一种多传感器信息融合的可能性关联方法*
2012-07-25周新宇杨风暴吉琳娜李香亭
周新宇,杨风暴,吉琳娜,李香亭
(中北大学信息与通信工程学院,山西太原 030051)
0 引言
多传感器信息融合是对来自多个信息源的不确定信息进行多级别、多方面、多层次的处理,从而产生关于目标更准确、更全面的信息。目标关联建立不同信息源在不同时间、空间所获取目标信息之间的联系,是目标跟踪和态势估计中必不可少的环节。
通常传感器测量过程中存在多种不确定性因素,不确定性通常表现为数据的不完整、不一致及虚假数据。这种不确定性破坏了测量值和目标之间的一一对应关系,导致测量数据与目标对应关系不确定,增加了目标关联的困难。
传统关联方法中,最近邻域法和概率数据关联抗干扰能力差、易产生关联错误;联合概率数据关联(JPDA)及其改进形式,描述的是随机现象,将测量值作为目标的随机事件[1~3]。测量值的不确定性表现为可能性而不是随机性,传统方法不能很好地表达测量值的不确定性,因此,关联错误率较高。
可能性理论是Zadeh A于1978年在模糊集理论的基础上提出来的[4],是处理不确定信息的一种方法,能够充分地表达测量值的不确定性,在处理不确定性时更符合人类的思维方式。此外,较低的信息量和时间计算复杂度,使其成为信息融合研究的热点。因此,引入可能性分布来表述测量值与目标不确定的关系,将测量数据与目标之间的不确定关系量化为经典的决策问题,为不确定关联问题提供了一种简单而有效的解决方法。
1 可能性理论
1.1 可能性理论的基础
模糊集通过隶属度来描述模糊性,模糊性主要表现为可能性,可能性分布与可能性测度是可能性理论的2个重要概念[5,6]。
设是论域U的一个模糊子集,其隶属度函数为μ~A(u),其中,u∈U,由~A产生的关于u模糊限制记为R(u),命题“u是”把变量u同一个等于R(u)的分布联系起来,该分布记为πu,即可能性分布πu=R(u),反映了变量u不同取值对应命题“u是”的可能性的大小。
定义1:设πu:U→[0,1]满足 sup{πu|u∈U}=1,则称πu为论域U上的可能性分布函数。
定义2:给定论域U上关于变量u的可能性分布函数πu,则的可能性测度为

式中 ∏()表示“中存在某个w作为u的值”的可能性程度,而πu(w)为变量u取值为w的可能性[7]。
1.2 测量数据的可能性表达
在传感器测量中,真值是客观不变的,设真值为x0,定义精确集合:A={x0},测量值为xj(j=1,2,…,),经典集合用特征函数刻画测量值xj与集合A之间的关系

即xj要么属于A,要么不属于A。由于测量误差和认识的主观性,真值对测量者来说是主观不确定和模糊的,把一个测量值作为真值和非真值都不现实,因此,可把真值处理成一个关于U的模糊集,并赋予一个可能性分布[8],来描述测量值xj与真值的相容程度π(xj)。
2 可能性分布关联模型的建立
2.1 目标特征的统计距离
通常关联的信息主要为目标状态信息,位置特征是主要的状态信息(经度、纬度)、速度、方向和加速度也是关联的重要特征。
X=(x1,x2,…,xm)表示当前已知的目标集合,Y=(y1,y2,…,yn)为有效测量集合,假设目标和测量值具有s个特征,关联是把当前测量值分配给已知目标,多目标关联可以分解为测量值yj(j=1,2,…,n)与目标xi(i=1,2,…,m)的多目标决策问题。
(k|k-1)表示目标xi在第k时刻位置的预测,Dk(i,j)表示目标xi与测量值yi在k时刻的统计距离

其中,vi(k)=Zi(k)-Zi(k|k-1)表示新息,si(k)为新息协方差。
其他特征的统计距离Dk(i,j)等于k时刻第j个测量值yi同第i个目标xi的预测值关于该特征的分量之差

其中,xit和yjt分别表示目标xi和测量值yj的第t(t=1,2,…,s)个特征分量。
2.2 基于目标特征的可能性分布
测量值yj与目标xi在k时刻关于某特征的统计距离Dk(i,j)表征二者在该特征上的相关性,Dk(i,j)越大,相关程度越小,反之,相关程度越大。通过Dk(i,j)构造测量值yj关于目标集X在特征分量上的可能性分布,由Dk(i,j)与相关程度可知,为偏小型可能性分布[9]。位置特征(经度、纬度)、速度、加速度和方向的可能性是关于Dk(i,j)的减函数,但关于Dk(i,j)的变化不同,它们的可能性分布并不完全相同。
对于位置、速度和方向,当Dk(i,j)≤a时,可能性近似为 1,当a≤Dk(i,j)≤b时,可能性对Dk(i,j)变化敏感度不大,b≤Dk(i,j)≤c时,敏感度增大,上述特征近似服从Z型分布,函数关系如下

