3000t铺管起重船铺管作业锚泊定位系统设计研究
2012-07-23盛庆武
盛 庆 武
(上海佳豪船舶工程设计股份有限公司,上海 200233)
1 铺管作业概述
铺管船是一种专门用于海底管线铺设的特种工程船舶。固定式托管架连接在船尾,以保证管子在入水时有一个合适的弯曲度,对于浅水近海(10~450m)管道铺设,一般采用S形铺设方法,管道在下海输送过程中呈S形变形曲线。此时,张紧器在甲板上施加张紧力,管道下海过程中的张紧力和管线变形必须有监控,防止应力和应变超过管线设计允许量。
图1为典型铺管S曲线,管线分为3部分:直管段、上弯段和下弯段,张紧器控制管线的张力,铺管船滚轮和托管架滚轮支撑铺设的管线。通常,铺管船需要沿特定的路线前进,在行进过程中,需要保证铺管船管线上的应力不应过高,这需要通过张紧器来保持管子上的张力。管子的允许张力和船舶位置变化的允许公差根据管子直径和铺管位置的水深来确定。
锚泊定位系统是一个非常复杂的系统,具体表现为:1)由于铺管船在铺管作业时一直向前移动,在移动过程中具有一定的移动速度,在一定距离的移船过程中,锚在固定坐标系中的位置始终保持不变,锚泊线随时间推移其长度发生变化,具有很强的非线性,直接计算将是非常复杂的问题;

图1 典型铺管S曲线
2)铺管作业时,要求船体在特定的环境载荷作用下水平方向的位移较小,同时导缆孔处的轴向最大张力不大于锚绞车移船的设计张力,锚上作用的水平方向的拉力不超过锚的最大抓力以及锚的垂向不受力,以避免发生走锚现象,这样的约束条件对锚泊定位系统要求较高,需要做深入细致的研究;
3)由于在船舶设计初期可能针对特定的海域,或者对指定的海域内风、浪和流等的统计资料不完备,因此,在铺管作业时确定海上的风、浪和流等环境条件比较困难。
2 铺管作业时运动响应及二阶平均波浪载荷响应计算分析
3000t铺管起重船为非自航浅水铺管起重船,配备辅助推进器,可短距离移泊,能够铺设最大水深为300m的海底管线。在主甲板右舷设有铺管作业线,左舷设有管线储存区,船尾设有固定式托管架。该船总长169.00m,水线间长165.00m,型宽46.00m,型深13.50m。铺管作业时使用12点非对称锚泊定位系统。