基于LabviewPXI的EPS硬件在环试验平台开发
2012-07-18赵林峰
赵林峰, 夏 光,2, 黄 鹤, 高 明
(1.合肥工业大学 机械与汽车工程学院,安徽 合肥 230009;2.合肥工业大学 汽车工程技术研究院,安徽 合肥 230009;3.株洲易力达机电有限公司,湖南 株洲 412002)
基于LabviewPXI的EPS硬件在环试验平台开发
赵林峰1, 夏 光1,2, 黄 鹤1, 高 明3
(1.合肥工业大学 机械与汽车工程学院,安徽 合肥 230009;2.合肥工业大学 汽车工程技术研究院,安徽 合肥 230009;3.株洲易力达机电有限公司,湖南 株洲 412002)
文章以非线性轮胎模型和7自由度整车动力学模型为基础,在Labview平台建立转向阻力矩动力学模型,转角信号作为输入,使用LabVIEW RT(实时)模块,将这些模型程序下载到实时目标硬件PXI上运行,结合硬件接口电路控制电液比例控制器,继而驱动液压加载装置来模拟转向阻力矩。试验结果表明,设计的硬件在环试验台可用于EPS基本特性的测试、试验和EPS控制器的开发、参数调整。
电动助力转向;试验台;转向阻力矩;硬件在环
0 引 言
为了实现电动助力转向系统(EPS)的2个主要功能,即转向操纵轻便性或不同的驾驶路感、良好的回正性能,开发过程中须进行大量的实车试验,需要很长的开发周期,且消耗大量的人力和物力。因此,能够有效缩短开发周期、节约开发成本的EPS系统开发和相关部件测试的方法和试验平台,一直是国内外高校和科研机构的研究热点[1-2]。
文献[3-4]采用线性类弹簧结构模拟转向阻力矩;文献[5]通过加载装置中的千斤顶调节前轮负荷,以获得不同的转向阻力矩;文献[6]根据不同的试验,可以选择人工手动加载或伺服电机加载模拟转向阻力矩;文献[7]设计开发了一套基于双伺服电机加载的电动助力转向器硬件在环仿真试验平台。
文献[3]采用线性类弹簧结构、文献[8]采用基于ARM7控制的液压加载装置模拟转向阻力矩,但不能随车速以及路面状况调整转向阻力矩。
本文设计了基于Labview PXI的EPS试验台,以转向盘转角信号作为输入,结合硬件接口电路控制电液比例控制器,继而驱动液压加载装置输出压力模拟转向阻力矩。试验表明,所设计的试验台可以模拟出不同路面条件及车速下的转向阻力矩,便于进行EPS控制器设计和调试。
