不同转子结构无刷双馈电机的电磁和动态特性分析
2012-07-23胡堃,樊贝,薛冰
胡 堃,樊 贝,薛 冰
(中国矿业大学,江苏徐州221008)
0引 言
无刷双馈电机(以下简称BDFM)是近年来发展起来的一种新型交流感应电机[1]。其定子铁心中一般放置有两套独立的绕组;转子基本可分为两大类,即笼型转子和磁阻转子,两种转子的磁场调制机理不同。BDFM既可以作为交流调速电机,又能作为变速恒频发电机,且易于调节电机的有功功率和无功功率[2]。由于实现了无刷化,减小了维护的成本,提高了电机的可靠性。BDFM的控制绕组只承担了整个电机容量的一小部分功率,所以变频器的容量也相对减小。同时BDFM可以实现异步运行、亚同步、超同步等多种运行方式,因此对BDFM进行深入的研究具有十分重要的意义[3-6]。
BDFM的转子结构直接影响定子两套绕组之间的磁耦合,基本上决定了磁场调制作用的效果,同时转子结构的不同,电机的动态特性也会相应改变。现有的文献中,几乎没有对笼型转子和磁障式磁阻转子BDFM的牵入特性进行具体的对比分析,而且很多采用MATLAB/Simulink对BDFM的动态特性进行仿真,如文献[9]、文献[10],都做了很多简化和假设,如假设气隙均匀,忽略定子槽的开口,只考虑基波磁动势的影响等,而这些忽略的因素对分析电机的耦合场和动态特性有很大的影响。本文基于Ansoft/Maxwell 2D强大的电磁场有限元计算功能,设计了具有代表性的笼型转子和磁障式磁阻转子,分析对比了两种转子的磁场调制效果,为转子的进一步优化设计提供了参考。在此基础上,利用Ansoft/Maxwell中的二维瞬态有限元计算法分析对比了两种转子的牵入特性和负载变化时的稳定性,给出了相应的转速转矩波形。
1 BDFM的工作原理
BDFM的结构和工作原理在许多文献中都有描述,例如文献[3]中就有具体的叙述。本文为分析方便,在此对工作原理只做简单介绍。该电机的基本结构与普通电机的结构相似,但又有所不同,其中定子绕组分为单绕组结构和双绕组结构。在单绕组结构中,控制绕组和功率绕组共用一套绕组。在双绕组结构中,定子铁心中有功率和控制两套独立的绕组。功率绕组通入电网电源,极对数和频率分别记为pp和fp;控制绕组则由变频电源供电,极对数和频率分别记为pc和fc。两套定子绕组的极数通常不同,两者之间没有直接的电磁耦合作用,两套绕组的耦合完全依靠转子的调制[3],其中转子的极数为pr=pp+pc。当电机运行时,转子的转动使定子绕组两种不同极数的磁场相互耦合,从而实现电机的机电能量转换。目前由于双绕组设计容易实现和接线简单,大部分采用这种结构设计来仿真、实验和研究,结构原理如图1所示。

图1 BDFM的基本结构
