多基ISAR舰船侧视及俯视高分辨率成像方法
2012-07-24李宁汪玲*张弓
李 宁 汪 玲* 张 弓
多基ISAR舰船侧视及俯视高分辨率成像方法
李 宁 汪 玲张 弓
(南京航空航天大学电子信息工程学院 南京 210016)
由于舰船运动的复杂性,获得舰船高分辨率图像一直是雷达成像领域的热点,同时多平台联合监视和作战模式近年来发展迅速。基于上述情况,该文提出了一种多基ISAR舰船成像方法。该方法通过合理布置各平台的高度和方位,综合各平台接收的回波数据后,相比单基雷达可增加平稳成像积累时间,结合最优成像时间段选择,可获得更高分辨的舰船侧视及俯视图像。仿真实验结果验证了该成像方法的有效性。
逆合成孔径雷达(ISAR);舰船;多基;侧视;俯视
1 引言
ISAR能够对非合作目标成像,得到目标的2维高分辨率图像,是一种有效的雷达目标识别途径。与其它运动目标(如空中的飞机和地面上的车辆)的成像相比,舰船成像的特点是海浪起伏引起的舰船偏航、纵摇和横摇可以作为成像的主要来源。同时,由于舰船的3维摇摆运动,导致目标有效转动矢量的大小和方向具有时变特性,获得高质量的舰船图像具有较高难度。
针对舰船目标的成像问题,国内外学者已经提出了一些成像处理方法,如时频分析法、最优成像时间选择法。时频分析法不受多普勒频率时变的影响,可以得到一系列的反映舰船姿态变化的瞬时图像,但是计算量偏大,存储量也较大,对于后期的目标识别,存在较大的信息冗余。最优成像时间选择法通过从回波数据中提取舰船的运动信息,并根据该信息确定最有利于成像的时间段进行成像。该方法运算量小,并且可以有针对性地得到舰船的侧视图和俯视图,非常有利于舰船目标的识别,但是这种方法基于观测期间转动矢量近似不变的假设,虽然可以依靠时变运动补偿适当增加积累时间,但成像积累时间仍然受限。
近年来,在多平台联合监视和作战模式实际需求的推动下,多基ISAR成像方法获得关注。利用分置于不同载机平台的雷达形成多发多收的ISAR系统,通过综合各平台的回波数据,可增加成像积累时间,有效提高目标的方位向分辨率。文献[9]和文献[10]以舰船目标为例,分别探讨了如何利用多基ISAR提高目标俯视图和侧视图的方位向分辨率,但是均假设载机静止,而且目标相对雷达仅含有垂直转动矢量或水平转动矢量。