采用多种专业软件和应用软件包括NAPA软件(船舶总体设计软件)、HydroStar软件(用于评估海上结构物一阶及二阶波浪载荷和运动响应的三维绕射/辐射软件)、ARIANE 7软件(系泊分析软件)和MATLAB软件(用于计算前后处理和谱分析等)及各自开发的模块或程序组成的软件集成系统,作为3000t铺管起重船铺管作业锚泊定位系统设计研究的计算平台。
2.1 计算典型装载工况
本文仅限甲板上装载5000t(满载)管线100%油水工况进行耐波性研究,表1为3000t铺管起重船铺管作业装载5000t(满载)管线100%油水工况的浮态参数:

表1 装载5000t(满载)管线100%油水工况的浮态参数 m
2.2 计算输入参数
2.2.1 网格图
首先,对典型装载工况划分网格图,该船网格数共1984个。图2为该工况网格划分图。
2.2.2 计算波浪圆频率和浪向
计算波浪圆频率共 49个,从 0.1rad/m至2.5rad/m间隔为 0.05。由于船体纵向对称性,计算浪向共13个,从0~180°,间隔为15°。
2.2.3 铺管作业波浪条件
有义波高为2.5m,波浪周期(波峰):Tp= 6 .0~12.0s 。波谱为Jonswap谱,其中γ=1.0。
2.2.4 耐波性能指标
运动性能指标:纵荡(Surge)、横荡(Sway)、垂荡(Heave)、纵摇(Pitch)、横摇(Roll))和艏摇(YAW)运动响应,见图3。二阶波浪平均载荷:纵向二阶波浪平均力(Fx)响应、横向二阶波浪平均力(Fy)响应和二阶波浪平均艏摇力矩(Mz)响应,见图4。

图2 该工况网格划分
2.3 计算结果分析
图3 、4分别为3000t铺管起重船铺管作业装载5000t(满载)管线100%油水工况时不同角度(deg)的纵荡、横荡、垂荡、横摇、纵摇和艏摇运动响应传递函数(RAO)和二阶波浪平均载荷传递函数。
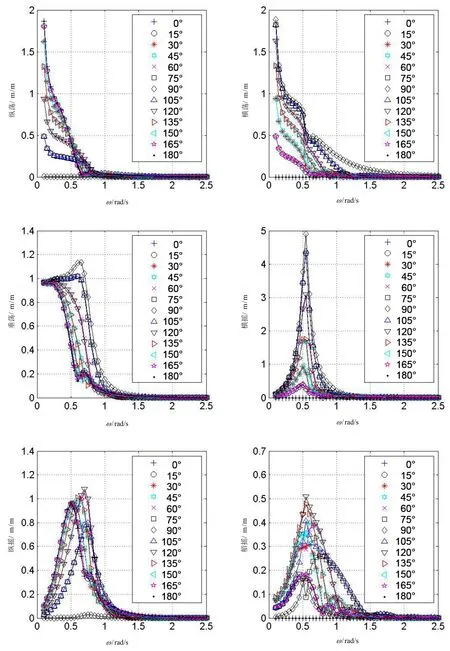
图3 运动响应函数

图4 二阶平均波浪载荷传递函数
3 锚泊定位系统计算和分析
3.1 锚泊定位系统配置参数
锚泊定位系统的主要参数,是根据母型船的锚泊定位系统进行初步选择,并按设计任务书有关水深和环境条件的要求确定。
3.1.1 锚索
