自动驾驶仪计算机测试设备设计
2012-07-25张大高王新民
张大高,李 俨,王新民
(西北工业大学,西安710129)
1 引言
随着电子技术和计算机技术的迅猛发展,以计算机和信息处理为中心的自动测试系统在科学研究和实际工程领域都得到了广泛应用。尤其是在军事应用领域,电子测试技术和测试系统的要求变得越来越高,测试项目和测试范围要求不断扩展,测试速度和精确度要求也与日俱增。因此,自动测试系统在军事装备测试领域中占有非常重要的地位。
2 测试设备工作机制
自动驾驶仪计算机测试设备用于在实验室环境下,对自驾仪计算机进行开环测试和闭环测试。该系统主要由三部分组成:①自动驾驶仪计算机测试设备硬件部分;②自动驾驶仪计算机测试设备上位机主控软件;③自动驾驶仪计算机测试设备下位机驻留软件。这三部分有机组合在一起构成整套测试设备。整个系统的工作机制框图如图1所示。

图1 自动驾驶仪计算机测试设备工作机制图
该系统中测试设备硬件部分与被测件(自动驾驶仪计算机)之间用标准连接器连接,测试设备硬件部分与被测件(自动驾驶仪计算机)内都存在各自的操作系统,上位机主控软件运行在测试设备中,下位机驻留软件运行在被测件中,上位机主控软件通过以太网络给下位机驻留软件发送网络命令,间接操作被测件内板卡资源的输出,同时又直接操作测试设备内部板卡资源进行数据采集,达到信号测试的目的。
2.1 测试设备硬件
该系统中测试设备硬件部分是整个设备正常工作的基础,它主要由工控机、信号处理板卡和信号适配器三大核心部件组成。其中工控机为上位机主控软件提供运行平台、为信号处理板卡提供PCI插槽。信号处理板卡主要由CP-118U(232)、CP-118U(422)、CP-118U(485)3块串口板卡,PCI7260数字量板卡,PCI9111 AD采集板卡,PCI6208V模拟电压输出板卡、PCI6208A电流输出板卡组成,它们为测试过程提供激励源以及采集被测件的信号,信号适配器主要由一些逻辑电路组成,完成对工控机内各种信号处理板卡信号资源进行适配调整,使工控机内板卡资源与被测件内的被测信号资源建立映射关系。
2.2 上位机主控软件
上位机主控软件运行在测试设备工控机内,上位机主控软件的开发以C++语言为主,配合Microsoft SQL Server实现测量过程管理,在Windows XP系统下开发一套基于模块化的测试系统主控软件,上位机主控软件的结构图如图2所示。软件主要包含:硬件自检、校准、测试参数阈值设置、控制测试流程、信号采集、信号输出、数据分析、数据同步存储、数据传输、故障诊断等一系列功能,可实现对串口通信、电压、电流等信号的采集、处理与诊断,为相关人员提供测试结论和测试建议。
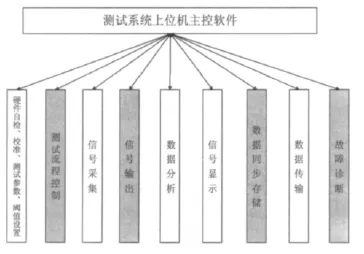
图2 测试系统主控软件结构图
2.3 下位机驻留软件
下位机驻留软件运行在被测件(自动驾驶仪计算机)内,它的开发以C++语言为主,是在QNX系统(一款实时分布式操作系统)下开发的一套基于模块化的驻留软件,下位机驻留软件的结构图如图3所示,软件主要包含被测件CPU、电子盘测试模块,接收网络命令模块、执行网络命令模块、信号输出模块、信号采集模块、数据处理模块、返回操作结果模块。可实现对被测件内部资源的控制与采集并将处理结果反馈到主控软件中。
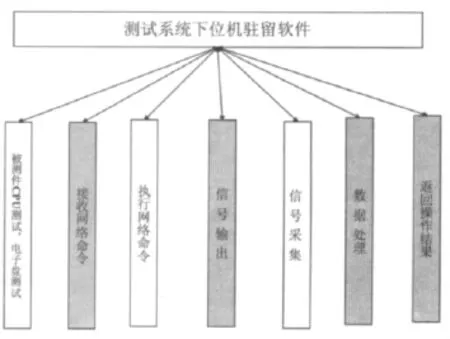
图3 测试系统下位机驻留软件结构图
3 测试设备关键技术设计
3.1 网络通信设计
网络通信设计的难点是需要通信的软件分别在两个不同的开发环境下(Windows XP和QNX)开发。上位机软件和下位机软件之间使用基本的TCP进行通信。程序使用最基本的socket嵌套字的形式实现。下位机软件上创建TCP server程序,而在上位机软件中创建TCP client程序。当服务器端TCP server和客户端TCP client连接完毕后就可进行数据通信了。
根据被测信号的种类,结合上位机软件的处理方式,同时考虑测试具体功能,将通信数据段定义为10种模式。数据包分为命令包和跟随/返回包。命令包的基本格式如下:

命令包一共有8个字节,其中前三个字节作为命令包的同步识别码,用于作为合法命令包的标识。第四个字节是命令码,用于判断此命令包的模式。后四个字节作为参数。跟随/返回包基本格式如下:

跟随/返回包的长度不定,前三个字节作为跟随/返回包的同步标识码,用于作为合法跟随/返回包的标识。第四个字节是响应码,表示此跟随/返回包的模式,后两个字节为参数,紧接着是Data内容。
3.2 自检设计
自检设计的难点是自检的完整性,工作量很大。自动驾驶仪计算机测试设备本身的正确性是整个测试过程顺利完成的前提,测试设备在硬件设计的时候加入了内回绕回路的设计思想,自检回路开关由内回路继电器控制,自检程序首先打开自检回路开关,组成畅通的自检回路,此时测试设备内部的板卡资源就互相连接在一起,其中DA通道对应连接到AD通道上,DO对应连接到DI上,同类相邻串口间读写对接,自检控制程序会控制DA板卡通道输出一定的电压激励然后控制AD板卡采集相应的电压值,判断AD和DA板卡的正确性。利用DO输出,对应的用DI采集,同类相邻串口间一串口写数据,另一串口读数据,以此判断测试设备内部板卡资源是否正确。为了进一步验证设备的正确性,我们在设计时又加入外回路校验,我们设计了一个外回路自检插头,将其接到每个连接器上,组成自检外回路,进而加强自检的准确性。
除此之外,测试设备考虑对设备内部各种供电电源进行检测,利用检验过的AD板卡多路AD通道采集相应供电电源电压值,以此判段各类电源的正确性。
3.3 自动测试设计
自动测试的设计难点在于如何对信号的测试流程进行控制。为更好的对自动测试流程进行控制与实现,首先对所有被测信号进行分析,然后对它们进行统一的32位编码,由于被测信号与连接器的管脚有一定的对应关系,对连接器的每个管脚信息用一个32位无符号整形数表示,每个无符号整形数,包含被测信号的类型、处理方式、所在的连接器位置与管脚位置。所有信号一共分为10种处理机制。而每种处理机制可简化为2-3个变动参数,因此一个32位无符号整形数可以完整的标识测试信息。下面介绍一下32位无符号整形数的字节功能。

其中32位无符号整形数的最高8位即Bit31-Bit24用于表示信号的处理方式,范围(0-0xFF),第Bit23-Bit16位代表某种处理方式下的参数1,第Bit15-Bit8位代表某种处理方式下的参数2,第Bit7-Bit0位代表某种处理方式下的扩展参数。
3.4 数字量监控设计
实时数字监控的设计难点在于如何保证实时数字监控不影响到软件其他功能的实现,特别是对软件间通信造成的影响,需要把握监控的强度。经过反复测试,监测时间间隔在200ms/次最为合适。
对数字量的监控主要完成对被测件内所有PO/PIN进行监测,其中对PIN监测采用网络通信查询的方式,即在定时函数中,PC机发送查询所有PIN口的命令,然后接收数据返回包,根据返回包内容显示PIN的状态。对PO的检测采用实时记录的方式,即在程序运行时对所有PO口进行初始化,然后对PO的所有操作都记录到内存中,然后从内存中定时读取数据显示到界面上。
4 结束语
该系统设计体现了如下创新点:
·测试设备具有可扩展性,板卡、航空插头留有足够的余量,当被测试的自动驾驶仪型号改变时,即检测的信号数量发生变化时,只要对测试设备的软件做些修改,再重配一个信号转接盒便可;
·信号测量单元所采用的板卡均为自带微处理器的智能型板卡,板卡具有BIT功能、自校准功能和工作状态灵活设定并自动存储等功能;
·每个板卡在面板上均设计有电源指示灯和工作状态指示灯,故障指示简单明了;
·测试设备与被测件间使用自定义的通信协议,比使用通用通信协议更简洁明了,通信数据量大幅降低;
·设备的自检更加准确。测试设备硬件在设计时强化自检的重要性,同时设计了内回绕和外回绕的设计思想;
·测试效率更高。为方便用户批量测试,测试设备提供自动测试功能,用户可以在2分钟内实现对上百个测试信号的测试;
·测试过程更加透明。为用户提供测试监控功能,用户可随时观测测试过程中被测件的信号变化。
该设备已成功应用于某型自动驾驶仪的测试中,得到用户的好评,收到了良好的经济效益和社会效益。
[1] 李行善,左毅,孙杰.自动测试系统集成技术[M].北京:电子工业出版社,2004.
[2] 张朝晖.检测技术及应用[M].北京:中国计量出版社,2005.
[3] 柳爱利,周绍磊.自动测试技术[M].北京:电子工业出版社,2007.
[4] 崔俊芝.软件设计基础[M].北京:高等教育出版社,2000.
