基于光纤陀螺的二位置快速寻北系统设计*
2012-07-25杨功流
贾 明,杨功流
(北京航空航天大学仪器科学与光电工程学院,北京 100191)
0 引言
寻北系统利用惯性器件测量地球自转角速度和重力加速度,经过解算得到载体轴向与北向的夹角,是机动发射的理想定向设备[1,2]。光纤陀螺是全固态的传感器,具有抗振动、启动时间短、寿命长、功耗低等优点,可作为寻北系统的角速率敏感器件[3]。
用捷联式[4]方法寻北,可使结构简单,易于实现小型化。根据惯性器件的布局与转位情况不同,可将寻北系统分为单位置、二位置、多位置和连续转动方案等不同形式,其基本原理都是利用光纤陀螺测量地球自转角速率的水平分量来获得北向信息。由于二位置方案[5,6]能够消除陀螺漂移中的常值误差,得到较高的寻北精度,相对于多位置方案具有较短的寻北时间,因此,适用于快速寻北系统。
本文利用步进电机驱动转位机构,将电机、减速器串联后,布置在转位机构内腔,陀螺与加速度计沿圆周布置在转位机构外侧面,共同利用高度空间。另外,设计导线盘约束转位机构的引线,从而避免使用较大体积的导电滑环。结合惯性器件选择、硬件设计与软件开发,开发基于光纤陀螺的捷联式小型快速寻北系统。
1 二位置寻北原理
选择东北天地理坐标系为导航坐标系OXnYnZn,即确定北向时的基准。载体坐标系OXbYbZb与寻北系统固连,用来描述载体相对于导航坐标系的姿态。导航坐标系经过三次欧拉转动(先绕Zn轴,再绕X1轴,然后绕Y2轴)可得到载体坐标系,如图1所示,α,β为寻北系统安装平面的倾斜角,通过加速度计求出,θ为要求的偏北角。

图1 导航坐标系与载体坐标系的变换Fig 1 Transformation between navigation coordinate and carrier coordinate
由地理纬度φ,可将地球自转角速度ωe在OX1Y1Z1中表示为

寻北系统在载体坐标系中寻北,即陀螺测到的是ωb,由方向余弦矩阵可得载体坐标系到中间坐标系OX1Y1Z1的变换矩阵为,需要作变换得到

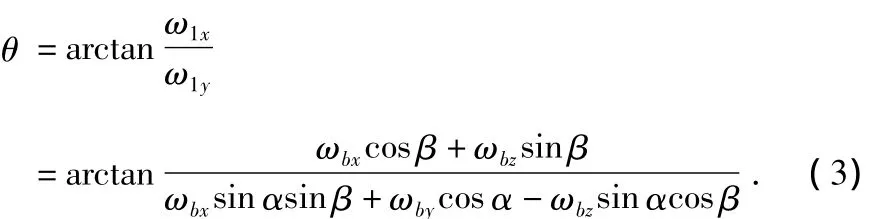
由式(1)、式(2)解出偏北角为
二位置寻北需要敏感轴相互垂直的2只陀螺,平行于陀螺敏感轴的2只加速度计和带动陀螺与加速度计转动的转位机构。系统工作时,先采集第一个位置的数据,然后电机带动转位机构旋转180°,采集第二个位置的数据,最后再旋转回初始位置,进行数据采集,相差180°的数据相减,就能抵消陀螺和加速度计的常值漂移。由导航坐标系到载体坐标系的变换矩阵,将重力加速度g在载体坐标系中表示为

根据加速度计在载体坐标系中采集到的数据及式(4),可求得α,β角,代入式(3),并根据陀螺采集到的数据,即可计算出偏北角。
2 系统总体设计
寻北系统主要由惯性测量单元、转位机构、控制电路、数码显示、二次电源、电源与通信接口等部分组成,总体结构如图2所示。