通过对BDFM的磁动势分析和数学模型推导可知,BDFM稳态运行时,其转速n与两套绕组电源频率fp、fc和极对数 pp、pc有关。其转速 n表达式[3-10]:

由式(1)知,转速n与变频器的输出频率fc保持线性关系。当fc=0时,BDFM运行在自然同步状态下,此时BDFM具有普通同步电机的特性,调节控制绕组电流的幅值,就可以调节电机的功率因数;当fc≠0时,BDFM运行在双馈调速状态下,fc前取“+”时,表示通入两套绕组的电流同相序[4],BDFM工作在超同步状态;fc前取“-”时,表示通入两套绕组的电流反相序,BDFM工作在亚同步状态,此时通过调节控制绕组电流的幅值和相位,就可以实现功率因数、无功功率和有功功率的调节;控制绕组短路时,BDFM的运行特性与异步电动机相似。可见BDFM工作在双馈调速状态时,其转速只与控制绕组频率fc有关,通过改变fc就可以方便地调节电机的转速。
2转子结构的设计
BDFM的转子是整个电机设计最为关键的部分,因为不同极数的定子绕组磁场需要在转子中进行调制,其调制能力的强弱直接影响到电机的耦合能力和功率密度等相关特性,因此转子的结构在BDFM的设计中十分重要。考虑到定子两套绕组的极对数之间的关系对磁场耦合的影响,为了避免共存于同一电机中的两个不同极数的磁场产生不对称磁拉力和电磁噪声,要求:pp-pc≥2;为了减少和消除定子磁场的直接耦合,极对数需要满足偶数倍或3 倍的关系[5],即 pp=2kpc或 pp=3kpc,k=1,2,3,…。本文为了分析方便,综合考虑,选择功率绕组极数为6,控制绕组极数为2,即pr=4。本文BDFM定子部分完全相同,转子模型(其中笼型转子短路环在图中未画出)如图2所示,具体参数如表1、表2所示。

图2 BDFM转子模型
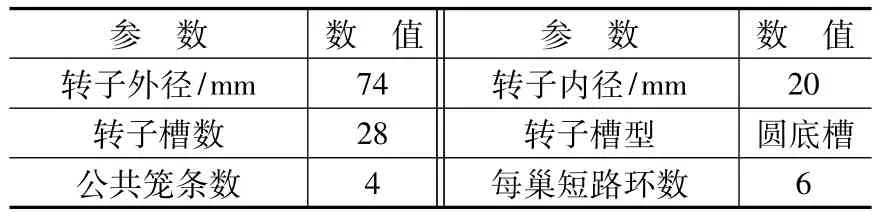
表1 笼型转子的设计参数
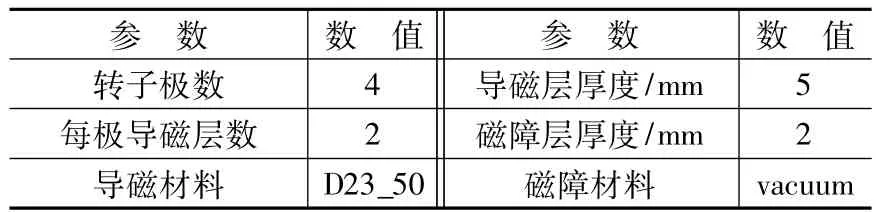
表2 磁障式磁阻转子的设计参数
3不同转子结构的BDFM的气隙磁密分析
为了比较不同转子结构的磁场调制效果,在上述建立的BDFM模型的功率绕组中通入380V、50Hz的工频电压,控制绕组短接。利用Ansoft/Maxwell进行有限元电磁场计算,得到的磁力线如图3所示,气隙磁通密度波如图4所示。

图3 BDFM功率绕组励磁时的磁力线
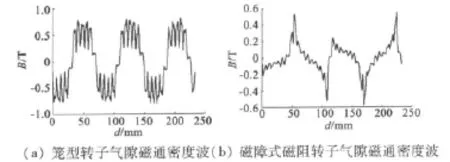
图4 BDFM功率绕组励磁时的气隙磁通密度波
由机电能量转换原理和pp=3,pc=1可知,当功率绕组励磁时,由图3、图4可以看出,在气隙磁场中含有极对数为3的基波磁场和与控制绕组极对数相同的谐波磁场,这两种谐波磁场是具有机电能量转换作用的有效次谐波磁场[6-8],故气隙中这两种谐波磁场含量的多少,直接关系到转子的磁场调制效果的好坏。为了更清楚地说明气隙谐波含量之间的关系,通过快速傅里叶变换,对气隙磁通密度波进行谐波频谱分析,以3次谐波为基准(气隙磁通谐波含量为100%),得到的结果如图5所示。