1 转向试验台模型
基于Labview PXI的转向实验台,主要由宿主机、目标机和控制对象等组成。宿主机是普通计算机,在其上安装有Labview软件及相应的实时模块、各种外部设备的驱动程序,运行车辆动力学模型,随着转向盘转角和路面条件的变化输出转向阻力矩。目标机是一台美国NI公司的PXI-1042Q控制器,该控制器提供了一个实时操作系统,用以实现控制程序的执行。接口系统起到了承上启下的作用,一方面将通过转向试验台传感器获得的信号输入到控制器,另一方面将控制器输出的控制信号发送到试验台。在试验过程中,上位机与下位机间通过TCP/IP协议构成了网络架构下的连接。上位机编好的应用程序,下载到下位机的实时操作系统中进行编译、运行,下位机部分结果在上位机进行显示。EPS硬件在环试验台架构的原理如图1所示。

图1 EPS硬件在环试验台架的架构
由于汽车行驶的工况、路况十分复杂,转向过程中转向系统要克服回正力矩和摩擦阻力矩以实现转向,回正过程中回正力矩是转向车轮自动返回到直线行驶位置的主要恢复力矩。在不同附着系数路面上,同样的操作过程中,转向阻力矩或回正力矩却又有很大差异。为了将转向阻力矩与车辆运行环境联系在一起,须建立转向系统转向阻力矩模型,简化的作用在转向小齿轮的转向力矩Tr模型如下:

其中,N2为转向轴到前轮的传动比;Mz为前轮自回正力矩;Msz为重力引起的回正力矩;Tf-rp为转向系摩擦力矩。
轮胎的自回正力矩Mz由轮胎侧向力和轮胎拖距产生,这里需引入整车动力学模型计算轮胎的自回正力矩。
不考虑车辆侧倾因素的影响,仿真采用7自由度车辆模型简图及动力学方程、轮胎与路面之间的接触力在车身航向直角坐标上的分解图[9]。采用的非线性轮胎模型为Dugoff轮胎模型,设左右轮胎侧偏刚度相同,4个轮胎纵向刚度相同,不考虑其滞后特性,其表达式为:
其中,λ为轮胎的纵向滑移率;Fxw、Fyw分别为轮胎纵向力、侧向力;τ为车速附着系数影响系数;Cαi、Cs分别为轮胎的侧偏刚度、纵向刚度;μ为路面附着系数;ζ为轮胎动态参数;ψ(ζ)为有关ζ的函数;i=1,2,3,4,分别表示左前轮、右前轮、左后轮、右后轮。
假设同轴左、右车轮的转向角相同,前轮转向,即
