高速磁悬浮电动机的混合磁轴承最小电流控制
2012-07-20任昌健房建成郑世强
任昌健,房建成,郑世强
(1.“惯性技术”重点实验室,北京 100191;2.“新型惯性仪表与导航系统技术”国防重点学科实验室,北京 100191;3.北京航空航天大学 仪器科学与光电工程学院,北京 100191)
由于磁轴承控制系统开环不稳定,为保证系统的稳定性,必须引入被悬浮物体的位移检测信号,构成闭环负反馈[1]。目前广泛应用于磁悬浮轴承控制系统的位移检测传感器是电涡流式位移传感器[2-3]。温度变化对该类型传感器影响较大,即使采取了相应的补偿措施,传感器输出信号随温度漂移的问题也难以完全消除。
最小电流控制是混合磁轴承控制策略中的一种[4]。其原理是利用混合磁轴承中永磁体产生磁力维持被控对象悬浮状态,系统在稳态情况下混合磁轴承中通入电流几乎为零,电磁力只在系统处于动态过程中时起到调节作用。因此,这种控制方式能够达到磁轴承控制电流几乎为零的效果。基于这种控制策略的磁轴承控制系统广泛应用于振动隔离平台以及磁悬浮试验机车上[5-9]。下文将在高速磁悬浮电动机磁轴承控制系统中采用最小电流控制策略,实现磁轴承控制系统所需控制电流最小,同时消除传感器温度漂移对磁轴承控制系统稳定性的影响。
针对最小电流控制问题,文献[9]利用具有负位移刚度的磁悬浮支承结合具有正位移刚度的弹簧设计了三自由度振动隔离平台。其中磁悬浮支承部分采用最小电流控制策略,使得负位移刚度可调。然而,该方案并没有实现完全无接触的支承方式。文献[10]针对磁轴承控制系统普遍存在的电压、电流和悬浮间隙等限制,采用受限控制理论设计了控制器,保证系统安全运行并使得控制电流和系统功耗较小。然而,由于系统设计时考虑边界条件较多,系统在多个方面都只能达到次优,不能实现控制电流最小化的最优控制效果。文献[11]在承重方向采用完全由永磁体构成的被动磁轴承实现较大承载力,省去了传统主动磁轴承的传感器、控制器、功率放大器和线圈等环节,减少了系统功耗,但是被动磁轴承刚度和阻尼不可控,调节系统刚度和阻尼不灵活,且相同承载力时被动磁轴承的体积比主动磁轴承大,不利于系统的优化。文献[12]采用角速率-转子位移前馈的控制方式,通过控制转子的悬浮位置,由永磁体来提供输出力矩,实现了低功耗控制。由此可以证明通过恰当的控制方式,尽量利用混合磁轴承中的永磁体来提供承载力是可行的。