图2 系统总体结构Fig 2 Overall structure of system
惯性测量单元主要包括2只光纤陀螺与2只加速度计,安装在惯性测量单元支架上,通过轴承与转位机构底座连接,由步进电机驱动产生需要的二位置转角运动。
3 转位机构设计
转位机构由转位机构底座、惯性测量单元支架、步进电机、减速器、精密轴承、定位销等组成,如图3所示。步进电机经减速器后的驱动轴与惯性测量单元支架的旋转轴组成内外嵌套的共轴传动系统,可使结构紧凑、刚度较大,有利于保证转位机构的精密旋转。转位机构整体通过减振器与系统底座相连。
利用引线盘上的八字限位结构控制惯性测量单元的引线,起到拖链的作用,避免使用导电滑环,从而节省空间。当转位机构在位置1时,定位销锁定,保证惯性测量单元敏感轴与载体坐标系的准确角度关系,进行数据采集后定位销松开,电机带动转位机构旋转,到达位置2时,定位销再次锁定并进行数据采集。
4 硬件电路设计
硬件电路主要由数据采集处理单元和转位机构控制单元组成,负责陀螺和加速度计数据采集、通信接口、寻北解算与转位控制等。数据的实时获取和处理与转位控制的快速准确是保证寻北系统精度指标的关键技术,选择DSP作为核心处理器,负责数据采集处理与转位指令发送,FPGA接收转位指令后,对转位机构进行闭环控制,电路原理框图如图4所示。寻北系统通过串口接收上位机的指令或控制按钮启动寻北动作,将解算后的偏北角信息返回上位机,并在数据显示单元上显示。二次电源完成从交流220 V电源到控制电路与电机驱动电路所需电源的转换。

图3 转位机构二位置转换Fig 3 Two postion change of indexing mechanism
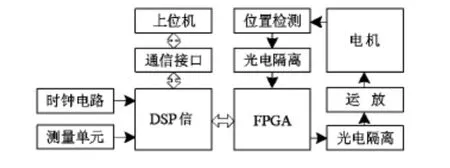
图4 硬件电路原理Fig 4 Principle diagram of hardware circuit
5 软件设计
软件设计与硬件电路对应,主要是实现寻北解算与转位控制,软件的主要工作流程如图5所示。

图5 软件的工作流程Fig 5 Working process of software
6 样机测试
选择2只标度因数接近的零偏稳定性为0.03°/h的光纤陀螺,并对其进行磁屏蔽处理,结合其他器件选择与结构部分设计,构建样机如图6所示。
6.1 转位测试

图6 在转台上测试的样机Fig 6 A prototype being tested on swivel table
对转位机构的快速转动与准确定位进行测试,样机开盖,在转位机构上安装光学棱镜,并用自准直仪进行测试,共进行7次转位精度测试,同时在转动过程中进行光纤陀螺数据的采集工作,用自准直仪记录的角度偏差数据如表1所示。由测试数据可知,多次寻北过程的180°位置重复定位的转位精度为30″,重回0°位置重复定位的转位精度为12″,满足预期设计指标。

