抖动,这反映在DIP运动角度变化的波动(图4(c))。图4中第一条竖直虚线表示手指接触键盘的起始时刻,该虚线之前的阶段为手指做屈指运动敲击键盘的过程;第二条竖直虚线对应手指接触键盘和抬离键盘的分界线,它与第一条虚线所围区间为手指按压键盘的整个时间段;第三条竖直虚线对应手指抬离键盘的返回阶段,此时手指在做伸指运动。
3 结论
本文基于加速度计ADXL330实现了对手指运动姿态的检测。基于对加速度计工作原理的分析,设计了手指动态角度测量实验,并在此基础上利用加速度计对手指敲击键盘这一手指常用动作进行了运动姿态的检测,得到了食指MCP关节、PIP关节和DIP关节随时间的变化关系。初步的实验结果表明:该检测方法能满足手指关节角度测量要求,具有体积小、成本低、便于携带等优点,可以应用于医疗技术、体育训练以及运动仿生学等领域,具有实际应用价值。
[1]Zhu C,Cheng Q,Sheng W H.Human intention recognition in smart assisted living systems using a hierarchical hidden markov model[C]//4th IEEE Conference on Automation Science and Engineering,2008:253 -258.
[2]Quigley M,Brewer R,Soundararaj S P,et al.Low-cost accelerometers for robotic manipulator perception[C]//The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems,2010:6168-6174.
[3]Hokyoo L,Yoshiyuki T,Tasuku M,et al.Basic experiments of upper limb rehabilitation using haptic device system[C]//IEEE International Conference on Rehabilitation Robotics,2005:444 -447.
[4]侯文生,戴加满,郑小林,等.基于加速度传感器的前臂运动姿态检测[J].传感器与微系统,2009,28(1):106 -108.
[5]高秀玲,黄衍文,丁浩桓,等.运用磁阻感应元件于复健运动之关节角度测量[C]//2008台湾国际医学资讯联合研讨会,JCMT2008,2008:26 -29.
[6]崔建伟.一种微型机器人手指关节角位移测量装置设计[J].测控技术,2004,23(6):8 -10.
[7]刘 蓉.人体运动信息获取及物理活动识别研究[D].武汉:华中科技大学,2009.
[8]Li K,Chen I M,Song H Y.Design and validation of a multi-finger sensing device based on optical linear encoder[C]//2010 IEEE International Conference on Robotics and Automation,2010:3629-3634.
[9]姜志刚.一种新型光纤角度传感器的研究[D].武汉:武汉理工大学,2008.
[10]Shrirao N A,Reddy N P,Kosuri D R.Neural network committees for finger joint angle estimation from surface EMG signals[J].Biomedical Engineering Online,2009,8(2):1 -11.
[11]孟维国.三轴加速度计ADXL330的特点及应用[J].国外电子元器件,2007(2):47-50.
[12]何 青,杜冬梅,张 志,等.三轴加速度计在水下结构振动测试中的应用[J].微电子技术,2007(7/8):159 -161.
[13]Po L K,David L L,Devin L J,et al.Finger joint coordination during tapping[J].Journal of Biomechanics,2006,39:2934 -2942.