最小电流控制可以通过两种方式实现:一是引入速度负反馈;二是引入电流小内环积分正反馈。本案采用第2种控制方式,结合控制系统和混合磁轴承自身特点,在分散PID控制的基础上提出了最小电流控制策略,实现了高速磁悬浮电动机转子的稳定悬浮,避免了电涡流位移传感器检测信号随温度漂移对控制系统稳定性的影响,并且系统控制电流可以达到最小。静态悬浮试验和升速试验验证了最小电流控制策略的有效性。
1 磁轴承控制系统建模
如图1所示,控制系统中的位移传感器检测出高速磁悬浮电动机转子偏离参考位置的位移,控制器根据位置偏差计算出控制信号,功率放大器将控制信号转换为磁轴承线圈中的电流,磁轴承产生相应的磁力,使电动机转子悬浮在给定位置上。

1—位移传感器;2—位移传感器调理电路;3—控制器;4—功率放大器;5—磁轴承线圈
该系统中的磁轴承是永磁电磁混合磁轴承,其产生的悬浮力包括永磁体产生的永磁力和磁轴承线圈通电后产生的电磁力。在转子每一个悬浮方向上有两个差动配置的混合磁轴承,如图2所示。磁轴承产生的磁力F与转子受到的其他力Fd平衡。转子稳定悬浮在两个差动配置的混合磁轴承之间。

图2 差动配置磁轴承原理图
磁轴承线圈中的电流、电动机转子的位移与磁轴承产生的磁力在平衡点附近可以用以下线性关系表示
F=kii+kxx,
(1)
式中:i为混合磁轴承线圈中的电流;x为转子偏离平衡位置的位移;ki和kx分别为混合磁轴承的电流刚度和位移刚度。
高速磁悬浮电动机坐标系定义如图3所示。悬浮的转子沿空间x,y,z轴存在6个自由度,分别是沿3个轴的平动和绕3个轴的转动。电动机转子绕z轴方向的转动是由电动机定子驱动的,不受磁轴承系统控制,因此不在本案讨论范围内。其余5个自由度的运动由磁轴承系统控制。
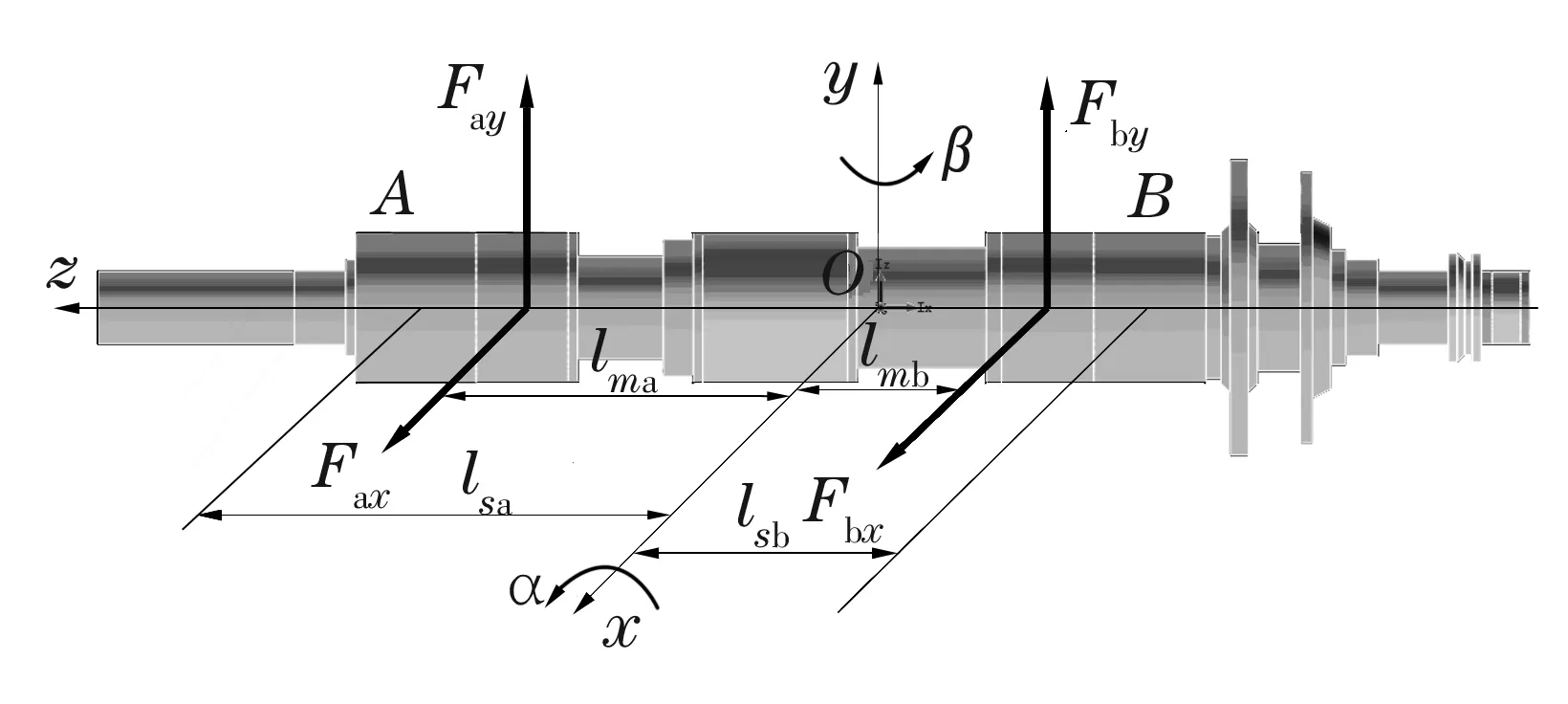
图3 转子坐标系定义图
电动机转子是细长轴,其极转动惯量与赤道转动惯量之比远小于1。因此,转子在旋转过程中的陀螺效应可以忽略,转子沿x,y轴的运动相互独立。文中电动机转子为刚性转子,转子的动力学方程可表示为