但是在实际中,不但载机运动,而且舰船在正常航行的同时还受到海浪的作用做3维非平稳摇摆运动,垂直和水平转动矢量同时存在。此时,文献[9]和文献[10]中方法的应用将受到限制。本文在对文献[9]和文献[10]进行深入研究的基础上,提出了一种新的多基ISAR舰船成像方法,该方法通过合理布置各平台的高度和方位,综合各平台接收的回波数据后,结合最优成像时间段选择,可同时获得高分辨的舰船侧视及俯视图像。与文献[9]和文献[10]中方法相比,该方法针对实际情况,更全面考虑了载机运动和舰船的3维摇摆运动,通过联合多平台雷达数据,可同时提高舰船目标侧视和俯视的方位向分辨率。本文通过仿真数据的处理,验证了该方法的有效性。
本文内容安排如下,第2节给出多基ISAR对舰船成像原理,第3节给出多基ISAR舰船侧视和俯视成像算法以及处理流程,第4节对本文的多基ISAR舰船成像方法进行仿真实验验证,第5节是结论。
2 多基ISAR舰船成像原理
本节以双基雷达为例描述成像原理。成像几何关系如图1所示。观察起始时刻,即时,舰船中心位于固定参考坐标系的原点,固定于舰船的坐标系与重合,为目标上某散射点。舰船以速度沿轴正方向航行,同时舰船受到海浪的作用做3维非平稳的摇摆运动,,,分别表示其偏航、纵摇、横摇的角速度。载机和以相同速度沿轴正方向飞行,飞行高度和初始方位如图1所示,和分别为载机和载机的初始方位角,和分别为载机和载机的擦地角,为双基地角。
各载机除接收自身发出的信号,还可接收来自其它载机发出的信号,因此双基系统实际包含两个单基工作模式,即载机自发自收,载机自发自收,以及载机与载机之间互相收发的双基模式。与互相收发形成的双基系统可以等效为视线沿双基地角平分线的单基工作模式,两载机连线与双基地角平分线的交点位置是等效后的单基载机平台位置。
目标的3维转动矢量可以分解为雷达视线坐标系上的水平转动矢量和垂直转动矢量,分别如图1中的和所示。利用水平转动矢量可得到舰船的侧视图,利用垂直转动矢量可得到舰船的俯视图。由图1可以得到各平台的水平转动矢量和垂直转动矢量与舰船3维转动矢量,以及载机与舰船相对运动矢量的关系如下:
