波轮洗衣机用永磁同步电机控制系统
2012-07-23黄腾云姜淑忠李小海
黄腾云,姜淑忠,李小海
(上海交通大学,上海200030)
0引 言
现有的波轮洗衣机主要用单相电容运转异步电动机和单相串励换向器电动机作为动力,运行效率低,洗涤、脱水转速不可调或调速效率低,噪声大,不能满足高效率、低噪声以及不同面料衣服的洗涤需求[1]。
永磁同步电动机(以下简称PMSM)与单相异步电动机相比具有功率密度大、效率高、噪声低等优点,因此PMSM越来越多地用于波轮洗衣机。由文献[2]可知,为了产生平滑的转矩以及减小电磁噪声,需要使相电流与反电动势同相位。对传统的开环的调频调压 SPWM控制算法,由逆变器供给PMSM的相电压为与反电动势同相位的正弦波。由于PMSM为感性负载,相电流会滞后于相电压,无法保持定子电流综合向量超前转子磁极90°电角度,因而传统的SPWM较难取得平滑电磁转矩。而转子磁场定向控制通过矢量变换将定子电流由静止的三相坐标系的iA、iB、iC变换为与转子磁场同步旋转的两相坐标系的励磁分量id和转矩分量iq,这样就可以保证定子电流的转矩分量超前转子磁场90°,取得平滑的电磁转矩。
本文针对波轮洗衣机的负载特性,设计了一种波轮洗衣机用PMSM矢量控制系统。该系统采用3个霍尔元件作为转子位置传感器,采用2个下桥臂采样电阻检测相电流,成本低、效率高、噪声低。实验结果表明,该系统可以很好地满足波轮洗衣机在洗涤和脱水状态下的要求,具有很好的推广价值。
1 PMSM的矢量控制
矢量控制是以产生同样的旋转磁动势为准则,将三相坐标系上的定子交流电流 iA、iB、iC通过Clarke变换等效成两相静止坐标系上的交流电流iα和iβ,再通过Park变换等效成同步旋转坐标系上的直流电流id和iq[3]。转子磁场定向的矢量控制是使同步旋转坐标系的d轴与转子磁链ψr保持一致[4],其中磁链方程:

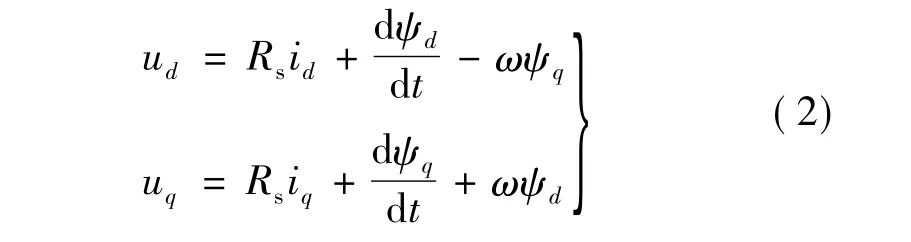
电压方程:
电磁转矩方程:

对成本有严格要求的波轮洗衣机采用的是外转子结构、磁钢为表贴的永磁同步电动机。因此式(3)可以简化:

式中:ψd、ψq、ud、uq、id、iq、Ld、Lq分别为 d-q 轴磁链、电压、电流和电感;ψf为永磁体转子产生的磁链。
波轮洗衣机在洗涤状态,根据不同的洗衣程序可选择的转速范围为200~800 r/min,经过减速比为6.5的机械机构带动波轮旋转。在脱水状态有300 r/min、500 r/min、700 r/min、900 r/min 四种转速可选择,直接带动外筒旋转。根据波轮洗衣机的运行特性,本文采用的矢量控制系统如图1所示。
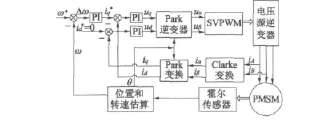
图1 PMSM矢量控制框图
波轮洗衣机在洗涤及脱水状态下,PMSM的运行转速均小于额定转速,可知PMSM工作在恒转矩运行区,因此可以采用id=0的矢量控制方式。由式(4)可知,在该种控制方式下,可以获得最高的转矩/电流的比值,电动机的铜耗也最小。并且通过磁场定向,达到了类似他励式直流电动机通过控制电枢电流直接控制转矩的目的,这样通过控制iq就可以直接控制电磁转矩[5]。
2转子位置估算
PMSM转子磁场定向矢量控制需要有准确的转子磁极的位置,这样才能将定子电流矢量变换到沿转子磁场定向的d-q轴,这是磁场定向控制的关键所在[6]。为了实现准确的磁场定向,因此需要高分辨率的转子位置传感器,例如光电编码器、旋转变压器等。但是这类传感器使得系统成本增加,并且易受高温、高湿等恶劣环境的影响。为此很多文献提出了无传感器的转子位置观测方法,但这些算法在起动和低速时容易出问题,不适合洗衣机的负载特性要求。霍尔传感器具有价格便宜、运行可靠的优点,近年来被广泛应用于PMSM控制系统[7]。洗衣机应用场合对转子位置分辨率要求不高,但对成本有苛刻要求,因此霍尔传感器广泛应用于家用洗衣机中。
本系统采用3个锁存型霍尔提供转子位置信号,三个霍尔元件的安装位置两两互差120°电角度。当霍尔元件在S极上时,它的输出为高电平,否则,输出为低电平。PMSM连续旋转时,三个霍尔元件的输出信号如图2所示。由图2可知,霍尔信号为三相相隔120°电角度的方波,且各有180°的有效角度,这些信号把360°电角度分为6个60°电角度的霍尔扇区。也就是说每一个电周期,三个霍尔元件的分辨率为6个脉冲,对矢量控制直接用这6个状态来取得转子的位置是不够的,因此需要估算转子的位置和转速。
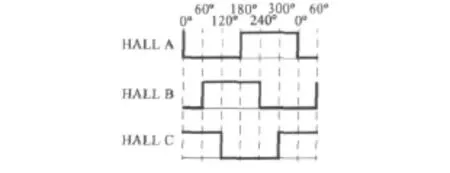
图2 三相霍尔信号
假设两个相邻的霍尔状态所间隔的时间为t,微处理器可通过定时器捕捉功能来记录下这个值,因而可知电机的平均电角速度:

Capponi根据泰勒展开式提出了转子位置和速度观测的算法,有零阶算法和一阶算法[8],即:
式中:θn为当前计算得到的转子位置角度,Ts为采样时间即一个载波周期,a为平均加速度,即:

在通过上述算法得到PMSM的转子角度后,单片机还需要判断所得到的角度是否在预期的范围之内。例如,估算出来的转子角度应满足30°≤θn+1≤90°,如果得到 θn+1< 30°或 θn+1> 90°,则将修正为θn+1=30°或θn+1=90°。并且单片机在每进入一个新的霍尔扇区时进行一次转子位置校正,以消除误差的累积。
上述算法随着阶数的增加,转子位置的误差必然会降低,但是会给单片机增加负担。而在波轮洗衣机应用场合,系统对转子位置的精度要求不是很高,因此可以采用零阶算法。
3电流检测
矢量控制的相电流检测通常是采用霍尔电流传感器,但该传感器成本较高。为了节约成本,人们提出了基于采样电阻的电流检测方法,此类方法有以下两种[9]。
一种为单电阻采样方法。该方法是通过采样直流母线上采样电阻上的电压,然后根据SVPWM输出的状态重构出三相定子电流。由于这种方法涉及的算法较复杂,所以本系统采用另外一种电流检测方法。
另外一种为双电阻采样方法。该方法是通过采样逆变电路的下桥臂任意两个电阻,再根据定子电流三相的矢量和为零,来推算出第三相的电流值,如图3所示。在下桥臂导通时检测采样电阻压降,也就是在SVPWM控制策略中零矢量作用时进行采样,这样就可以检测出定子相电流。该方法必须保证有足够长的时间来完成这两路电流的采样,以及需要在零矢量作用时间的中间时刻开始采样,以得到准确的相电流信息。

图3 双电阻电流采样电路
4实验结果及结论
控制驱动系统由整流电路、驱动电路、逆变电路、控制电路和PMSM构成,如图4所示。用户通过操作显示面板设定洗衣程序,上位机R8C/24根据洗衣程序检测水位、洗涤上盖,控制排水阀、进水阀,通过通信给下位机78K0R/Ix3发送运转及转速命令。
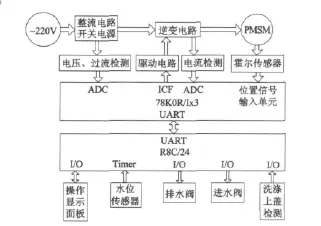
图4 系统构成框图
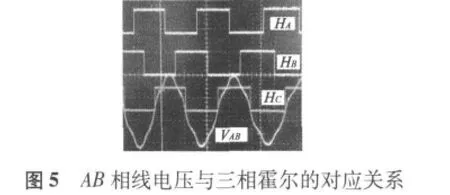
系统所用电机为一台12极、功率180 W、采用外转子结构且磁钢为表贴的PMSM。图5为三相霍尔信号与AB相线电压的对应关系。图6为在脱水状态转速为700 r/min时,其中一相的电流波形。图7为在洗涤状态下运行1.3 s、停止1 s其中一相的电流波形,从波形可以看出,该控制系统在洗涤和脱水两种状态都能达到较好的控制效果,满足洗衣机控制驱动系统高效率、低噪声、低成本的要求。该方法可应用到其他低成本的交流电机矢量控制的调速系统中。


[1] 李福和.洗衣机变频控制系统的开发应用[C]//中国家用电器技术大会论文集.2001:336-340.
[2] Todd D Batzel,Kwang Y Lee.Commutation torque ripple minimization for permanent magnet synchronous machines with Hall effect position feedback[J].IEEE Transactions on Energy Conversion,1998,13(3):257-262.
[3] 陈伯时.电力拖动自动控制系统[M].北京:机械工业出版社,2003.
[4] 谢宝昌,任永德.电机的DSP控制技术及其应用[M].北京:北京航空航天大学出版社,2005.
[5] 高静,杨贵杰,苏建勇.高性能低成本滚筒洗衣机用PMSM矢量控制系统[J].微特电机,2010(10):34-38.
[6] 王成元,周美文,郭庆鼎.矢量控制交流伺服驱动电动机[M].北京:机械工业出版社,1995.
[7] Batzel T D,Lee K Y.Slotless permanent magnet synchronous motor operation without a high resolution rotor angle sensor[J].IEEE Trans on Energy Conversion,2000,15(4):366-371.
[8] Giulii Capponi F,De Donato G,Del Ferraro L.Brushless AC Drive Using An Axial Flux Synchronous Motor With Low Resolution Position Sensors[C]//Proc.of IEEE 35th Annual Power Electronics Specialists Conference.2004:2287-2292.
[9] Parasiliti F,Petrella R,Tursini M.Low Cost Phase Current Sensing in DSP Based AC Drives[C]//ISIE.1999:1284-1289.