该船配备了12条镀锌钢丝绳工作锚锚索,每条锚索长3000m,直径76mm,破断力为3800kN,每条锚索在空气中的重量为24.32kg/m,而在水中的重量为19.58kg/m。
3.1.2 定位锚机
设置电动变频带阻尼刹车的铺管定位绞车12 台。绞车主要技术参数:
钢丝绳直径为76mm;绞车中间层拉力为1100kN;主刹车支持负载(滚筒第三层)为3800kN;容绳量为3000m。
3.1.3 锚
设置10个STEVPRIS 型海洋工程大抓力锚,每个重量初步定为12t,锚的抓重比系数为10,最大抓力为120t,即1176kN。
3.2 铺管作业设计环境条件
该船作业区域为中国南海、东海、渤海以及东南亚、西非、波斯湾浅水海域。作业计算水深取最深工作水深300m。
该船可在下列环境条件下作业:波浪有义波高2.5m,波浪周期(波峰)为6.0~12.0s,波谱使用Jonswap(取γ=1.0);流速为2.0kn;风速为16m/s。计算中将风、浪和流的设计载荷均按横向(由东向西)施加,以此获得最大的横向运动和波浪载荷。并依据API规范要求,风、浪和流载荷分别在南偏东30°和北偏东30°方向时对铺管作业时所设计锚泊定位系统的运动和受力情况进行校核,这样设计环境载荷认为给定了环境条件组合的极端情况,由此可确定锚泊定位系统导缆孔处的最大张力和最大水平位移,以确认该锚泊定位系统的合理性及适用性。限于篇幅,本文仅对横向环境载荷下锚泊定位系统进行设计研究。
3.3 铺管作业锚泊定位系统设计原则、设计方式和锚泊定位能力评估指标
3.3.1 设计原则
该船的铺管作业锚泊定位系统为 12点非对称锚泊系统。铺管作业过程中抛锚和起锚需要花费不少时间,而铺管作业又非常依赖于好的“窗口”(设计环境条件范围内),所以在铺管作业过程中应尽可能减少起锚次数,以提高工作效率和日铺管公里数,这是铺管作业最根本的要求。因此,在铺管作业向前移船时,艏部锚泊线收紧,艉部锚泊线放长,这样在一次抛锚后至起锚期间整个铺管作业中锚泊定位系统的锚泊线长度随着船舶前移其各种相关的参数均会发生变化,也就是铺管起重船在不同位置组成了若干个“新”的锚泊定位系统,每个新的锚泊定位系统又都要进行新的设计、计算和分析,以达到设计要求。因此,铺管作业时锚泊定位系统的设计原则应确保如下几点:
1)铺管起重船横向振荡运动的平衡位置应始终处于海底管线要求的路线上;
2)铺管起重船横向、纵向和艏摇运动的幅值保持在一定数值范围内;
3)锚泊定位系统上的设计张力取每条锚泊线破断张力(取锚链和锚索的最小破断张力)除以安全系数的值、绞车中间层的拉力值和锚上最大水平抓力三者之间的小者;
4)锚垂向不受力,水平方向受到的力应小于该锚的最大抓力。
3.3.2 设计方式
根据上述设计原则,对3000t铺管起重船锚泊定位系统采取了如下的设计方式(为计算简化起见,假定铺管路线为直线):
1)首先设计作业时初始状态的锚泊定位系统(相当于在刚抛好锚后):确定锚的位置、锚泊线布置方式、锚泊线放出长度,通过施加环境载荷后对该锚泊定位系统计算后确定铺管起重船平衡位置和振荡运动幅值、导缆孔上的最大轴向张力以及作用在锚上的张力等,经校核结果满足设计要求(如不满足,需要重新设计、计算和分析锚泊定位系统)后完成铺管起重船在初始位置时的锚泊定位系统的设计;
2)根据上述的锚泊定位系统,固定各个锚的位置(锚的位置与初始状态的锚泊定位系统相同),每间隔20m通过对各锚泊线的收放确定“新”的锚泊定位系统,这个“新”的锚泊定位系统依然重复初始状态锚泊定位系统的设计方式,但是,每个“新”的锚泊定位系统必须与初始位置的锚泊定位系统的横向平衡位置基本保持在一条直线上,即海底管线要求的位置路线上;
3)对上述锚泊定位系统设计一直到铺管起重船移动到 200m的位置,作为铺管起重船前进的最大位置。
该船首部布置了6根锚泊线,在初始位置处于布放最长状态;艉部布置了6根锚泊线,在初始位置处于布放最短状态。在作业过程中艏部的6根锚泊线逐步收起,艉部的6根锚泊线逐步放出,这样在前进过程中,锚泊定位系统中各参数和变量是时间的函数,如果对该系统进行实时仿真分析,那么求解算法不仅复杂,而且计算量非常大,因此,需要用准静力的方法来分解该锚泊定位系统:将连续的锚泊定位系统分解成若干个离散锚泊定位系统,然后对这些离散锚泊定位系统做时域动力分析,这种方法能比较有效和合理地设计铺管作业时的锚泊定位系统。
3.3.3 锚泊定位能力评估指标
1)起重船在固定坐标系中的最大、最小和平均位移;
2)锚泊线导缆孔轴向最大张力。