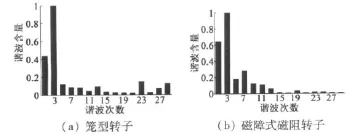
图5 BDFM功率绕组励磁时气隙磁通谐波含量
从图5中可以得到,笼型转子的基波含量为43%左右,磁障式磁阻转子的基波含量为64%左右,在相同条件下磁障式磁阻转子的磁场调制效果比笼型转子好。从图5中也可以得出,磁障式磁阻转子的高次谐波也较小,所以产生的谐波电动势也较小,电机损耗相对减少,可以提高电机效率。同时磁障式磁阻转子上没有绕组和导条,大大降低了转子铜耗、磁滞损耗和涡流损耗,转子无发热问题,从而该种转子可以作为BDFM转子优化设计的一个方向。
4 BDFM动态特性仿真研究
BDFM在控制绕组不同的供电方式下,将运行在不同的状态。其牵入能力直接关系到BDFM能否在不同的状态之间稳定地切换运行,包括由单馈异步到自然同步和单馈异步到亚同步、超同步三种情况。在实际应用中,BDFM可能只工作在一种状态下,但要实现自然同步、亚同步和超同步运行时,则必须要经过上述牵入过程,所以对不同转子BDFM的三种牵入过程和稳定性进行研究很有必要。
笼型转子的极数转换是靠转子电流来实现的[5]。状态转换时,由于电抗的存在,转子电流必然要经过一个电气调整过程,才能过渡到下一状态,机电时间常数较大,而磁障式磁阻转子依靠本身的磁阻作用来实现极数转换,则不存在上述问题,故理论上磁障式磁阻转子BDFM比笼型转子BDFM的动态响应能力快。为了便于比较分析,两种转子结构BDFM的功率绕组中都通入380 V、50 Hz的交流电,其中笼型转子BDFM在0.8 s时,采用“两并一串”通入20 V直流电、60 V、10 Hz正反相序的交流电,磁障式磁阻转子BDFM则在1 s时分别通入以上三种相同的电压,同时在1.5 s和1.8 s时给自然同步、亚同步和超同步运行的BDFM加上40 N·m的负载。
4.1自然同步运行动态特性
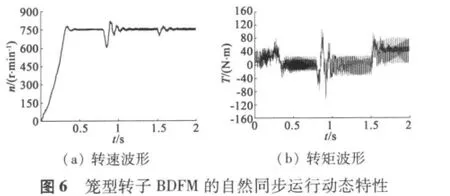
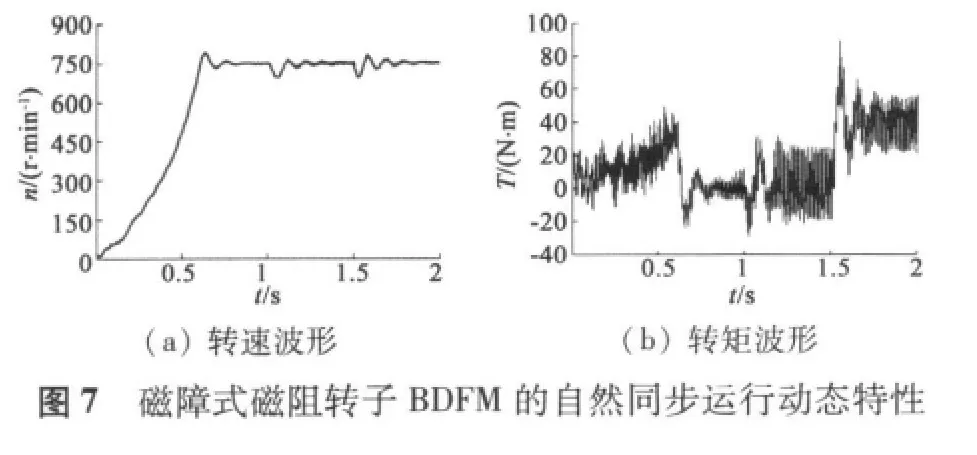
由图6、图7可以看出,两种转子结构BDFM均具有自起动能力,笼型转子的空载起动时间大约为0.44 s,最大起动转矩为80 N·m;磁障式磁阻转子的空载起动转矩较小,起动时间较长,大约为0.75 s,最大起动转矩为50 N·m。单馈异步运行时,稳态空载转速大约为750 r/min,转差率很小,转速较平稳。通入直流电以后,可以看到转速转矩在瞬间有比较大的波动。