a为可能性为1时,Dk(i,j)的最大阈值,通常很小,当然由于特征量纲,不同特征对应的a并不相同;b为可能性过渡点,当Dk(i,j)=b时可能性为0.5,测量值yj与目标xi在对应特征的关联模糊性最大,是可能性变化的拐点;c为可能性为0时,Dk(i,j)的最小阈值,c值通常较大。
加速度表征目标的机动性,在相邻的采样周期内,通常变化不大,运动中不同于其他特征,可能性分布近似服从k次抛物线分布,函数关系如下
当Dk(i,j)>a时,可能性对Dk(i,j)变化很敏感,其减小速度较快,而后随着D(i,j)增大,可能性变化率减小,减小速度放缓。
2.3 变权可能性算子
测量值yj关于目标xi在特征分量t(t=1,2,…,s)上的可能性为(t),且满足0≤(t)≤1(t)表示测量值yj与目标xi在特征t上的关联支持度,求得测量值yj与X中目标在特征t上的可能性,得到特征t的可能性分布。
综合s个特征,测量值yj与目标xi的综合可能性

其中,f=0.5,p为奇整数,决定各特征在关联决策中的权值,p较小时,模糊度较高的特征对关联结果影响较大,反之,模糊度较高的特征对关联的影响较小,因此,p的选取较为重要。p=1时为算术平均值;p≥3时,高模糊度的特征对关联的综合评价有很小的影响;当p→∞时,特征分量中的最大可能性的作为最终的关联可能性。
2.4 关联判断
可能性关联模型建立分以下几个步骤:
1)各特征分量的统计距离确定:应该根据式(3)或者式(4)计算测量值yj与目标xi在各特征分量上的统计距离;
2)特征差异模糊化:利用可能性分布函数式(5)或式(6),计算测量值yj与目标xi在各特征分量上关联可能性(t)大小;
3)关联综合评价:通过变权可能性算子式(7)计算测量值yj与目标xi的综合关联可能性。4)关联决策:由(i=1,2,…,m),选取可能性最大的目标xt,即