3.4 风载和流载的计算方法
由于真实的风力系数和流力系数一般很难直接求得,需要通过风洞船模试验和拖曳水池船模试验的方法获得,但是这种方法费用很高,且试验周期较长。因此,现在通用的方法是依据已有的风力系数和流力系数的模型资料(目前OCIMF为通用方法),通过插值的方法来获得。有关风载和流载系数的计算方法参照文献[1]。
该船的迎纵向风的面积为1520m2,迎横向风的面积为4030 m2,风转动力矩作用点位于随船坐标系重心位置。
3.5 铺管作业铺管线在锚泊定位系统中的应用
对于铺管S曲线,其上的应力和弯矩可用海底管线设计计算分析软件如OFFPIPE等来计算分析,本文仅针对铺管作业锚泊定位系统的研究,对铺管线的运动和受力不作计算和分析。但是这段铺设到海底的管线对锚泊定位系统贡献不可以单纯地忽略不计。
在锚泊定位系统中,通过对张紧器原理的分析,可以看到张紧器上最大容许张力为100t,假定此力为65t左右(通常将60%~80%的最大容许张力的水平力作为作用在托管架上的设计张力)对铺管起重船的定位起作用,那么,锚泊定位系统假定在这个位置上又加了一条锚泊线,而这条锚泊线的作用只是提供 65t左右的具有振荡效应的水平力(可通过“假定”锚泊线上的刚度系数和单位长度重量等参数控制其振荡水平),且沿着铺管线铺设的方向,因此,对这根锚泊线上其他变量就不再校核了。假设了这条锚泊线后,整个锚泊定位系统成了“13点”非对称锚泊定位系统,注意这“第13根锚泊线”只是为了设计中更能接近真实锚泊定位系统的运动和受力分析而假定的,并不是真正的锚泊线。
3.6 锚泊定位系统位置及风、浪和流作用方向图
图5为 3000t铺管起重船铺管作业初始位置时的锚泊定位系统布置及风、浪和流的作用方向图,其他位置的布置图与此相似。
图5中固定坐标系X轴向北为正,Y轴向东为正,Z轴向下为正;随船坐标系x轴向北为正,y轴向东为正,z轴向下为正,两坐标系初始原点重合。图中的LINE表示锚泊线,anchor表示定位锚。
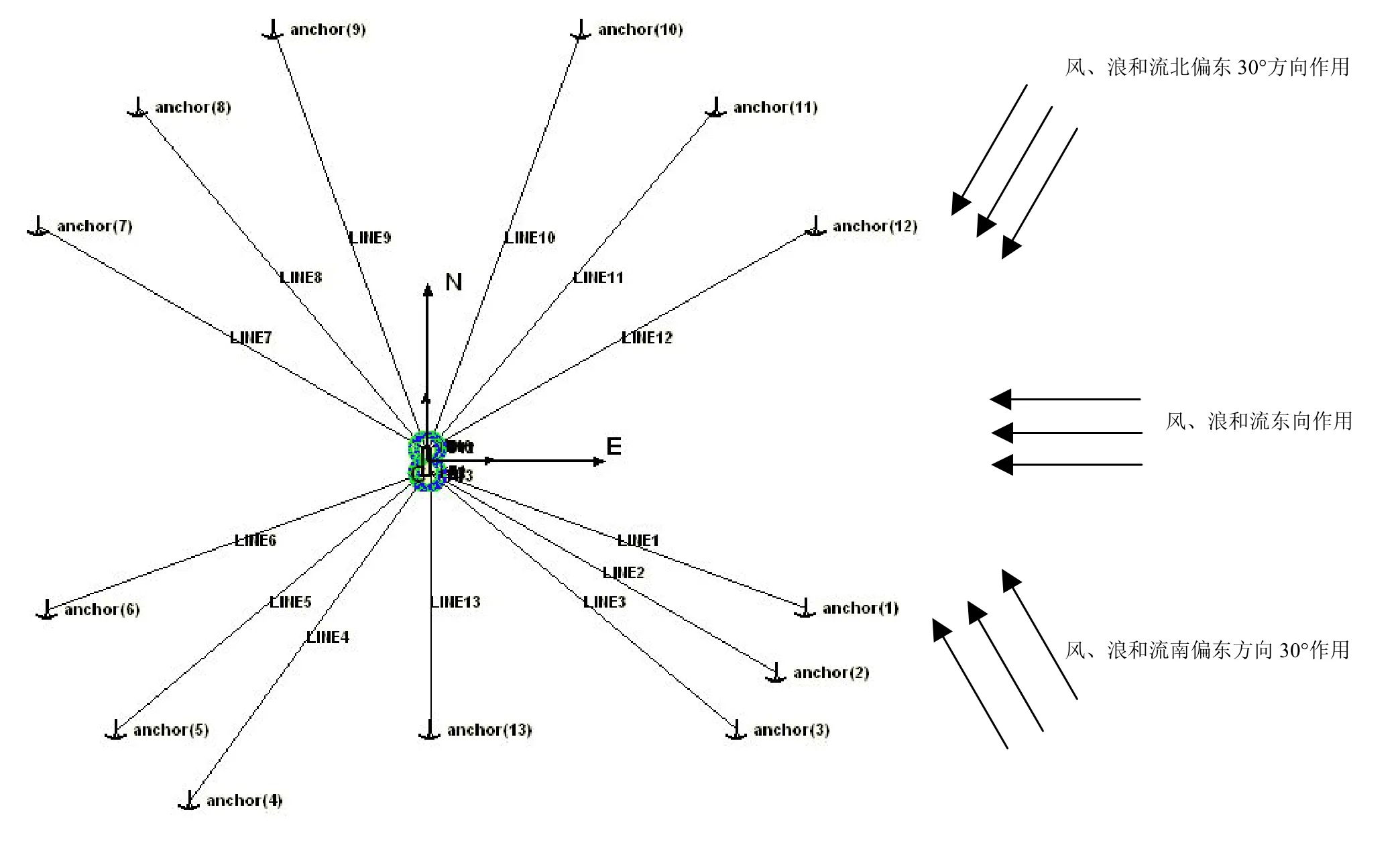
图5 3000t铺管起重船铺管作业时锚泊定位系统布置及风、浪和流的作用方向
3.7 锚泊定位系统设计张力的确定