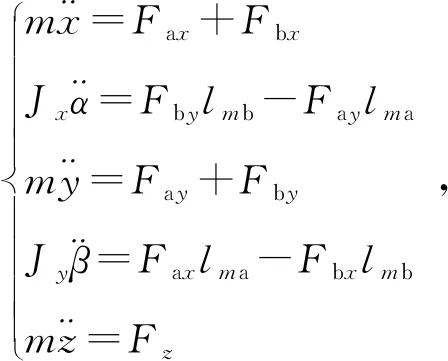
(2)
式中:m为电动机转子的质量;x,y,z分别为转子沿x,y,z轴方向的位移;Jx,Jy分别为转子沿x轴和y轴的转动惯量;α,β分别为转子沿x轴和y轴的转角;Fax,Fbx分别为转子轴伸端和非轴伸端在x轴方向受到的合力;Fay,Fby分别为转子轴伸端和非轴伸端在y轴方向受到的合力;Fz为转子在z轴方向受到的合力;lma和lmb分别为电动机轴伸端和非轴伸端磁轴承产生的悬浮力对转子质心O点的力臂。
根据磁轴承安装位置和转子质心的关系可以推出
(3)
式中:xax,xbx分别为电动机轴伸端和非轴伸端磁轴承在转子上对应位置中心点沿x轴方向的位移;yay,yby分别为电动机轴伸端和非轴伸端磁轴承在转子上对应位置中心点沿y轴方向的位移。将(3)式代入(2)式整理得
(4)
根据表1所列高速磁悬浮电动机参数可得
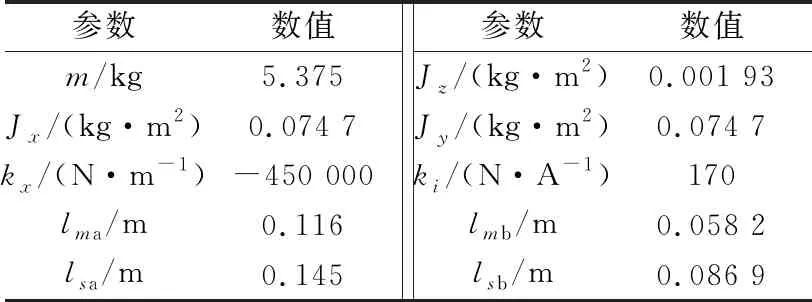
表1 高速磁悬浮电动机参数
(5)
所以电动机转子各个通道之间的运动互相解耦,可以得到转子在磁轴承控制的5个通道中的运动方程为
(6)
2 分散PID控制策略
电动机转子各自由度运动相互独立,可以在磁轴承5个控制通道分别加入PID控制策略,使转子悬浮在给定参考位置上。以ax通道为例控制框图如图4所示。
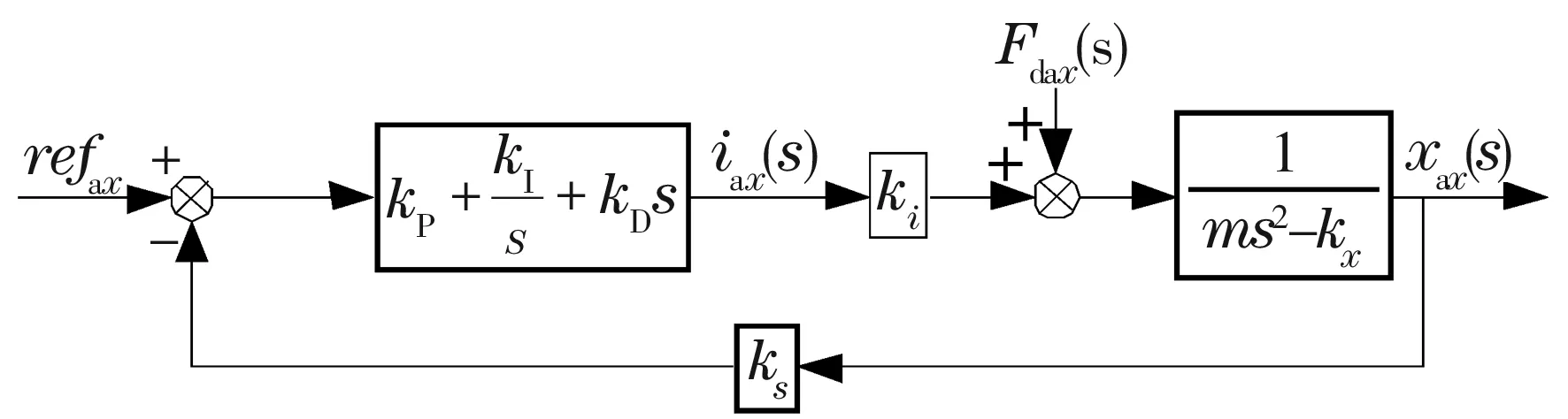
图4 分散PID控制策略系统框图
位移环中PID控制器中的积分环节抵消了转子悬浮位置稳态误差,转子可以无静差地稳定悬浮在给定参考位置refax上。一般为了使转子与定子之间的间隙尽量大,通常选择将转子悬浮在保护间隙的几何中心上。这时差动配置的两个磁轴承中永磁体对转子的吸力相互抵消,需分别给两个差动配置的磁轴承通电产生电磁力,以平衡转子受到的重力和其他干扰力。