其中,δ为轮胎转角;Fxw、Fyw分别为轮胎纵向力、侧向力;i=1,2,3,4。
轮胎拖距为主销后倾引起机械拖距及气胎拖距之和。机械拖距tm视为一定值,而气胎拖距tp不同,它受轮胎侧偏刚度、路面附着系数及侧偏角等因素影响,其初值为tp0,表达式如下:
其中,α为轮胎侧偏角。
在上述模型中,描述的是轮胎侧向力Fy和轮胎自回正力矩Mz随侧偏角变化的特性,随着轮胎侧偏角的增大,轮胎自回正力矩比侧向力更早地达到饱和状态,且达到峰值后,轮胎自回正力矩会急剧降低。
一般称自回正力矩到达峰值之前的区域为线性区域,而随着路面附着系数的降低,轮胎自回正力矩线性区域和幅值会明显降低。
重力引起的回正力矩Msz可描述[9]为:

其中,Dn、φ为主销内倾量、主销内倾角。
原地转向时松开转向盘后,转向盘会小幅度回正,但并不能置中,这是由于转向系统的内部摩擦力矩Tf-rp所致,一般可认为Tf-rp为常数。
2 试验平台搭建
采用线性类弹簧结构模拟转向阻力矩,在常规助力过程中,该模型的简化对实际结构的影响不大,而在回正控制行程中影响却很大[10]。
由文献[5-8]可知,以往搭建的实验台都不能很好地随车速和路面附着系数变化而调整转向阻力矩,割裂了其与车辆运行环境的联系,完整地进行试验台验证EPS控制策略有所欠缺,有很大的局限性。
随着计算机技术的发展,LabVIEW作为一个图形化编程软件,是开发试验系统的一种功能强大、方便快捷的编程工具,该软件结合自身的硬件系统,其灵活、图形化的编程方式,丰富的硬件接口,能够很好地满足试验技术要求,在汽车领域取得了很好的应用效果。NI LabVIEW图形化开发环境和PXI模块化硬件平台是硬件在环(HIL)系统应用的理想之选。
试验台由电控液压比例阀、液压加载装置、转向机构及固定底座组成。转向实验台的架构及实验台布置如图2所示。

图2 实验台布置
2.1 仿真程序和界面开发
在Labview环境下建立相应的转向阻力矩模型,程序和界面如图3所示。图3a为硬件在环仿真程序,是基于Labview软件平台的电动助力转向系统模型和输入输出控制的接口模块;图3b为主界面,左边是输入参数窗口,右边显示的是在路面附着系数为0.3时的仿真结果,左下方的是转角传感器输入或正弦模拟输入切换按钮,可以外接转角传感器信号或以软件模拟方式进行仿真。