当<0.5(选取p=3)时,支持关联成功的可能性小于关联失败的可能性,xt不能作为关联目标;=0.5 时,关联的模糊性最大,也不能判断yj与xt关联与否,将测量值yj当作新目标;当>0.5时,确定xt为yj的关联目标。
3 仿真分析
假设3个目标交叉运动的仿真场景,随机分布的杂波密度为0.3/km2,传感器采样周期T=4 s,采用拓展卡尔曼滤波器(EKF)对目标状态进行估计和预测,只考虑目标在二维平面(X—Y)的运动,用传统的JPDA和可能性方法进行比较,蒙特—卡洛仿真次数为100次,仿真结果如图1~图5所示。图1为3个目标在空中的运动情况,符号o表示随机分布的杂波。图2表示传统JPDA的关联情况,当目标1与目标3运动到同一区域时,即目标交叉或接近时,JPDA不能正确进行关联和跟踪;图3为可能性方法的关联运动过程,3个目标均能进行准确的关联和跟踪,因此,可能性关联方法正确率明显高于JPDA。
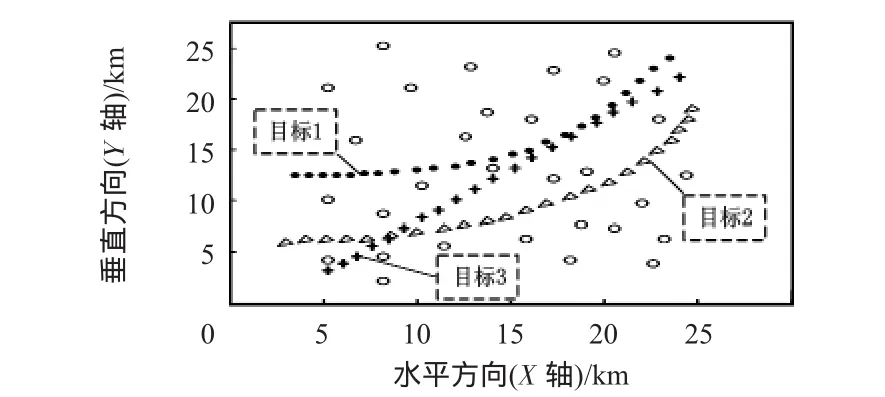
图1 目标的运动过程Fig 1 Moving process of targets
图4、图5分别采用JPDA(用符号o表示)和可能性方法(用符号+表示)时,目标2在X方向和Y方向上的均方误差(RMSE),可能性方法关联精度明显高于传统的JPDA。
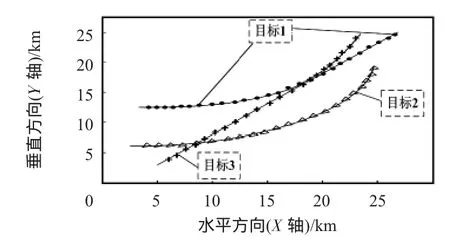
图2 JPDA目标关联运动过程Fig 2 Target association moving process of JPDA
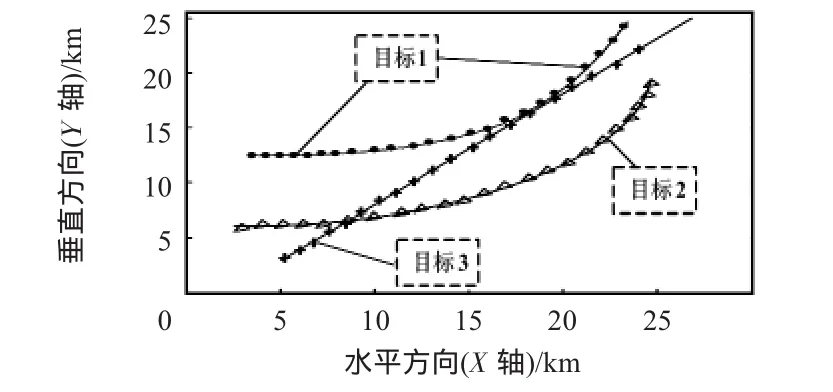
图3 可能性方法目标关联运动过程Fig 3 Target association moving process of possibility method
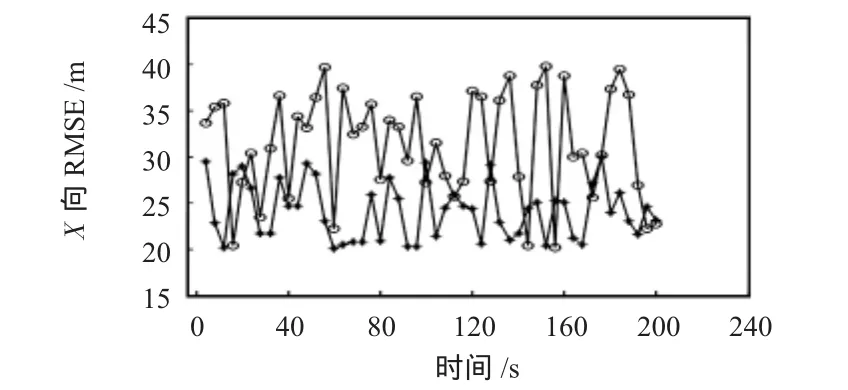
图4 目标2的X方向均方误差Fig 4 RMSE of X direction of target 2
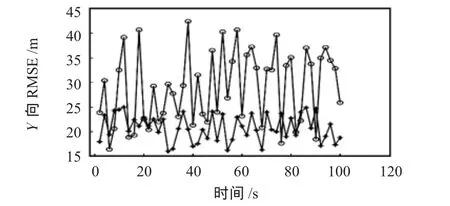
图5 目标2的Y方向均方误差Fig 5 RMSE of Y direction of target 2
4 结束语
传感器的测量值天然地具有多种不确定性,传统方法不能很好地表达这种不确定性,而可能性理论能充分地描述测量值的不完备状态。引入可能性理论建立了一种可能性关联模型,将测量值与目标在特征分量上的统计距离进行模糊化,构造了测量值关于目标的可能性分布,很好地反映测量值与目标真值的相容程度,并通过可能性分布量化这种模糊关系,并得到客观的关联结果。
[1]何 友,王国宏,关 欣,等.信息融合理论及应用[M].北京:电子工业出版社,2010,194 -202.
[2]周新宇,杨风暴,吉琳娜.一种新的地面目标多特征关联方法[J].通信技术,2011,44(9):132 -134.
[3]万树平.运用Vague集进行多传感器目标识别[J].传感器与微系统,2011,30(1):58 -78.
[4]Zadeh L A.Fuzzy sets as a basis for a theory of possibility[J].Fuzzy Sets and Systems,1978,1(1):3 -28.
[5]Silva R C,Yamakami A.The use of possible theory in the definition of fuzzy pareto-optimality[J].Fuzzy Optim Decis Making,2011,3(10):11 -30.
[6]Peng Yi,Kou Gang,Wang Guoxun,et al.FAMCDM:A fusion approach of MCDM methods to rank multiclass classification algorithms[J].Omega,2010,10(10):1016 -1028.
[7]Lohweg V,Voth K,Glock S.A possibilistic framework for sensor fusion with monitoring of sensor reliability[J].Sensor Fusion-Foundation and Applications,2011,32(4):191 -226.
[8]肖明珠.基于可能性理论的测量数据处理[J].信息与电子工程,2006,4(2):98 -102.
[9]胡宝清.模糊理论基础[M].武汉:武汉大学出版社,2010:473-517.