在高速磁悬浮电动机磁轴承控制系统中转子悬浮参考位置是由控制器给定的。因此,给定悬浮参考位置不会随传感器信号温度漂移而发生变化。如图5所示,传感器测量信号未发生漂移时,转子悬浮在参考位置O点处。传感器测量信号漂移后,转子悬浮位置仍在O点处。此时,差动配置的两个混合磁轴承中永磁体对转子的吸力相差很大。因此,需要给磁轴承线圈通很大的电流以平衡这部分永磁力,漂移越明显,需通的电流越大。这种情况下,磁轴承控制系统的稳定性也相应变差。极端情况下,转子将碰到轴承,造成电动机失稳。针对高速磁悬浮电动机保护边界和保护间隙中心随传感器测量信号漂移的问题,提出了最小电流控制策略。

图5 分散PID控制转子悬浮位置示意图
3 最小电流控制策略及稳定性
最小电流控制策略的原理是利用混合磁轴承中的永磁力来平衡电动机转子受到的重力和其他干扰力,保持转子悬浮在差动配置的两个混合磁轴承中间的某一位置,而不是悬浮在控制器给定的参考位置上。轴承中的永磁体提供了绝大部分平衡力,此时磁轴承线圈中几乎不需要通电流就可以实现转子的稳定悬浮,因此达到了控制电流最小的效果。如图6所示,转子悬浮位置始终在保护间隙几何中心G点附近,与保护边界维持了足够的安全距离。

图6 最小电流控制转子悬浮位置示意图
最小电流控制策略是在分散PID控制基础上提出的。最小电流控制策略的系统框图如图7所示。其中,图中加粗的环节是最小电流控制的关键。
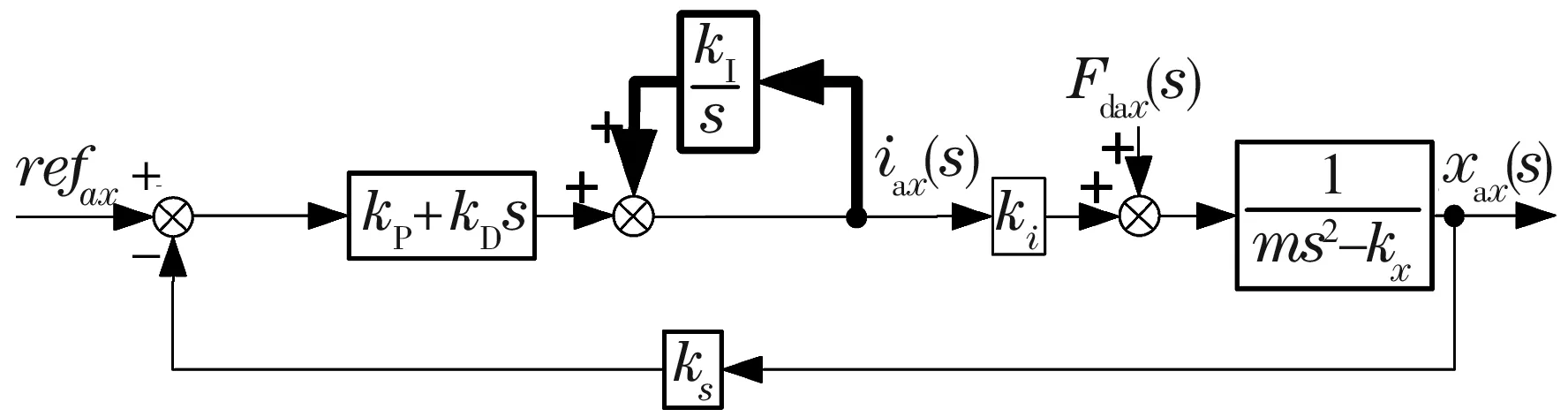
图7 最小电流控制策略系统框图
磁轴承控制系统由电流内环和位移外环两个闭环组成,位移外环中去掉了积分环节,因此转子的悬浮位置与给定参考位置会有一定偏差。同时,加入了电流内环积分正反馈环节,会不停地对磁轴承线圈中电流进行积分。只有当线圈中电流为零时,积分环节的输出才会达到固定值,系统也达到稳定状态。否则,积分环节的输出会一直变化,系统一直处于动态过程,无法达到稳态。
由干扰力Fdax(s)到磁轴承线圈电流iax(s)传递函数为
(7)
式中:ks为位移传感器输入输出传递函数的比例系数;kP,kI,kD分别为最小电流控制中比例环节、积分环节、微分环节的系数。
根据终值定理
(8)
设干扰力Fdax(t)为阶跃式干扰,则Fdax(s)=1/s。联立(5)和(6) 式,代入Fdax(s),整理可得
(9)
因此,最小电流控制策略实现了磁轴承线圈中电流为零的控制效果。在系统达到稳态的情况下,位移外环输出控制量与电流内环积分正反馈环节的输出量平衡,线圈中的电流近似为零。此时,转子受到的重力和其他干扰力主要由混合磁轴承中的永磁体产生的永磁力来提供平衡力。