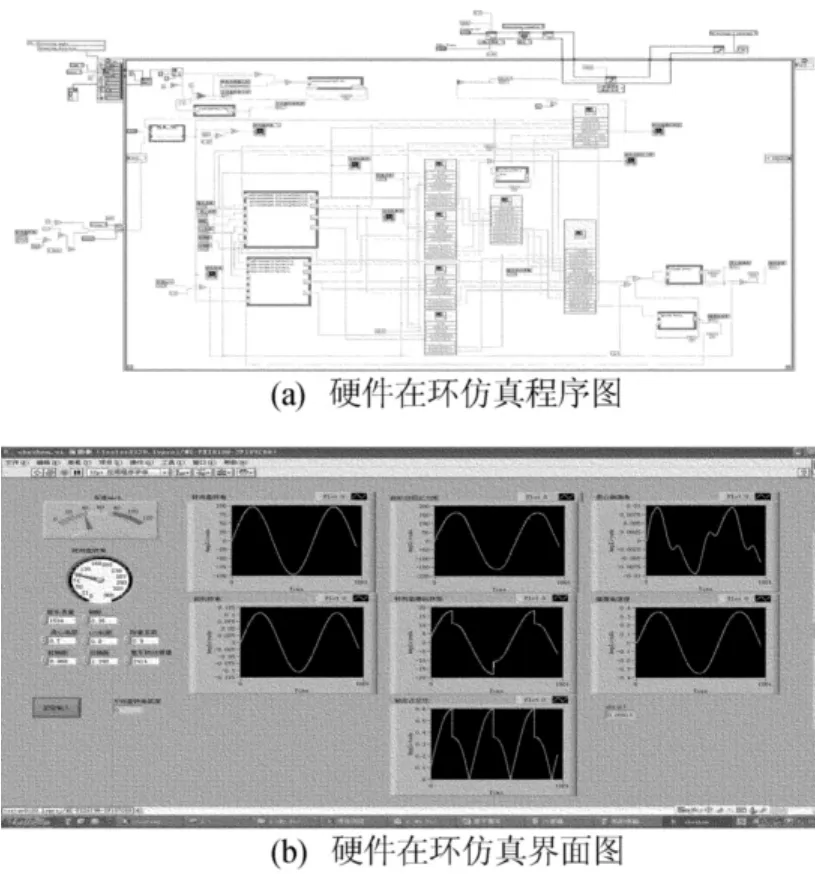
图3 硬件在环仿真程序和界面
2.2 接口系统程序开发
采用NI公司的PXI-1042Q控制器,该控制器有丰富的接口系统(数据采集卡),能够满足一般的系统信号测试。配合Labview RT程序,较好地保证了系统的实时性。接口系统是用来实现软件系统和实际硬件系统连接功能的部分,接口系统控制程序包括转矩传感器、助力电动机电流、转角传感器等信号采集程序以及电液比例控制器控制信号输出程序。
对于信号采集程序,需要进行信号类型(数字或模拟)、采集端口、采样模式、采样频率等的设置。本硬件在环试验平台中,CAN信号属于数字信号类型,其他的如电压采集属于模拟信号范畴。在Labview中,有相关的虚拟仪器(VI)供用户编程使用。
Bosch公司的转角传感器的输出信号为CAN信号,将该信号通过PXI-8464板卡的CAN通讯口传送至硬件在环系统,首先要对其连接线进行改造,然后在Labview平台下进行配置。图4所示为转角传感器接线及配置图。
另外,选择了PXI-6289板卡的ai0、ai1及ai2模拟端口,采用连续采样模式进行主副转矩信号、电流信号的采集,选用3阶Butterworth低通滤波器(截止频率20kHz)对采样信号进行滤波。
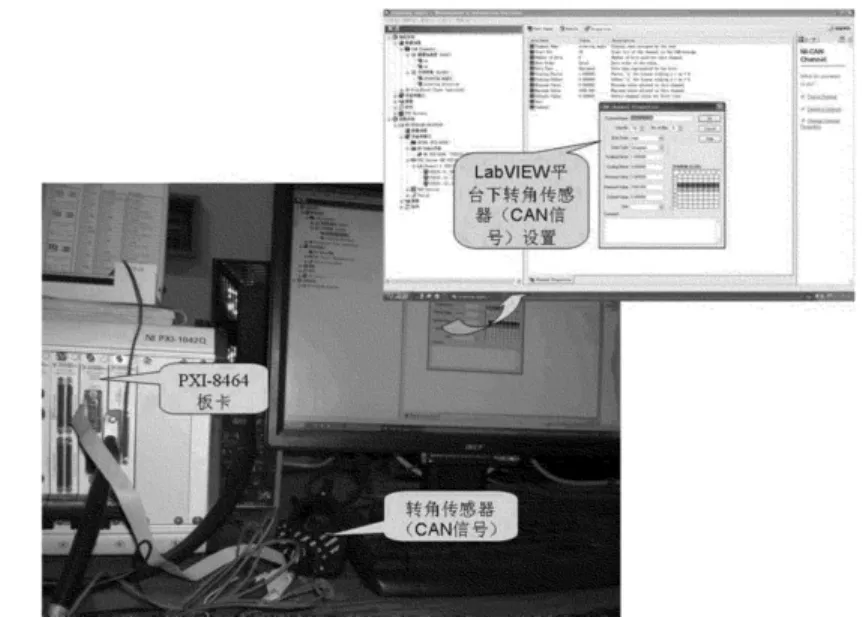
图4 转角传感器接线及配置
信号输出程序与信号采集程序类似,需要进行信号类型(数字或模拟)、发送端口、发送模式、发送频率等设置,如图5所示。
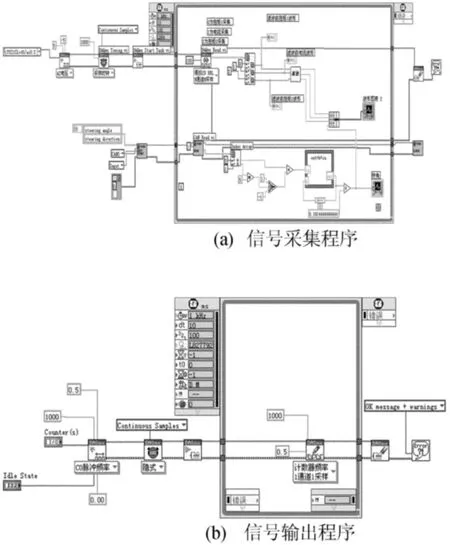
图5 信号采集和输出程序
VT-2000BS40G型电液比例控制器由北京金维硕公司推出,用于VA/E变量叶片泵、A7V、A2V轴向柱塞泵、A6V轴向柱塞电机及DBE系列先导式比例溢流阀、DBE系列先导式比例压力阀的控制。
该电液比例控制器有手动方式和自动控制方式。本方案采用自动控制方式,选择了PXI-6289板卡的ctr0端口,实现对VT-2000BS40G型电液比例控制器的控制。
3 试 验