笼型转子结构BDFM的转速跌落至600 r/min,最大转矩波动为108 N·m,0.3 s过后转速被牵入在750 r/min;磁障式磁阻转子BDFM的转速波动较小,转速跌落到695 r/min,最大转矩波动为32 N·m,0.25 s后转速被牵入稳定在750 r/min,此时电机在自然同步状态下运行。带上40 N·m负载后,磁障式磁阻转子的转速转矩波动也较笼型转子小,笼型转子的最大波动转矩达到了94 N·m,磁障式磁阻转子则为88 N·m。所以由单馈异步牵入自然同步时,磁障式磁阻转子BDFM具有较好的动态响应能力,而且机械负载变化时稳定性也比笼型转子好。
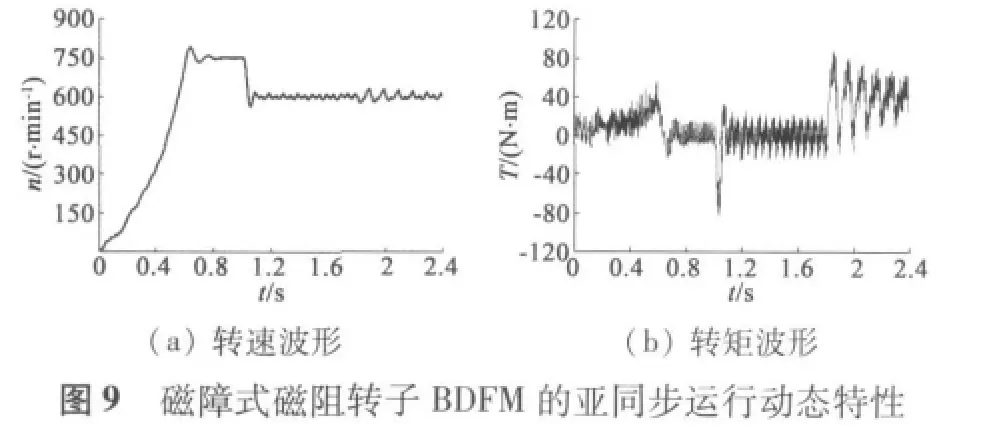
4.2亚同步运行动态特性
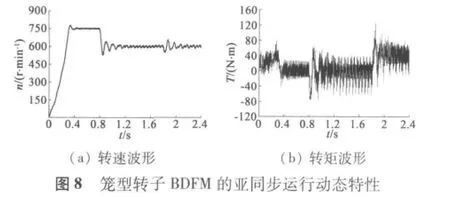
由图8、图9可以看到,通入反相序的交流电以后,笼型转子BDFM的转速跌落至530 r/min,最大转矩波动为-96 N·m,0.4 s后转速被牵入稳定在600 r/min;磁障式磁阻转子BDFM在被牵入亚同步后转速波动较小,转速跌落到570 r/min,最大转矩波动为-82 N·m,0.2 s后转速被牵入稳定在600 r/min。电机带上40 N·m的负载后,笼型转子的转矩波动较大,最大达到了128 N·m;而磁障式磁阻转子则为90 N·m,说明由单馈异步牵入亚同步情况下,磁障式磁阻转子BDFM不但具有较好的牵入特性,而且带载稳定性也较好,在电机最大负载限度内,转速维持不变,体现了良好的同步电机特性。
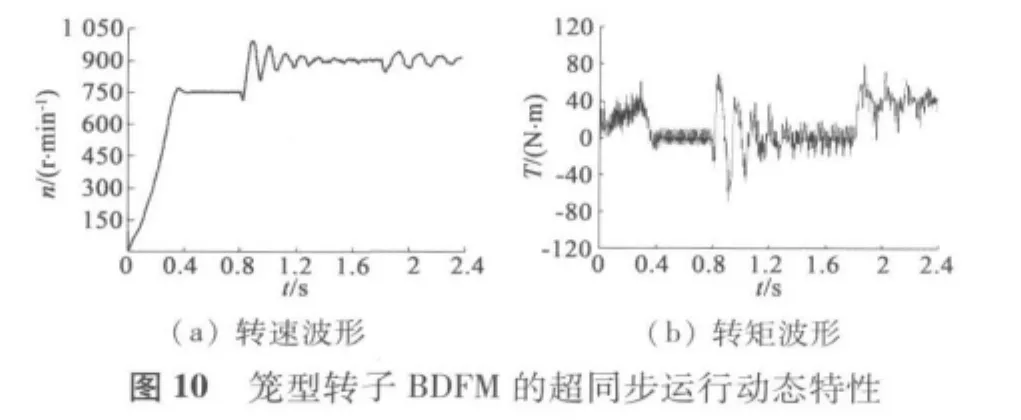
4.3超同步运行动态特性
由图10、图11可以看出,笼型转子BDFM的转速在0.08 s内提升至990 r/min,最大转矩波动为72 N·m,在0.6 s后转速被牵入稳定在900 r/min;磁障式磁阻转子BDFM在被牵入超同步后转速波动较小,在0.04 s内提升到958 r/min,最大转矩波动为82 N·m,在0.55 s后转速被牵入稳定在900 r/min。电机带上40 N·m负载后,笼型转子最大转矩波动为80 N·m;而磁障式磁阻转子则为83 N·m,可以看到转速的波动还是比较大,达到稳定的时间也比亚同步长。说明由单馈异步牵入超同步情况下,磁障式磁阻转子BDFM比笼型转子BDFM具有更好的牵入特性,这与牵入亚同步相似,但在稳定性方面两种转子都不太理想,这与文献[4]中得到的在双馈运行时尽可能工作于同步速和亚同步速,以保证电机具有较高的稳定性相一致。