按照API发表的文献[2]中有关锚泊线安全系数的描述:对于准静力方法,安全系数选为2.0,对于动力计算方法,安全系数可取为1.67,其他方法可在这两者间酌情选择。由于Ariane 7软件使用准动力方法,其安全系数按法国船级社发表的文献[3]选为1.75。该船铺管作业工况时,使用了准静力法对铺管作业过程中锚泊定位系统进行了离散处理,而每个离散的锚泊定位系统使用准动力数值计算方法,因此,安全系数仍选为1.75。
锚泊线安全系数的确定在锚泊系统设计中具有重要意义,因为由此可确定锚泊线的破断负荷及锚泊线铺出长度以及锚抛出的位置。本锚泊线中绞车缆绳的破断负荷为3800kN,而锚链的破断负荷为3887kN,所以选择3800kN作为本船锚泊线的最大破断负荷,相应锚泊线最大可承受的张力为3800/1.75=2171kN。
从定位锚机的绞车中间层拉力1100kN和有关锚上可承受最大抓力1176kN和锚泊线可承受最大轴向张力2171kN,取三者中最小者即1100kN为锚泊定位系统设计张力。
3.8 风、浪和流东向作用下的锚泊定位系统计算
假定初始位置与固定坐标系重合,铺管作业时移船的位置分别为初始位置(0m),相对初始位置分别为沿北向前进20m、40m、60m、80m、100m、120m、140m、160m、180m和200m,总计11个位置。作用在该船上的环境载荷中流向、浪向和风向均取在横向作用(由东向西)。不考虑移船速度的影响(本移船速度是0.25m/s),移船过程中锚的位置始终不变,只是锚泊线的长度发生变化。
3.8.1 初始位置处的锚泊系统计算结果
根据3.1节确定的锚泊定位系统配置参数、水深及海底形状、设计张力以及锚上不能承受垂向力等设计条件,通过悬链线法可计算出锚泊线由导缆孔到锚之间最小铺出长度。
在水深为300m时的锚泊线在水中的位形通过悬链线方程计算。此时锚上只承受水平方向的力,垂向刚好不受力,导缆孔处的轴向张力为设计张力1100kN,从导缆孔铺出的最小锚泊线长度为1810m。
实际设计中锚泊线的长度往往超过最小长度,希望铺在海底处有一段锚泊线(通常情况下是与锚相连接的锚链),可以提供一定的水平摩擦力[4],经过进一步的计算及考虑到锚泊线总长等因素最后确定锚泊线从导缆孔至锚处铺出长度为2500m以上。
