花瓣式可展天线的结构分析
2012-07-25罗阿妮刘贺平张桐鸣
罗阿妮 刘贺平 李 杨 张桐鸣
哈尔滨工程大学,哈尔滨,150001
0 引言
由于发射航天器的火箭荷载舱的容量有限,因而传统的固面天线制约了大口径空间天线的发展。可折叠展开结构的出现拓宽了大口径空间天线的应用领域,使空间天线得到了前所未有的发展[1-3]。在空间可展结构这一领域,我国与国外还有较大差距,研究大口径空间可展结构的相关理论和技术,提高卫星的通讯能力和对地观测能力,已成了当前航天技术研究的一项重要任务[4-5]。本文针对一种仿造花朵形态的空间可展天线,通过分析确定了其结构参数。
1 结构简述
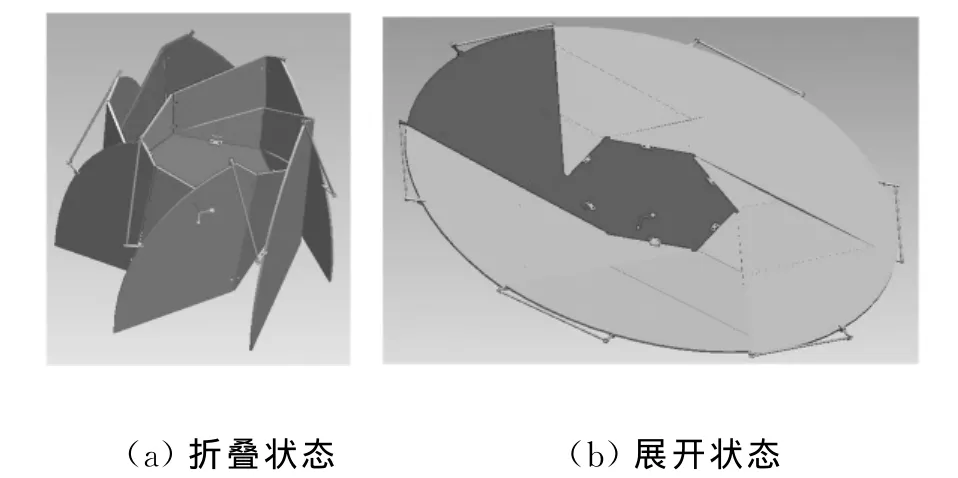
图1 花瓣式可展天线
图1所示为花瓣式可展天线的折叠和展开状态。此可展结构是由1个中心正s边形和s个花瓣组成。每个花瓣由p块刚板组成。每个花瓣的根部刚板是1个直角三角形,这样可以保证花瓣整体能够翻转到与中心正多边形垂直的平面上。每个花瓣的中间p-2块刚板都为梯形,以便花瓣能够盘绕到中心正多边形周围。花瓣最顶端是一块不规则形状的刚板,刚板的一条边为花瓣式可展天线完全展开后形成的圆的一部分。刚板之间由铰链连接,为了使各花瓣间协调运动和减少驱动构件数,各花瓣由杆构件和运动副连接。
2 连接形式的确定
空间机构的自由度计算公式为

式中,n为机构的构件数;j为移动副的个数;ui为关节i的约束数量[6]。
本文研究的花瓣式可展天线是一个多刚体空间机构,运动复杂。为了减小驱动能量和驱动装置质量,降低控制难度,必须限制天线的自由度。闭环机构的自由度较开环的少,因此这里采用杆构件把各相邻花瓣连接形成闭环机构。为了降低运动的复杂性,这里只考虑连接相邻花瓣的杆构件数为1和2的情况。杆构件之间,以及杆构件与花瓣相连,可以采用转动副和球副来完成。这里选择机构自由度为s,根据式(1)计算不同情况下此机构的自由度,结果如表1所示。
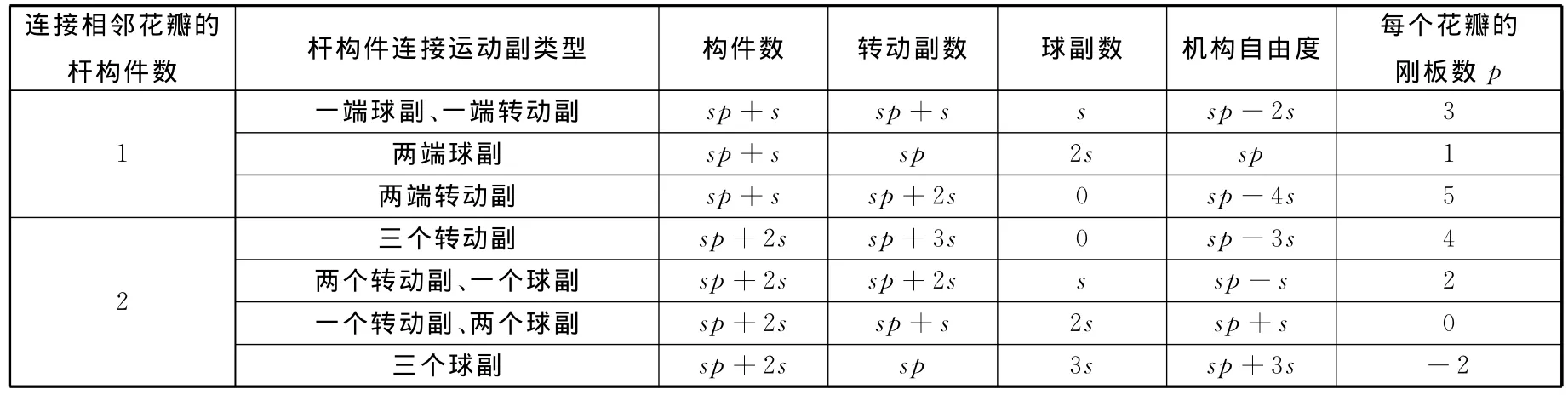
表1 花瓣刚板数的确定
由表1可知:当杆件为单杆,一端球副连接,一端转动副连接时,刚板数为3;当杆件为单杆,并且两端转动副连接时,刚板数为5;当杆件为双杆,由三个转动副进行连接时,帆板的刚板数为4。其余类型的连接方式不符合要求。为了保证机构构件数最少,这里选择每个花瓣的刚板数为3,花瓣间通过一个杆构件、一个转动副和一个球副连接的结构形式。
3 刚板宽度的确定
花瓣式可展天线的折叠方式为花瓣绕着中心正多边形旋转折叠,如图2所示。由于花瓣式可展天线径向尺寸比刚板厚度大3个数量级,因此在计算分析时可忽略刚板厚度。如图3所示,当天线的厚度忽略后,各刚板的宽度L1、L2应等于中间多边形的边长(顶部刚板L3除外),这样此天线才能折叠成如图2所示的状态。分析各部分的结构尺寸关系可得,图2所示折叠状态的结构参数所需满足的条件为

