密闭舱室突发污染浓度动态预测与源项辨识
2012-07-19庞丽萍曲洪权
庞丽萍 曲洪权 胡 涛 王 浚
1北京航空航天大学航空科学与工程学院,北京100191 2北方工业大学信息工程学院,北京100144
密闭舱室突发污染浓度动态预测与源项辨识
庞丽萍1曲洪权2胡 涛1王 浚1
1北京航空航天大学航空科学与工程学院,北京100191 2北方工业大学信息工程学院,北京100144
潜艇、载人航天器等密闭微环境随着人员停留时间的延长,其舱室空气污染问题已成为危害工作人员生命安全的主要因素,因此迫切需要开展快速准确的污染浓度预测以及对突发不确定污染源辨识的技术研究,并提高密闭环境主动应对突发污染的能力。对舱室污染浓度进行动态预测和污染源项强度辨识是实现舱室空气质量实时预测的关键。建立了集总污染源概念,提出了联合使用卡尔曼滤波和最小二乘算法的舱室突发污染辨识与浓度预测方法,并与建立的变结构污染浓度模型相结合,同时完成了集总污染源散发强度的动态辨识和污染浓度状态预测。另外,在突发污染源定位方面开展了前期的探讨研究工作,建立了一种新的多维浓度离散随机模型,并提出了基于多假设特征匹配的突发污染源定位方法研究。通过匹配观测数据序列与单参数(源位置)多假设获得的传感器处浓度响应序列特征来实现源项定位及散发时间估计,可初步确定源散发强度。
舱室环境;污染源辨识;浓度预测;卡尔曼滤波
0 引 言
尽管潜艇和载人航天器等密闭微环境在最初设计时就已精心选择了内装饰材料,并系统地配置了微量污染净化设备,这样虽然可以在一定程度上降低舱室微量污染危害,但由于处于特定的使用环境、密闭舱室空气需要再生循环使用、污染源复杂、工作人员生活和工作污染事故突发概率高等多个因素,因而仍不可避免地会引起舱室空气污染问题。随着时间的延长,舱室突发污染问题日益受到人们的重视,因此迫切需要开展突发不确定污染源特性辨识方法研究,实现快速污染定位及危害预测,以提高该类密闭微环境主动应对突发污染的能力,从而保障工作人员的生命安全[1-2]。
本文开展了基于集总污染源的突发污染浓度预测,以及基于多假设特征匹配的突发污染源定位方法研究,试图为增强该类密闭环境的主动污染控制提供技术支持。
1 基于集总污染源的浓度预测
1.1 基于集总污染源的浓度预测方法
舱室被监测污染物浓度变化集总模型的差分方程为:

式中,C为舱室污染物浓度,mg/m3;V为密闭舱室的有效空气体积,m3;t为时间,s;Q为舱室通风率,m3/s;x为新风系数(新风量与总风量之比);Cin为新风污染浓度,mg/m3;G为集总污染源产生率,mg/s;k为离散时刻。
利用在线监测的污染浓度实时数据,结合滤波算法跟踪污染源散发强度,与辨识算法相结合获得集总污染源散发强度G(t)随时间的变化规律,然后再与浓度滤波算法及式(1)相结合,可以实现动态的舱室浓度和新风入口浓度的滤波与预测值,从而为空气质量预测和污染态势分析提供快速判断的依据。
本文提出了联合使用卡尔曼滤波和最小二乘算法的舱室突发污染源辨识与浓度预测方法,如图1所示。当污染源项的散发强度高于设定的产生率阈值时,将启动辨识算法。其实现方法如下:
1)使用基于源项噪声特性的污染浓度模型和污染滤波算法,可产生源项强度滤波跟踪值,并累计该值。
2)通过“辨识时间段优化”程序来确定最优辨识时间段,此时辨识的起始和终止时间点很重要,尤其是在处理多项式型污染源特性时。
3)将指定优化段的时间和源项滤波跟踪值传递给污染源强度辨识算法,该算法是使用最小二乘算法来获得散发特性方程,从而可得到污染源的强度变化规律[3]。
4)上传污染源辨识结果,将浓度模型切换到基于源项辨识特性的污染浓度模型。
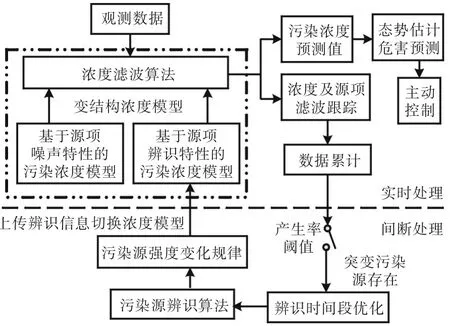
图1 舱室突发污染源辨识与浓度预测实现框图Fig.1 Identification and concentration prediction realization diagram
这里需要建立变结构浓度模型,以实现上述方法。考虑噪声后的密闭舱室污染统计模型为[4]:

变结构是指污染源项强度G模型会根据污染源项强度辨识结果而改变。
模型结构1(基于噪声特性):

模型结构2(基于辨识特性,仅以多项式型污染源特性为例):

式(2)~式(4)中,nC(k)为浓度C在k时刻的观测噪声;nG(k)为产生率G在k时刻的噪声。上述噪声假设为高斯分布。
1.2 舱室突发污染浓度预测试验
图2所示为密闭试验舱。试验时,将污染源布置在舱内任意位置,传感器布置在出风口附近的固定位置。使用质量流量控制器控制气瓶污染气体的排出量来模拟污染源,可以向舱内释放一定量的污染物,控制污染释放量。通过出风口附近的传感器获得污染浓度测量的实时数据。
图3所示为传感器实时监测CO2浓度数据及跟踪与预测的舱室浓度变化曲线。分析图3可知,本文提出的污染浓度预测算法能较好地实现预期的污染浓度,并与试验结果的吻合性好。
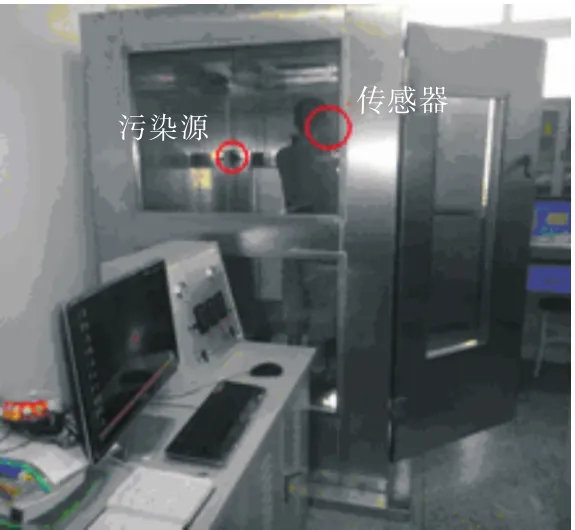
图2 试验照片Fig.2 Test equipment
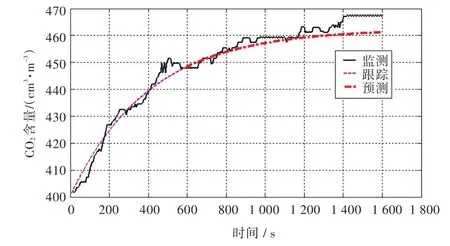
图3 跟踪、预测浓度与试验数据的比较Fig.3 Comparison of tracking and predicted concentration with experimental data
2 突发污染源定位方法
基于上述污染浓度预测,本文进一步发展了一种基于多假设特征匹配的突发污染源定位方法,用以感知突发污染源定位。
2.1 突发污染源定位原理
污染浓度多维传播可满足下式:

式中:dg为气体分子扩散系数,mg/(m·s);u为风速,m/s;fs为污染源的位置和散发强度函数,mg/(m3·s);t为时间,s;ρ为气体密度,mg/m3。
可以得到污染传播模型的离散形式:
式中,Δt为时间步长;m为时间节点;j(j=1,…,N)为空间节点数;N为节点总数。如果在节点 j位置没有污染源,则=0,有污染源则≠0。
在已知速度u和扩散系数d等参数的情况下,正向计算浓度序列时,需要知道污染源的位置p,强度 fs和散发起始时刻te这3个参数。反向定位则无法预知这3个参数。采用正向多参数多假设定位方法,需要对p,fs,te进行多假设,计算量非常大[5]。另外,如果使用逆CFD模型,由于受观测噪声的影响,其观测数据具有不确定特性,因此,很难将具有噪声的观测数据直接用于目前常规的确定性多维CFD逆模型,以进行源项位置辨识[6-8]。本文提出了一种基于多假设特征匹配的突发污染源定位方法,试图探讨该问题[9]。实现方法如下:
1)污染源位置p的多假设
由于传感器与污染源的相对距离未知,因此,能够被利用的定位信息只有传感器处带有噪声的观测浓度序列Csensor和污染感知时刻tp。为实现污染源定位,假设污染源依次出现在每个可能的位置 pi上,即先进行源位置 pi单参数已知的假设,从感知污染时刻tp起,在时间层j上针对该位置 pi逆向搜索出最优污染散发起始时刻。
2)单位虚拟源观测浓度假设序列
假设污染源依次出现在假设节点位置 pi处,分别在每个节点处设置单位虚拟污染源s。针对假设 pi和s,从感知时刻tp逆推假设污染源散发起始时刻,以计算 pi,s和这 3 个参数下的传感器处假设浓度观测序列。由于是传感器处的假设浓度观测数据,而真实污染源强度并不是单位污染源,所以假设观测数据与传感器观测数据Csensor具有高度差别,需要进行污染源强度预估计,以获得初步未知污染源强度。
3)污染源强度的预估计
污染源的散发强度呈正例变化时,能够引起的各点浓度曲线也呈相应倍数的正例变化,所以,初步污染源估计强度为:
4)估计污染源作用下的观测浓度假设序列
对污染源位置 pi进行假设后,可得到不同散发时刻对应的不同未知污染源估计强度,由式(6)可计算出传感器节点处的相应计算浓度,即传感器假设观测浓度序列。
5)假设浓度与观测浓度特征的距离
在时间段[t1, t2]内,定义不同传感器假设浓度曲线与传感器真实观测浓度曲线的特征距离:

最小特征距离是指假设污染源 pi应对的不同污染源散发时刻所对应中的最小值:

7)污染源定位概率

式中,N为所有污染源可能出现的节点总数。
2.2 突发污染源定位试验研究
为了验证上述污染源定位方法的可行性,开展了相应的突发污染试验研究。试验装置如图4所示,污染源可能出现在任意一点,污染源模拟采用与第2.2小节相同的装置,传感器仅布置在回风口的固定位置处。传感器为英国海德公司的实时质谱分析仪。本试验仅进行了定污染释放速率的污染源定位研究工作。
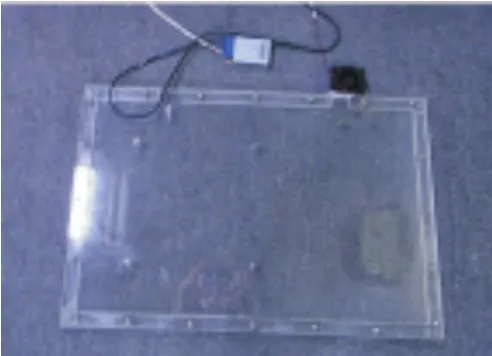
图4 污染源定位试验装置Fig.4 Experimental device of source location
图5所示为风速场(X,Y分别为图4所示实验区域的长度和宽度),图6所示为传感器监测到的污染物浓度曲线。采用本文提出的突发污染定位方法给出的定位概率如图7所示,突发污染源出现在定位概率最大的点处,即入口处,与设置较吻合。