图1 多基ISAR对舰船成像几何示意图

(2)

(6)
可见,综合各个平台数据后获得的总转角要明显大于单个雷达平台的转角,可显著提高舰船图像的方位向分辨率。但是,为有效综合各平台数据,需要保证多个平台之间转角的连续性。由图2可知,相对平台的初始转角须介于相对平台的初始转角和终止转角之间,即
图2 最优成像时间段内相对于不同雷达平台构成的成像转角, 的变化示意图

(8)
因此,各雷达平台初始设置需满足

(10)
由式(9)和式(10)可知,多基ISAR成像各平台初始方位角和擦地角设置与成像积累时间和舰船相对于各平台的垂直和水平转动角速度有关。
由于成像积累时间通常较短,在1/10 s(海情高)或秒量级(海面较平静),而且由舰船摇摆和载机运动经验数据可知,机舰相对转速通常在1/100量级,各平台方位角差异和擦地角差异很小,通常不到,因此不同平台的水平和垂直转动矢量可近似相等,令,。式(5)、式(6)、式(9)和式(10)变为

(12)
以上讨论的是双基情况,该方法可扩展至多基模式,可进一步提高舰船图像的方位分辨率。
3 多基ISAR舰船侧视和俯视成像算法
本节给出多基ISAR舰船侧视和俯视成像算法,具体包括以下步骤:
(1) 最优成像时间段选择对某一平台的回波数据进行短时距离多普勒(RD)成像处理,获得一系列舰船图像,然后通过计算舰船图像多普勒展宽和舰船中心线斜率来估计有效转动矢量、垂直转动矢量和水平转动矢量。当有效转动矢量较大时,表明海面不平静,此时选择有效转动矢量较大而垂直转动矢量较小的时刻作为舰船侧视图成像的最优时刻;当有效转动矢量较小时,表明海面较平静,此时选择垂直转动矢量较大的时刻作为俯视图成像的最优时刻。成像所需积累时间利用图像对比度最大准则确定。
(2) 平台间相位补偿 对各平台接收回波数据进行相位补偿,以校正各平台与目标中心距离不同而产生的相位误差。
(5) 多平台数据融合 将步骤(4)中不同平台时移后的回波数据在时域中拼接起来。
(6) 运动补偿 补偿载机和舰船之间的平动矢量。本文采用全局最小熵方法完成距离对准,采用相位梯度自聚焦方法完成相位补偿。
(7) 对综合后的数据在方位向进行快速傅里叶变换(FFT),完成成像。