式中,H为中间多边形的边长;R为花瓣式卫星天线的半径。
如图3所示,L1、L2都应该等于中心正多边形的边长,而L3的值是可以变化的。根据几何关系分析,可得
图2 天线折叠状态
图3 花瓣数为6、各花瓣的刚板数为3的花瓣式可展天线

将式(3)代入式(2),整理得

当L3≤L2时,f>1,不满足式(2)的要求,只有L3>L2时,f≤1,才符合设计要求。
4 花瓣数的确定
图4 折叠状态下天线的简化图
当天线完全收缩后,图3所示的AF长度为天线轴向最大高度。通过相应的几何关系推导,可得

根据上面的分析,对式(2)进行变换,得
这样可以获得中间正多边形的边长最大值。花瓣式卫星天线折叠后的形状可近似为圆柱形,底面半径为图4所示的AO的长度,高为图3所示的AF的长度,因此天线折叠后的体积可近似地表示为
通过式(8)可以看出,天线中间多边形的边长和中间多边形的边数对天线收缩后体积是有影响的。
设天线的半径R=1m,当每个花瓣刚板数为3时,根据式(7),可以得出天线边长的最大值,如表2所示。

表2 中间多边形边长最大值
当天线花瓣的刚板数一定时,天线收缩后的体积与天线中间多边形的边长成反比,即当天线中间多边形的边长为最大值时,天线收缩后的体积达到最小。获得的天线折叠后最小体积的具体数值在表3中列出。

表3 天线收缩后最小体积Vmin
从以上的分析计算结果可知,当刚板数为3,中间多边形的边数为5时,天线收缩后体积最小。当连接两花瓣的杆构件的一端是球副连接,中间多边形的边数为5,也就是花瓣数为5时,花瓣与花瓣间的相对转角过大,球副连接并不能完成过大角度的转动,因此,根据表3,中间多边形的边数,也就是花瓣数,确定为6。
5 结语
花瓣式可展天线是一种多刚体空间机构,构件数目多,运动复杂,因此结构设计具有一定的难度。本文通过对此机构各种情况的自由度分析,确定了各花瓣间的连接方式。利用天线折叠形状要求,得到了各刚板宽度的关系式,又进一步推出了各板宽间的大小关系。利用天线展开和折叠状态下各部分结构尺寸的几何关系,确定了天线折叠状态的底面半径和高度,从而获得了天线折叠后体积表达式。通过对天线折叠后体积表达式的分析,最终确定了天线的花瓣数。这样的分析使得花瓣式可展天线的设计更加合理。
[1]赵孟良.空间可展结构展开过程动力学理论分析、仿真及实验[D].杭州:浙江大学,2007.
[2]张逸群,杨东武,杜敬利.周边桁架可展开天线小冲击展开过程设计[J].宇航学报,2011,32(5):1205-1210.
[3]侯管仲,肖勇.金属网反射器索网预应力对模态的影响[J].空间电子技术,2010(4):54-56.
[4]罗阿妮,邓宗全,刘荣强,等.伸展臂根部锁定机构的设计与运动分析[J].机械设计,2011,28(1):56-59.
[5]邓强.锥形可展桁架的设计与分析[D].哈尔滨:哈尔滨工业大学,2010.
[6]杨廷力.机器人机构拓扑结构学[M].北京:机械工业出版社,2004.