根据最小电流控制策略的原理搭建混合磁轴承最小电流控制系统仿真模型,如图8所示。

图8 混合磁轴承最小电流控制系统仿真模型
为考察加入的电流积分正反馈环节对闭环系统稳定性的影响,将电流内环积分正反馈系数ki设定为变化的参数,绘出闭环系统的根轨迹。如图9所示,ki从负无穷变化至正无穷时闭环系统特征根在s平面上有两次穿越虚轴的过程,分别对应ki=0和ki=4 265。因此,当ki取值范围为0~4 265时,闭环系统是稳定的。

图9 闭环系统根轨迹
4 试验结果
在高速磁悬浮电动机磁轴承控制系统试验平台上,利用分散PID控制和最小电流控制两种策略分别进行高速磁悬浮电动机静态悬浮试验和升速试验。
控制系统包括磁轴承控制器和电动机控制器。磁轴承控制器实现高速磁悬浮电动机转子的稳定悬浮。电动机控制器驱动电动机转子旋转。
4.1 静态悬浮试验
当高速磁悬浮电动机处于静止状态,传感器检测信号未发生温度漂移时,电动机转子在保护边界上大范围移动时对应位移传感器5通道输出信号范围均为-5 V~+5 V。
首先采用分散PID控制策略将高速磁悬浮电动机转子悬浮起来,并保持转子的静态悬浮状态。在t=0.5 s时将磁轴承控制策略由分散PID控制切换到最小电流控制。记录电动机转子5通道位移波形和磁轴承线圈5通道电流波形,如图10和图11所示。
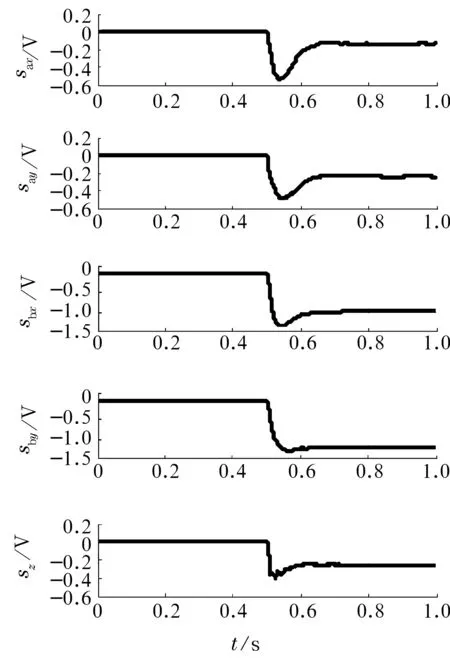
图10 静态悬浮5通道位移波形

图11 静态悬浮5通道电流波形
从图10可以看出,转子5通道位移在t=0.5 s时均发生变化,这是由于切换控制策略后最小电流控制在自动寻找完全由永磁体提供平衡力的平衡点。转子5通道位移信号均在-1.5 V~0 V以内,远小于高速磁悬浮电动机保护边界-5 V~+5 V,保证了转子的稳定悬浮。
从图11可以看出,磁轴承线圈5通道电流在t=0.5 s切换控制策略后经过短暂的过渡过程都几乎变为0,实现了最小电流控制。
4.2 升速试验
分别采用分散PID控制策略和最小电流控制策略将电动机转速从0升至36 000 r/min,测量电动机转子5通道位移和磁轴承线圈5通道电流信号变化的波形,如图12和图13所示。其中,实线是采用分散PID控制策略时的波形,虚线是采用最小电流控制策略时的波形。