综上所述,两种转子在不同的运行方式下,转速大小与式(1)的理论值完全相等,从而说明上述建立的有限元模型和仿真结果的正确性。同时在相同激励和外部条件下,笼型转子BDFM具有较好的起动性能,而磁障式磁阻转子BDFM具有较好的牵入动态特性,即状态转换后经动态调整达到稳态转速的时间较短,实际仿真结果与理论分析相一致。

5结 论
本文对两种典型转子的气隙磁场进行了比较系统的有限元计算,通过谐波频谱分析,对比了两种转子的磁场调制效果。同时对比分析了两种转子的起动、牵入特性和机械负载变化时的稳定性。从而得到如下的结论:
(1)由频谱分析可知,磁障式磁阻转子的磁场调制效果要好于笼型转子。
(2)单馈异步空载起动时,笼型转子起动转矩大,起动时间短,而磁障式磁阻转子由于本身结构的原因,起动转矩小,起动时间较长。
(3)在由单馈异步运行牵入自然同步、亚同步和超同步运行时,磁障式磁阻转子的动态响应比笼型转子快,响应时间短。但在超同步运行时,两种转子稳定性方面都比在自然同步和亚同步运行时稍差一些。
今后研究的重点还是在转子的优化设计上,希望本文的仿真和结论,能够为BDFM的研究工作者提供一定的参考。
[1] Will Iamson S,Ferre Ira A C,Wallace A K.Generalised theory of the brushless doubly-fed machine Part 1:Analysis[J].IEE Proceedings Electric Power Application,1997,144(2):111-122.
[2] 黄守道,王耀南,王毅,等.无刷双馈电机有功和无功功率控制研究[J].中国电机工程学报,2005,25(4):87-93.
[3] 邓先明,姜建国.无刷双馈电机的工作原理及电磁设计[J].中国电机工程学报,2003,23(11):126-127.
[4] 胡堃,伍小杰,邓先明.无刷双馈电机的工作特性测试[J].煤矿机械,2007,28(6):60-61.
[5] 邓先明.无刷双馈电机的电磁分析与设计应用[M].北京:机械工业出版社,2008.
[6] 王凤翔,张凤阁,徐隆亚.不同转子结构无刷双馈电机转子磁藕合作用的对比分析[J]电机与控制学报,1999,3(2):114-116.
[7] 韩力,高强,罗辞勇,等.无刷双馈电机笼型转子结构对磁场调制的影响[J].电机与控制学报 ,2009,13(2):164-165.
[8] 韩力,高强,罗辞勇,等.不同转子结构无刷双馈电机的运行特性对比[J].中国电机工程学报,2010,14(3):8-11.
[9] 邓先明,张海忠,拾华杰.笼型转子无刷双馈电机起动特性分析[J].电机与控制学报,2008,12(5):546-549.
[10] 黄守道,罗军波,彭晓,等.基于Matlab的无刷双馈电机建模与仿真[J].湖南大学学报,2002,29(6):72-75.