表1 转位精度测试Tab 1 Test of rotation precision
转位过程中采集光纤陀螺的地速分量变化,可以发现转位机构转动平稳,转动过程加数据采集过程的整个寻北时间小于3 min。
6.2 单位置重复性测试
将寻北系统固定在转台任一位置,共进行7次单位置重复性精度测试,每次测试间隔5 min,测试数据如表2所示,计算得标准偏差为0.075°。
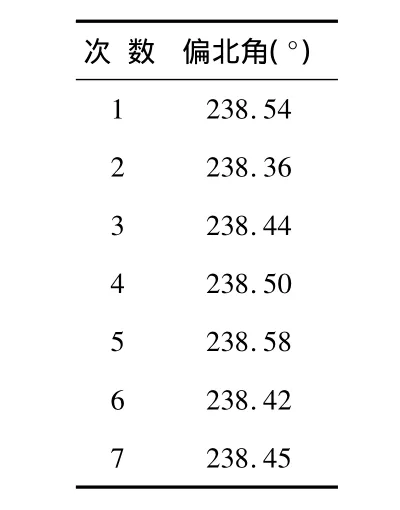
表2 单位置重复性精度测试Tab 2 Precision test of single-station repeatability
6.3 圆周精度测试
转台的0°位置标定为地球的真北方向,寻北系统在转台的0°~360°范围内旋转一周,每隔30°停止一次,并启动寻北过程,进行圆周精度测量,两次测试间隔为5 min,测试数据如表3所示,计算得转台设定的偏北角与实测偏北角差值的标准偏差为0.094°,满足预期的设计指标。
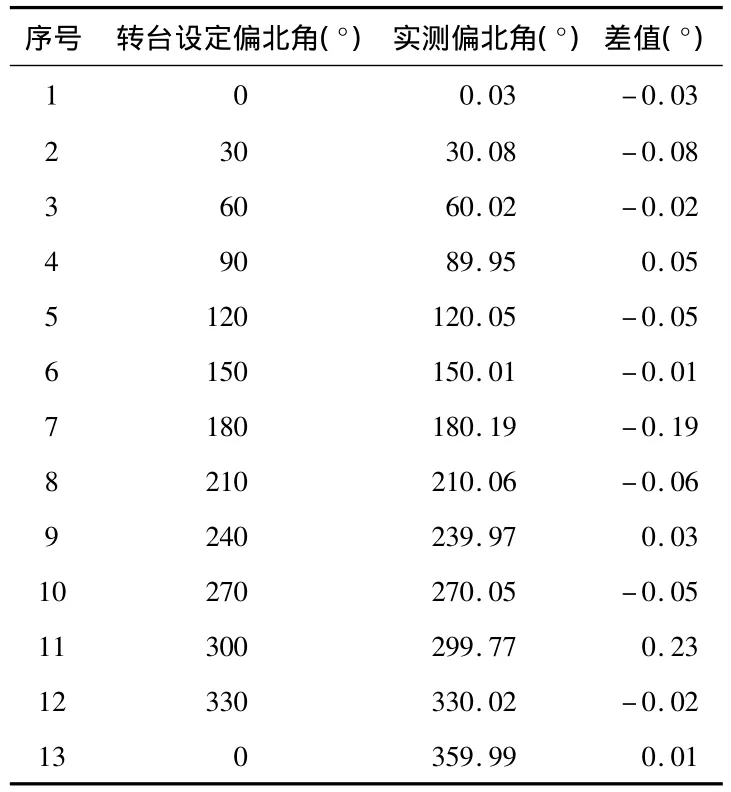
表3 圆周精度测试Tab 3 Test of peripheral precision
7 结束语
基于光纤陀螺的二位置寻北系统采用捷联式寻北,利用步进电机驱动转位机构,具有寻北速度快、精度高、抗振动、可靠性高等优点。通过样机测试,表明基于光纤陀螺的二位置快速寻北系统方案是可行的,单位置重复性与圆周精度小于0.1°,寻北时间小于3 min,满足预期的设计指标。
[1]Paul B R.Progress in development of gyroscope for use in tactical weapon systems[C]//Proceedings of SPIE,Newport Beach,CA,USA,2000,3990:2 -12.
[2]刘东波,刘建业,赖际舟.基于光纤陀螺的单周快速动态寻北算法研究[J].传感器与微系统,2007,26(11):61 -64.
[3]Dyott R B.Method for finding true north using a fibre-optic gyroscope[J].Electronics Letters,1994,30(13):1087 - 1088.
[4]陈 哲.捷联惯导系统原理[M].北京:宇航出版社,1986.
[5]高茂林,赵 忠,张 钧.二位置陀螺仪及转位误差分析[J].计算机测量与控制,2006,14(1):70 -71.
[6]蒋庆仙,马小辉,陈晓壁,等.光纤陀螺寻北仪的二位置寻北方案[J].中国惯性技术学报,2006,14(3):1 -5.