图3给出完整的多基ISAR舰船侧视和俯视成像算法流程图。
4 实验结果与分析
本节对上文给出的多基ISAR成像方法进行仿真验证。仿真中采用的多散射点舰船模型如图4所示,目标主要尺寸如图中标注,该模型共包含301个散射点,各散射点坐标间距为5 m,散射点的反射系数均设为单位值。仿真中未考虑遮挡效应。成像几何关系如图1所示,具体仿真系统参数与舰船运动参数如表1所示。假设成像起始时刻载机距地面高度,与舰船的斜距为,方位角,擦地角/。假设载机与载机的方位角之差为,擦地角之差为。需要指出,此处和的设置是参考舰船相对载机的垂直转动角速度和水平转动角速度,详见下述。
假设一次连续采集10 s的回波数据,由舰船和载机运动参数计算出相对平台的水平转动矢量和垂直转动矢量,如图5中虚线所示。根据和随时间变化曲线,通过最优成像时间选择,选定作为俯视图最优成像中心时刻,该时刻对应的为;选定作为侧视图最优成像中心时刻,该时刻对应的为。两个数据段长度均选为。
图3 多基ISAR舰船侧视和俯视成像算法流程图
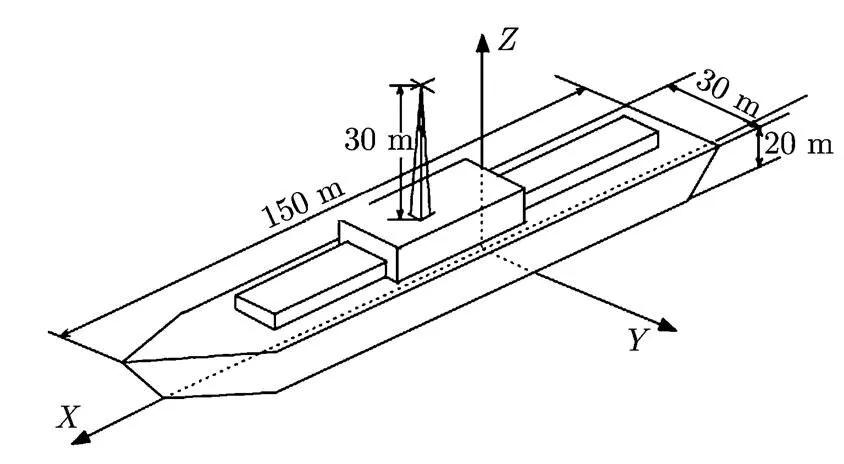
图4 舰船模型
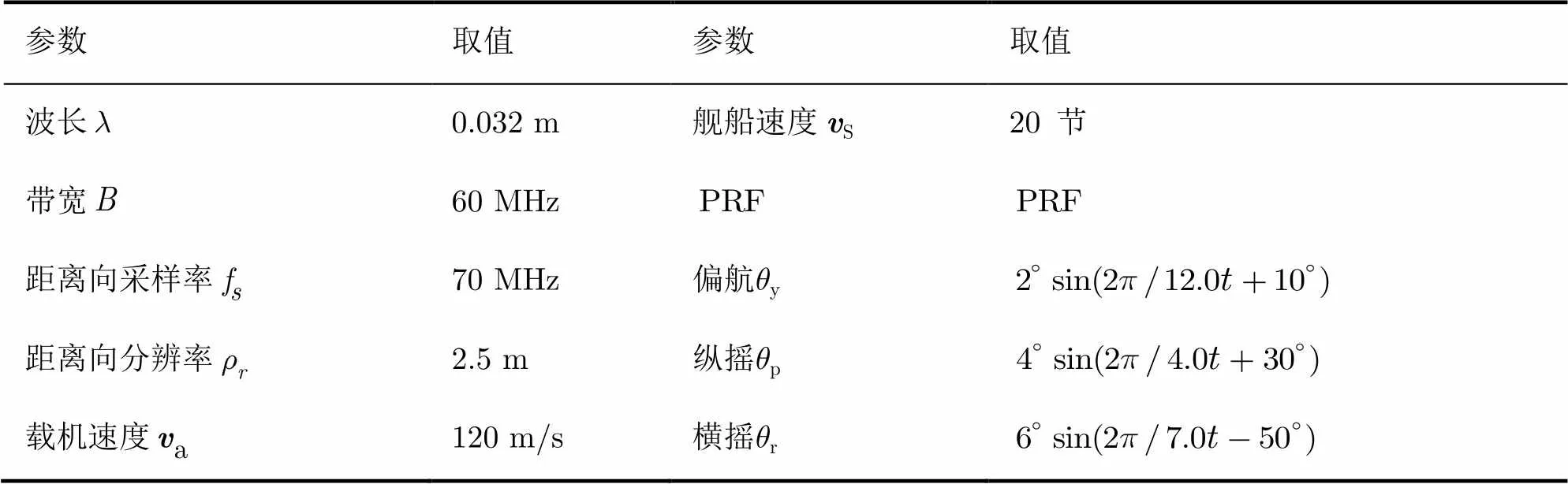
运用本文所述多基ISAR成像算法分别对以上两个时间段进行成像,得到舰船的俯视及侧视图,如图6和图7所示。图6(a)和图6(b)分别为单基ISAR和本文多基成像算法所得舰船俯视图。图7(a)和图7(b)分别为单基ISAR和本文多基成像算法所得舰船侧视图。对比图6(a)和图6(b)可以看出,图6(b)的舰船俯视图轮廓明显比图6(a)清晰,很容易分辨出船头和船尾。比较图7(a)和图7(b)可发现,图7(b)的分辨率高于图7(a),船身及桅杆上的散射点清晰可辨。
为了进一步验证本文多基ISAR成像算法的有效性,图8分别给出了上述不同数据段成像结果中某散射点所在距离单元的方位向幅度剖面。由图8(a)和图8(b)可以明显看出,运用本文多基ISAR成像算法后,方位向分辨率提高了大约3倍,这与前面的理论分析一致。