1)导缆孔处的预张力和锚/导缆孔间位置计算结果,见表2。
2)锚泊定位系统时域分析计算结果,见表3、4。

表2 初始位置时导缆孔和锚处预张力及锚泊线铺出长度

表3 在固定坐标系中初始位置时受环境载荷作用下的最大、最小和平均位移
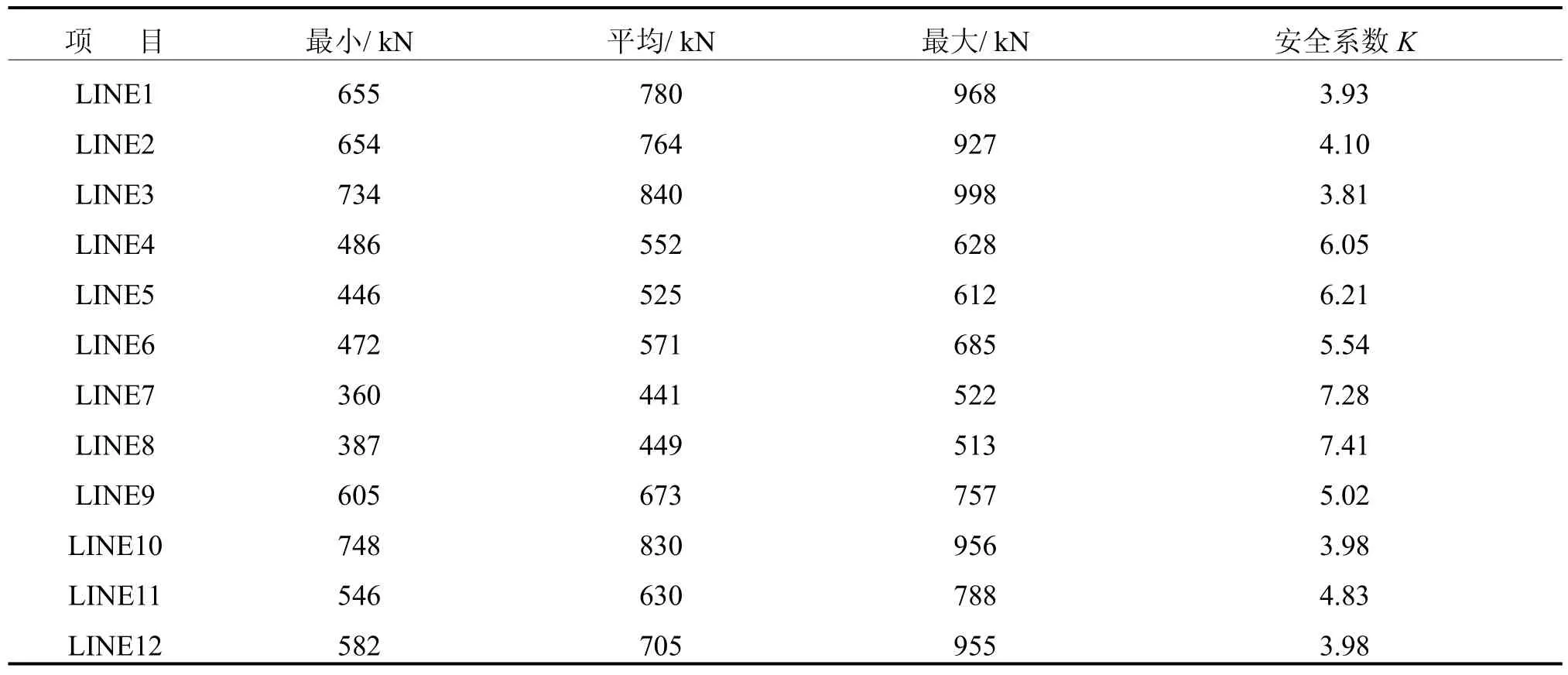
表4 初始位置时在环境载荷作用下锚泊线导缆孔处轴向最小、平均和最大张力
3.8.2 锚泊线长度随移船位置的变化
对12根锚泊线随移船位置的变化见表5,其中锚泊线12和7、锚泊线11和8、锚泊线10和9为对称锚泊线,其长度变化相同。
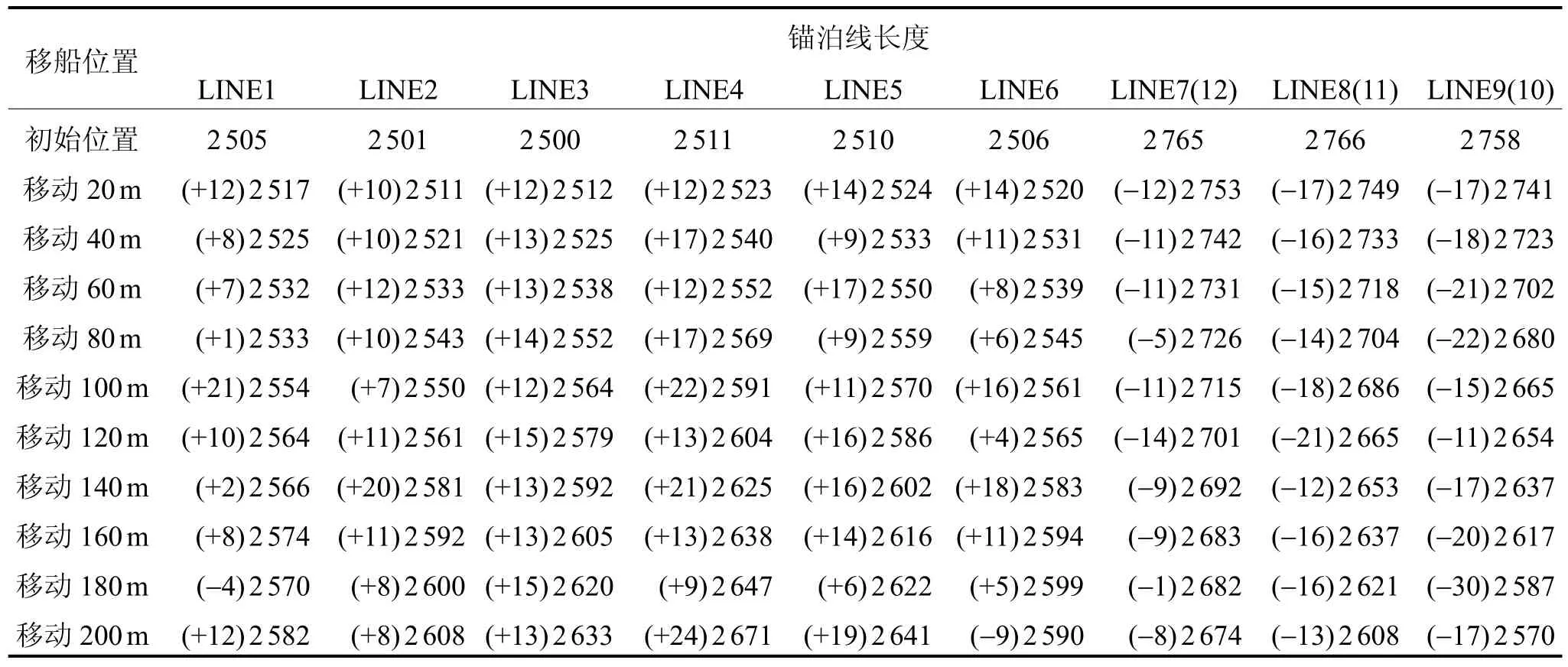
表5 风、浪和流东向作用时锚泊定位系统锚泊线长度随移船位置的变化
3.8.3 在移船过程中位移的变化
表6为风、浪和流东向作用时铺管起重船在移船过程中位移的变化,这仅是该船铺管作业时运动的极限位置,并不是真实的运动轨迹。
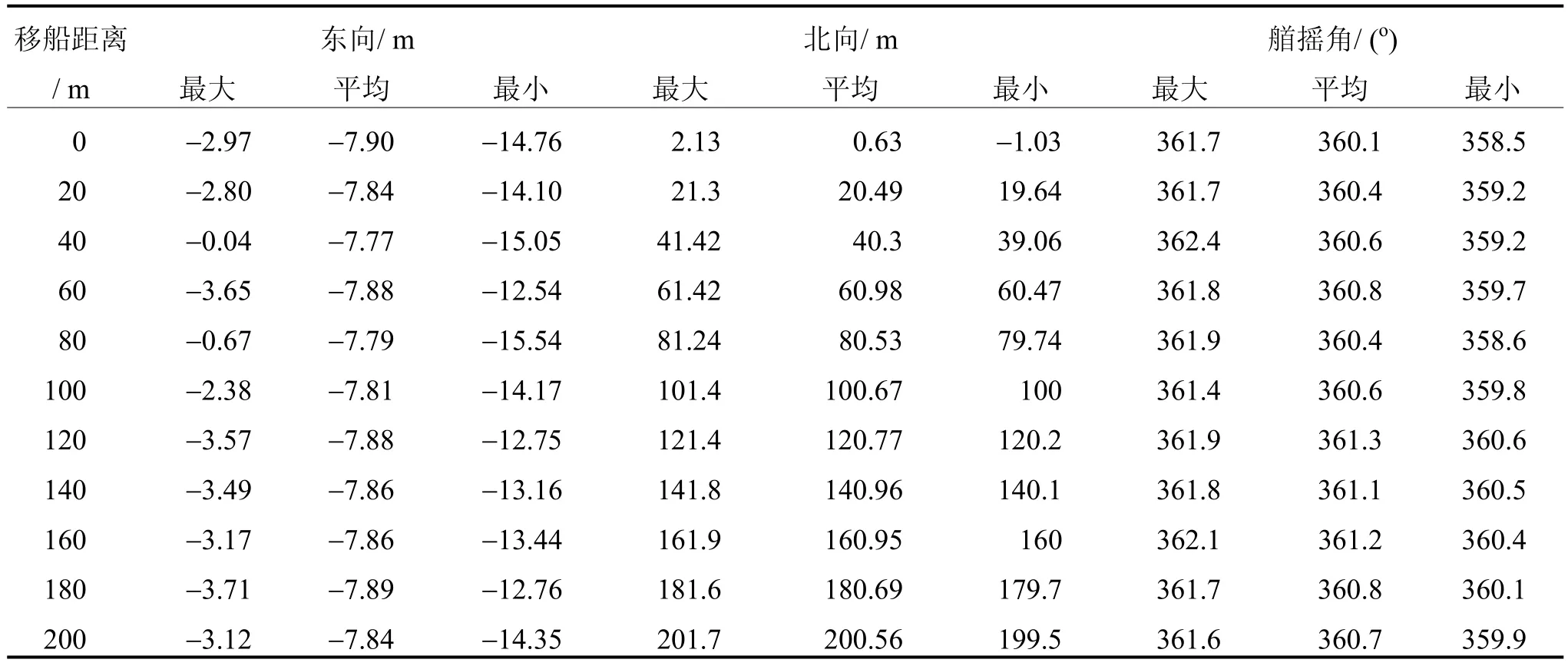
表6 风、浪和流东向作用时铺管起重船在移船过程中位移的变化
3.8.4 在移船过程中锚泊线轴向最大张力及铺管线水平张力
对铺管起重船铺管作业时移船过程中 12根锚泊线上轴向最大张力进行了统计,并列出铺管起重船铺管作业时铺管线导缆孔处水平方向的最小、平均和最大张力,见表7。

表7 移船过程中12根锚泊线上轴向最大张力及铺管线导缆孔处水平方向的最小、平均和最大张力
3.9 风、浪和流东向作用时锚泊定位系统计算结果分析
通过锚泊定位系统设计原则和铺设管线在锚泊定位系统中的应用,对设计的锚泊定位系统计算结果与其比照与分析,以确定所设计的锚泊定位系统是否满足要求。
1)由位移变化的表和图中显示出该铺管起重船在铺管作业时横向振荡运动的平衡位置始终处于-7.85m左右位置处,东向振荡运动的幅值在-15.54m和-0.04m之间;北向振荡运动的幅值为相应平衡位置处-1.03m和2.13m之间;艏摇运动的平衡位置始终处360.7°左右,艏摇振荡运动的幅值在358.5°和362.4°之间;
2)12条锚泊线(锚链和锚索)上的轴向最大张力不大于1100kN;