设计基于路面附着系数的EPS控制策略,试验条件设定为纵向车速40km/h,路面附着系数分别为0.55和0.30,以转向盘转角作为输入,在上述试验台上进行硬件在环试验,输出的试验结果以文档格式进行保存,绘出转向盘操纵转角-转矩、转向盘转角-时间曲线,描述车辆的转向操纵轻便性及回正特性。
车辆转向操纵轻便性硬件在环试验结果如图6所示。
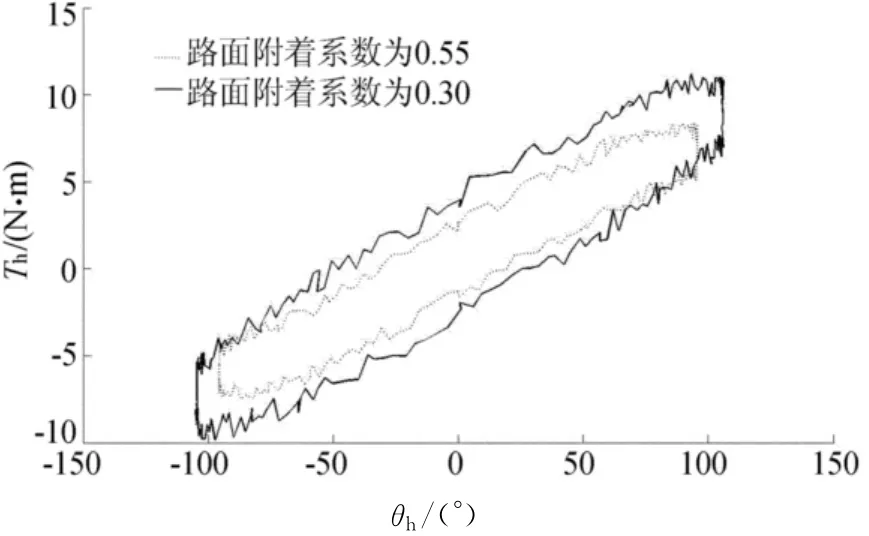
图6 转向操纵轻便性硬件在环试验结果
从图6可以看出,随着路面附着系数的降低,同样条件下转向盘操纵转矩降低;随着路面附着系数的降低,转向操纵转矩饱和时对应的操纵转角减小,这样的路感可以警示驾驶员不能再增大转向盘转角,否则导致侧滑趋势,产生危险。
车辆回正特性硬件在环试验结果如图7所示。
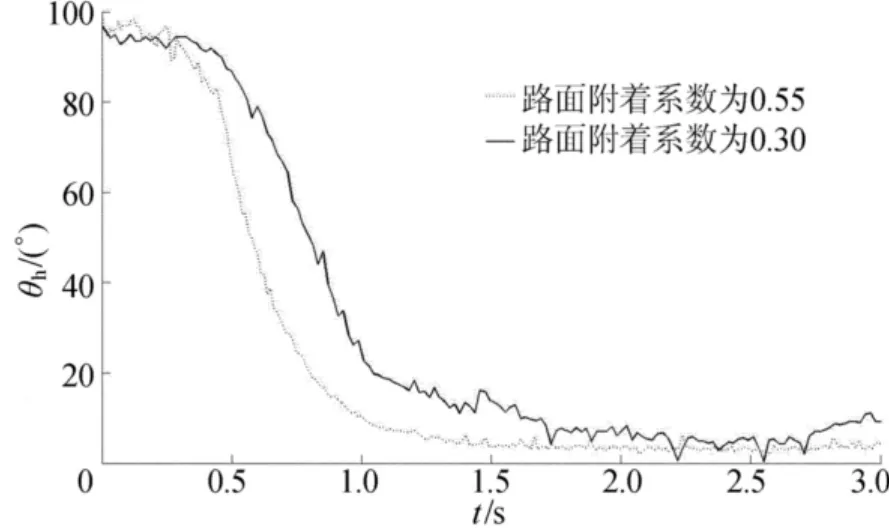
图7 回正特性硬件在环试验结果
从图7可以看出,在初始转向盘位置大致相同的条件下,虽然设计的回正控制策略使电动机提供较大的回正转矩,以提高车辆回正性能,但轮胎自回正力矩随路面附着系数的降低而减小,致使低附着路面条件下,残留转向盘转角大,且回正所需时间较长。
综上所述,该硬件在环试验平台所得出的低附着路面上车辆的转向操纵轻便性及回正特性,与文献[11]的试验结果相吻合,可基于该平台进行EPS控制策略的开发验证。
4 结束语
为解决当前条件下缺乏验证低附着路面上EPS控制策略的实车试验条件的难题,本文以非线性轮胎模型和7自由度整车动力学模型为基础,开发了基于LabVIEW的转向试验台,输入端采用方向盘手动加载,根据当前方向盘转角信号及实车运行参数,对整车动力学模型和轮胎模型进行求解,液压加载机构输出相应的转向阻力矩,可以对低附着路面的EPS控制策略进行硬件在环试验。从试验结果可以看出,该试验平台可以方便地用于EPS系统的研发,验证转向系统的转向操纵轻便性及回正性能。
[1]Yeh C J,Ho S R,Lin M C,et al.Development of a test bench for tuning and validating electric power steering control method[C]//Vehicle Power and Propulsion Conference,2007,VPPC 2007,IEEE,2007:618-622.