上述仿真的成像结果及某散射点的方位向剖面分析验证了本文算法的有效性,说明通过合理配置各平台的位置,并结合最优成像时间选择技术,可以得到高分辨率的舰船俯视和侧视图像。
表1 仿真参数
参数取值参数取值 波长0.032 m舰船速度vS20 节 带宽60 MHz 距离向采样率70 MHz偏航qy 距离向分辨率2.5 m纵摇qp 载机速度120 m/s横摇qr
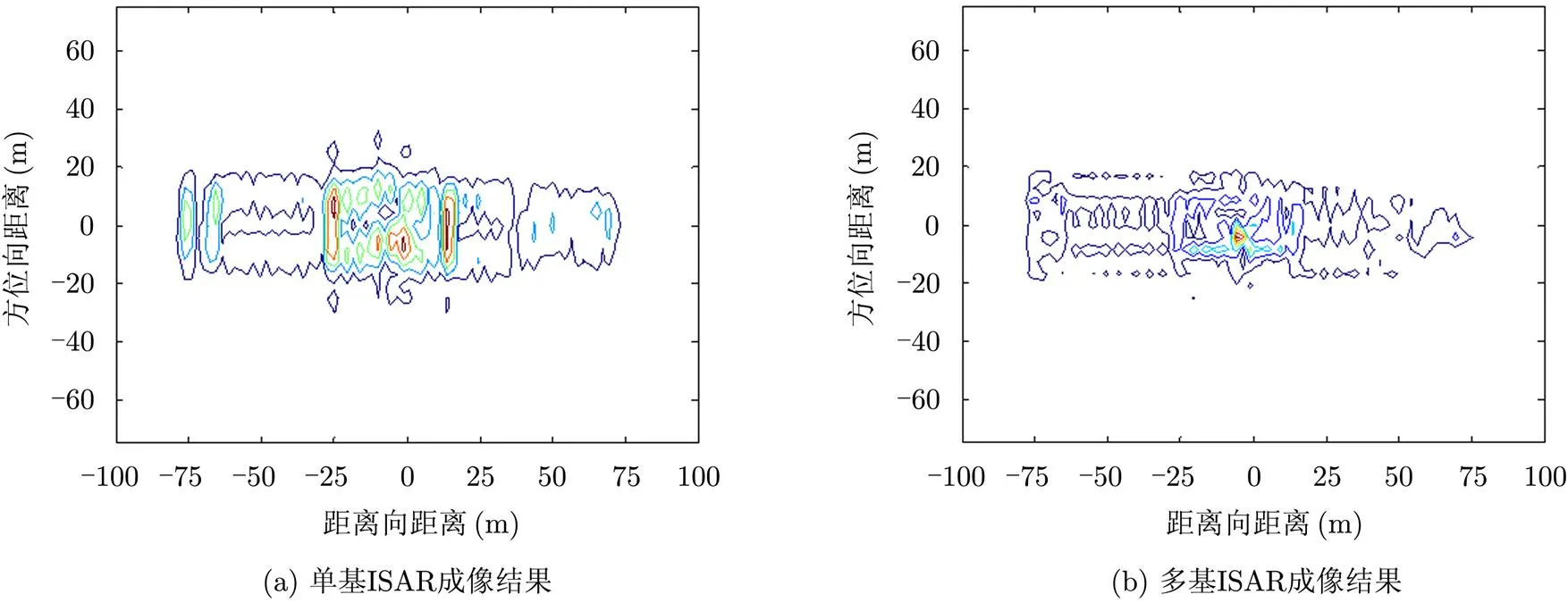
图6 第1个数据段成像结果(中心时刻为)
图7 第2个数据段成像结果(中心时刻为)
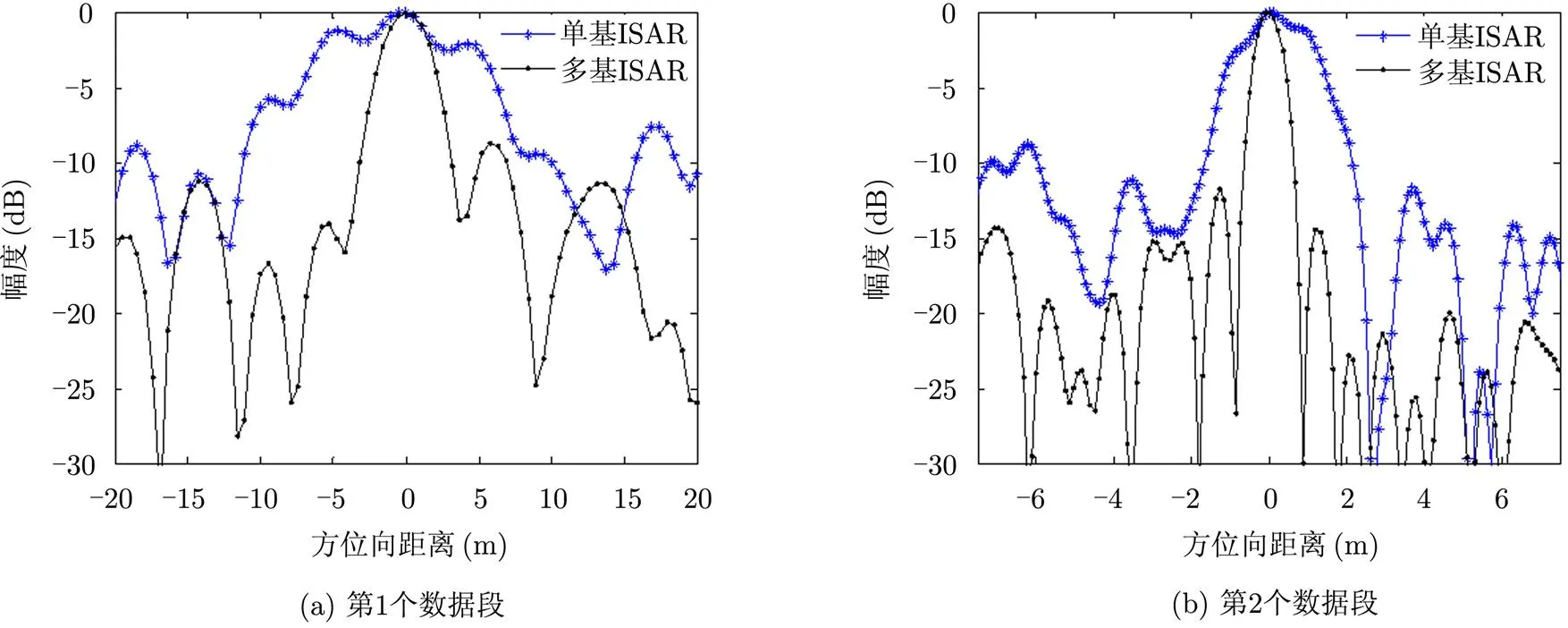
图8 单基ISAR与本文多基ISAR成像结果某散射点的方位向剖面比较
5 结论
舰船是一类非常重要的军事目标,研究如何获得高质量且有利于识别的舰船图像是一项极具战略意义的任务。本文在深入研究舰船运动规律及已有研究成果的基础上,给出了一种舰船侧视和俯视多基ISAR成像算法,详细阐述了该算法提高目标成像方位向分辨率的原理,给出了算法的处理流程及其中关键步骤的分析。舰船仿真数据的处理结果验证了算法的正确性和有效性。该算法通过融合多个雷达平台获取的数据,可以同时提高舰船目标的侧视和俯视的方位向分辨率,得到高分辨的舰船侧视及俯视图像。
[1] Chen C C and Andrews H C. Target motion induced radar imaging[J]., 1980, 16(1): 2-14.
[2] Doerry A W. Ship dynamics for maritime ISAR imaging[R]. SANDIA Report: SAND2008-1020, February 2008.
[3] 句彦伟, 于立, 王洋. 基于时频分析的ISAR瞬时成像算法[J]. 现代雷达, 2009, 31(7): 46-49.
Ju Yan-wei, Yu Li, and Wang Yang. ISAR instantaneous imaging algorithm based on time-frequency analysis[J]., 2009, 31(7): 46-49.