3)锚垂向不受力,水平方向受力应小于该锚的最大抓力1200kN;
4)铺管线上的水平张力为637kN,即65t,与本文3.5 节假定相符。
通过上述的分析总结,可知在风、浪和流向东向作用时的锚泊定位系统达到设计要求。
4 结 语
采用了非对称锚泊定位系统,使每根锚泊线能承受尽可能大的轴向张力,以限制船体的位移,从计算结果分析看,有些锚泊线上的轴向张力已接近或达到绞车所能承受最大移船时的张力 1100kN,这样可以保证船体的位移达到较小的程度。对于海上环境条件的确定,由于铺管船在铺管作业时确定可作业的环境条件,并没有将风、浪和流的联合作用方向给出统计,基于此,首先应针对横向来浪、风和流的作业来设计铺管作业时锚泊定位系统,然后根据API规范的要求对风、浪和流为南偏东30°方向和北偏东30°方向作用时的锚泊定位系统进行校核,可以得出,3.1节中所选取的锚泊定位系统的主要参数可以满足设计要求,因此可作为最终设计的锚泊定位系统。
[1]OCIMF. Prediction of Wind and Current Loads on VLCCs, Second Edition, Oil Companies International Marine Forum[C].London, 1994.
[2]Recommended Practice for Planning, Designing and Constructing Fixed Offshore Plat-forms - Load and Resistance Factor Design[R]. API Recommended Practice 2A-LRFD (RP 2A-LRFD), First Edition, July 1, 1993.
[3]BUREAU VERITAS. Quasi-dynamic analysis of mooring systems using Ariane software Guidance Note[R]. NI461 DTO R00 E, May 1998(Tentative issue).
[4]范 菊,黄祥鹿. 锚泊线的动力分析[J]. 中国造船, 1999,1 (1)∶ 13-20.