[2]王其东,秦炜华,姜武华.基于多体模型和硬件在环试验的汽车EPS控制研究[J].合肥工业大学学报:自然科学版,2010,33(8):1131-1135.
[3]王其东,杨孝剑,陈无畏,等.电动助力转向系统的建模及控制[J].农业机械学报,2004,35(5):1-4.
[4]徐建平,何 仁,苗立东,等.电动助力转向系统回正控制算法研究[J].汽车工程,2004,26(5):557-559.
[5]施国标,林 逸,陈万忠,等.汽车电动助力转向试验台测试系统开发[J].测控技术,2005,24(3):157-162.
[6]邓文才,王 耘,姚栋伟,等.电动助力转向器性能试验系统设计与实现[J].工业控制计算机,2005,24(3):210-215.
[7]姚栋伟,吴 锋,杨志家,等.基于双伺服电机的电动助力转向器硬件在环仿真试验平台[J].浙江大学学报:工学版,2009,43(10):1331-1334.
[8]夏 光,秦炜华,唐希雯.汽车EPS试验台液压控制系统设计[J].汽车电器,2008(2):34-40.
[9]赵林峰,陈无畏,刘 罡.电动助力转向系统全工况模型建模及试验验证[J].农业机械学报,2009,40(10):1-4.
[10]高 勇,陈 龙,袁传义,等.电动助力转向系统回正控制研究[J].农业机械学报,2007,38(5):6-10.
[11]Kurishige M,Tanaka H,Inoue N,et al.An EPS control strategy to improve steering maneuverability on slippery roads[C]//SAE Paper,2002:2002-01-0618.
Development of hardware-in-loop test platform for EPS based on LabviewPXI
ZHAO Lin-feng1, XIA Guang1,2, HUANG He1, GAO Ming3
(1.School of Machinery and Automobile Engineering,Hefei University of Technology,Hefei 230009,China;2.Institute of Automobile Engineering Technology,Hefei University of Technology,Hefei 230009,China;3.Zhuzhou Elite Electromechanical Co.,Ltd.,Zhuzhou 412002,China)
Based on the nonlinear tire model and seven-degree freedom vehicle dynamic model,the steering resistance torque dynamics model is established based on the Labview platform.The steering angle signal is used as the input,the Labview RT module is used to download the modular program to the real-time target hardware PXI and control the electrohydraulic proportional controller with the hardware interface circuit,and then the hydraulic loading devices are driven to simulate the steering resistance torque.The results show that the designed hard-in-the-loop(HIL)platform can be applied in the test of the characteristics of EPS,and the development and parameters control of EPS controller.
electric power steering(EPS);test platform;steering resistance torque;hard-in-the-loop(HIL)
U463.44
A
1003-5060(2012)11-1447-05
10.3969/j.issn.1003-5060.2012.11.003
2012-03-26;
2012-05-29
合肥工业大学博士专项科研基金资助项目(2010HGBZ0614);中央高校基本科研业务费专项资金资助项目(2011HGQC1010);中航工业创新基金资助项目(CXY2010HFGD26;CXY2010HFGD27)
赵林峰(1979-),男,安徽宣城人,博士,合肥工业大学讲师.
(责任编辑 吕 杰)