[4] Pastina D, Montanari A, and Aprile A. Motion estimation and optimum time selection for ship ISAR imaging[C]. IEEE Radar Conference, Huntsville, 2003: 7-14.
[5] Martorella M and Berizzi F. Time windowing for highly focused ISAR image reconstruction[J]., 2005, 41(3): 992-1007.
[6] Pastina D and Spina C. Slope-based frame selection and scaling technique for ship ISAR imaging[J]., 2008, 2(3): 265-276.
[7] 彭石宝, 许稼, 向家彬, 等. 基于相位线性度的ISAR非平稳目标成像时间选择新算法[J]. 电子与信息学报, 2010, 32(12): 2795-2801.
Peng Shi-bao, Xu Jia, Xiang Jia-bin,.. A novel ISAR imaging time selection method for maneuvering target based on phase linear degree[J].&, 2010, 32(12): 2795-2801.
[8] 汪玲, 朱兆达, 朱岱寅. 机载ISAR舰船侧视和俯视成像时间段选择[J]. 电子与信息学报, 2008, 30(12): 2835-2839.
Wang Ling, Zhu Zhao-da, and Zhu Dai-yin. Interval selections for side-view or top-view imaging of ship targets with airborne ISAR[J].&, 2008, 30(12): 2835-2839.
[9] Pastina D, Bucciarelli M, and Lombardo P. Multistatic and MIMO distributed ISAR for enhanced cross-range resolution of rotating targets[J]., 2010, 48(8): 3300-3317.
[10] Bucciarelli M and Pastina D. Multi-grazing ISAR for side-view imaging with improved cross-range resolution[C]. IEEE Radar Conference, Kansas, 2011: 939-944.
[11] Martorella M. On bistatic inverse synthetic aperture radar[J]., 2007, 43(3): 1125-1134.
[12] Correll B. Efficient Spotlight SAR MIMO linear collection configurations[J]., 2010, 4(1): 33-39.
[13] Zhu Dai-yin, Wang Ling, Yu Yu-sheng,.. Robust ISAR range alignment via minimizing the entroy of the average range profile[J]., 2009, 6(2): 204-208.
[14] Wahl D E, Eichel P H, Ghiglia D C,.. Phase gradient autofocus—a robust tool for high-resolution SAR phase correction[J]., 1994, 30(3): 827-835.
High-resolution Side-view and Top-view Imaging Method of Ship Targets Using Multistatic ISAR
Li Ning Wang Ling Zhang Gong
(College of Electronic Information Engineering, Nanjing University of Aeronautics and Astronautics,Nanjing 210016, China)
How to obtain high-resolution images of ship targets is an active research area in radar field due to the complexity of the ship motion. At the same time, multi-platform based surveillance and combat mode is gaining more and more interests in recent years. Based on the above situation, in this paper, a multistatic Inverse Synthetic Aperture Radar (ISAR) ship imaging method is presented, the method is capable of increasing the integration time for stationary imaging by deploying the multiple platforms with appropriate altitudes and aspect angles and coherently integrating the echoes received by each platform. Combined with the optimal imaging time selection scheme, this method can obtain side-view or top-view ship images with higher-resolution as compared to the monostatic radar. Simulations are performed to verify the effectiveness of our multistatic ISAR ship imaging method.
Inverse Synthetic Aperture Radar (ISAR); Ship targets; Multistatic; Side-view; Top-view
TN958
A
2095-283X(2012)02-0163-08
10.3724/SP.J.1300.2012.20021
2012-04-05收到,2012-05-22改回;2012-06-08网络优先出版
国家自然科学基金(61001151)资助课题
汪玲 tulip_wling@nuaa.edu.cn
李宁(1987-)男,硕士,研究方向为逆合成孔径雷达(ISAR)成像。
汪玲,女,副教授,硕士生导师,研究领域为雷达成像,包括合成孔径雷达成像、逆合成孔径雷达(ISAR)成像、分布式孔径雷达成像、无源雷达成像等。
张弓(1964-),男,南京航空航天大学教授,博士生导师,南京航空航天大学通信与信息系统专业博士学位。中国宇航学会电磁信息专业委员会委员、中国电子学会高级会员、中国航空学会会员、IEEE会员。研究方向为雷达信号处理、目标探测与识别等。
E-mail: gzhang@nuaa.edu.cn