图12 升速过程中转子5通道位移变化
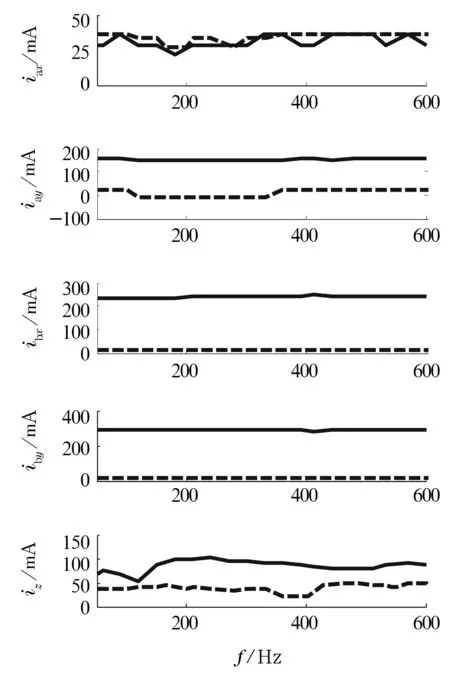
图13 升速过程中5通道电流变化
图12显示高速磁悬浮电动机转速从0升至36 000 r/min的过程中,采用分散PID控制策略时,电动机转子始终悬浮在控制器给定的参考位置附近,偏差很小。然而,采用最小电流控制策略时,转子没有悬浮在控制器给定的参考位置上。因受温度变化影响,控制器给出的参考位置已不再是电动机保护间隙实际的几何中心。在零电流控制策略下,自动寻找悬浮电流最小的位置保持电动机转子悬浮。此时,转子的悬浮位置不再受传感器温度漂移导致控制器给定参考位置偏离实际几何中心位置的影响。由此,避免了传感器信号漂移导致转子悬浮位置偏离保护间隙几何中心,引起系统悬浮电流过大,系统稳定性的降低的问题。
从图13中可以看出,采用分散PID控制策略时,磁轴承5通道线圈电流值明显较大,磁轴承线圈中需要通较大电流来保证电动机转子的悬浮。采用最小电流控制策略时,磁轴承5通道线圈电流均在50 mA以内,磁轴承线圈中通入的电流很小。高速磁悬浮电动机主要依靠混合磁轴承中永磁体提供永磁力来保持转子悬浮。
从图12和图13中还可以看出,在升速过程中,随着电动机温度的缓慢升高,分散PID控制策略下电动机转子始终悬浮在控制器给定的参考位置上,而磁轴承5通道线圈电流缓慢变大。
在最小电流控制策略下,转子悬浮位置始终在自动调整,在传感器信号随温度发生漂移的情况下,保持转子悬浮在保护间隙实际中心附近,避免了传感器温度漂移对系统的影响。同时,磁轴承5通道线圈电流始终保持在50 mA以内,磁轴承线圈中通入的电流很小,转子悬浮主要依靠永磁体的永磁力。
5 结束语
为克服传感器温度漂移对磁轴承控制系统稳定性影响,采用最小电流控制策略,依靠混合磁轴承中永磁体提供永磁力实现高速磁悬浮电动机转子稳定悬浮。试验结果表明,在传感器信号存在温度漂移的情况下,采用最小电流控制策略,高速磁悬浮电动机能够在全转速范围内稳定可靠运行,磁轴承控制系统能够保证电动机转子的稳定悬浮,同时,控制电流达到最小。