图5 风速场Fig.5 Velocity flow chart
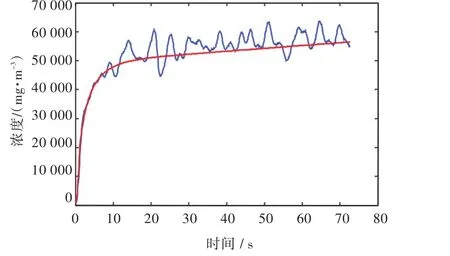
图6 出口处的浓度观测曲线Fig.6 Observed concentration curve at the outlet
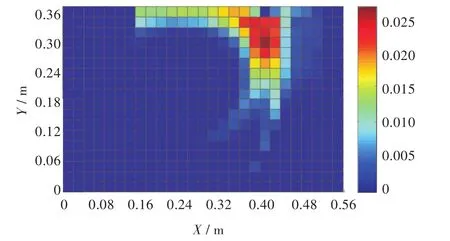
图7 突发污染源定位概率图Fig.7 Positioning probability map for locating sudden source
通过匹配观测数据序列与多假设获得的传感器处浓度响应序列特征,可以实现源项定位和散发历史重构,同时,构建了污染源位置分布概率,以表示定位结果,从而使得结果更符合实际情况。
3 结 语
本文针对潜艇等密闭舱室突发污染的情况,提出了联合使用卡尔曼滤波和最小二乘算法的舱室突发污染辨识与浓度预测方法,同时完成了集总污染源散发强度动态辨识和污染浓度状态预测。另外,还提出了基于多假设特征匹配的突发污染源定位方法研究,通过匹配观测数据序列与单参数(源位置)多假设获得的传感器处浓度响应序列特征,试图实现突发污染源项的定位。对此,开展了相应的试验研究工作,以推动该项工作的进一步深入开展。
[1]HOCKING M B.Passenger aircraft cabin air quality:trends,effects,societal costs,proposals[J].Chemo⁃sphere,2000,41(4):603-615.
[2]ALAPATI S,KABALA Z J.Recovering the release his⁃tory of a groundwater contaminant using a non-linear least-squares method[J].Hydrol.Process,2000,14(6):1003-1016.
[3]GORDON N J, SALMOND D J.Novel approach to nonlinear/non-Gaussian Bayesian state estimation[J].IEEE Proceedings,1993,140(2):107-113.
[4]PANG L P,CHANG H J,QU H Q.Dynamic source identification of emitting characters in enclosed envi⁃ronments[J].Journal of Beijing University of Aeronau⁃tics and Astronautics,2010,36(1):31-34.
[5]ZHAO B,LI X T,CHEN X,et al.Determining ventila⁃tion strategy to defend indoor environment against con⁃tamination by integrated accessibility of contaminant source(IACS)[J].Building and Environment,2004,39(9):1035-1042.
[6]ZHANG T,CHEN Q.Identification of contaminant sources in enclosed environments by inverse CFD mod⁃eling[J].Indoor Air,2007,17(3):167-177.
[7]LIU X,ZHAI Z Q.Probability-based inverse modeling algorithm for indoor pollutant source tracking[C]//Building Simulation,2007:810-817.
[8]ALEEXANDER Y S,Painter S L.A robust approach for iterative contaminant source location and release history recovery[J].Journal of Contaminant Hydrolo⁃gy,2006,88(3):181-196.
[9]PANG L P,CHANG H J,QU H Q.Source identifica⁃tion of emitting characters in aircraft cabin[J].Journal of Astronautics,2010,31(1):282-286.
[10]范玉妹,汪飞星,王萍.概率论与数理统计[M].北京:机械工业出版社,2007:192-195.
Prediction and Identification of Sudden Pollution Source
PANG Li-ping1QU Hong-quan2HU Tao1WANG Jun1
1 School of Aeronautic Science and Engineering,Beihang University,Beijing 100191,China 2 College of Information Engineering,North China University of Technology,Beijing 100144,China
Such as submarines,manned spacecraft and other closed micro-environment,cabin air pollu⁃tion has become a hazard to the safety of staff with the residence time extend.There is an urgent need for fast and accurate prediction of pollution concentration and location identification of a sudden source to im⁃prove the closed environment active control ability for unexpected pollution.Dynamic cabin concentration prediction and pollution sources identified are a key to achieve real-time air quality forecast.A concept of lumped source and a variable structure concentration model were built to realize concentration prediction together using Kalman filtering and least-squares algorithm.In addition,a source location method was studied because it is a key link for source identification.The contaminant source location method based on multi-hypothesis source position was established and attempt to solve the source location problems.This method realizes source identification by comparing the similarity between the sensor-measured concentra⁃tion distribution and the multiple hypothetical concentration distributions calculated at the monitoring point based on multi-hypothesis source position.The proposed method is capable of identifying a source po⁃sition,estimating its initial emission time and approximate strength.
cabin environment;pollution source identification;concentration prediction;Kalman filtering
U664.9
A
1673-3185(2012)03-64-04
10.3969/j.issn.1673-3185.2012.03.012
2012-01-05
国家自然科学基金资助项目(50808007)
庞丽萍(1973-),女,博士,副教授。研究方向:有限空间环境控制。E⁃mail:pangliping@buaa.edu.cn
曲洪权(1973-),男,博士,副教授。研究方向:信号处理。E⁃mail:qhqphd@163.com
王 浚(1935-),男,中国工程院院士。研究方向:人机与环境工程。
庞丽萍。
[责任编辑:饶亦楠]
