基于DSP的三相PWM整流PI调节器设计
2012-07-18杨俊莲
杨俊莲
(辽宁装备制造职业技术学院,辽宁 沈阳110161)
0 引 言
随着社会经济的快速发展,在减少电网谐波污染及无功补偿方面有很强优势的PWM整流技术越来越受到人们的关注。该技术可以实现接近正弦电流输入、单位功率因数、能量四象限运行(双向流动)、动态响应速度快等优点[1]。电压定向的PWM整流器技术应用较为广泛,这种整流器需要控制整流器的输出电压及输入电流两个变量。因此,如何合理的设计控制两个变量的调节器参数以保证在电源电压波动范围内能实现良好的控制性能很重要。
本文首先分析了PWM整流器工作原理,讨论了整流器a-b-c和d-q数学模型,在此基础上建立前馈解耦控制系统框图,并且从系统可行性角度提出电流环和电压环PI调节器设计方法,最后给出整流器的simulink仿真结果。
1 PWM整流器工作电路结构及数学模型
三相PWM整流器主电路如图(1)所示,电源电压用ea,eb,ec表示,经过整流器整流的输出电压使用ua,ub,uc表示,负载电流使用iload表示,则可以得到a-b-c数学模型为:

图1 PWM整流器工作电路结构

直接对三相交流信号进行闭环控制不仅难度较大而且精度也不高,因此使用矢量分解法得出d-q坐标系下PWM整流器数学模型:
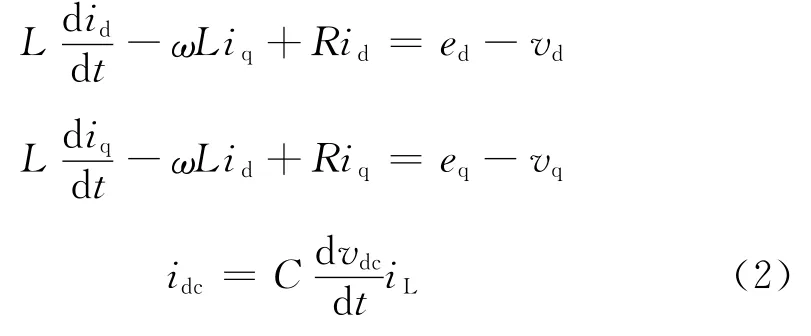
式中,ω为旋转角速度。从公式(2)可以看出,d-q轴变量存在相互耦合项,不仅导致无法对电压进行单独控制,而且增加了设计控制器的难度。为此,需要采用前馈解耦控制的方式对ud、uq进行前馈补偿,控制框图如图2所示。
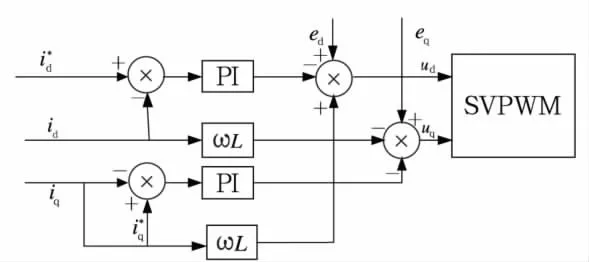
图2 前馈解耦控制框图
2 PI调节器设计
2.1 电流调节器
电流环是三相PWM整流器双闭环控制系统中的内环,主要作用是接收电压外环输出的电流指令后进行电流控制。抗干扰性是衡量交流调速系统性能的重要指标[2],因此选用抗干扰性能较好的典型II型控制系统。另外,从图(2)可以看出,两个电流PI调节器功能及参数相同,因此,以iq电流控制为例进行说明,结构如图3所示。

图3 电流内环结构
其中,参数K表示调节器的放大倍数,参数Ts表示PWM开关周期1/2,由此可以推导出电流内环开环传递函数[3]:

下面需要确定中频宽h的取值,h越小系统的抗干扰性能就越好,但h过小系统的跟随性就会变差。因此,综合考虑系统跟随性和抗干扰性能取h=5。根据Mr最小准则确定典型II型系统的参数关系,有h=,则有

由上式得到:
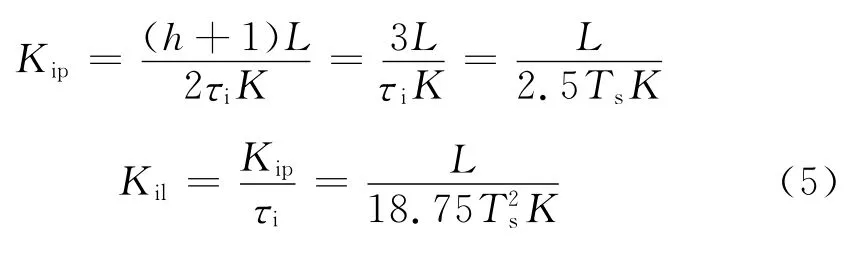
在上式中,根据已知参数Ts,K,可求出PI调节器的参数值。
2.2 电压PI调节器设计
三相PWM整流器外环控制为电压环,电压环的作用是稳定直流输出电压并升压使其高于输入电压的峰值[4],其控制框图图4所示。

图4 电压外环结构

式中,电流内环闭环传递函数G1(S)可近似为一阶惯性环节;整流器的输出传递函数为G2(S),其中:

上式中Em和Im为输入电压和输入电流的幅值。通常情况下,Tz≪Tp[5],则有

由此可以得到电压外环的传递函数为:

开环传递函数可以简化为:

则电压外环闭环传递函数为:

根据二阶系统的标准形式有[6]:

PI调节器参数整定值ε=0.707[7],从而可以得到电压外环PI调节器的参数值。
3 仿真分析
在 MATLAB/SINMULINK 环境下对三相PWM整流器进行了仿真实验。

图5 A相输入电压和输入电流波形
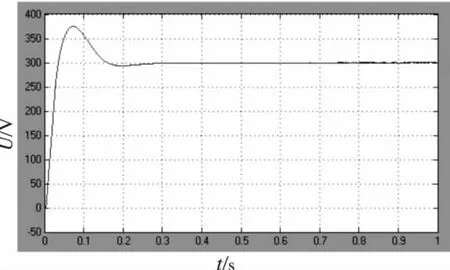
图6 输出电压波形
仿真参数设计如下,三相输入相电压110 V,直流输 出310 V,输入电感为6.5 mH,直流滤波 电容2 200μF。图5为A相输入电压和输入电流波形,可以看到输入电流为相位跟随电压的正弦波。图6为输出电压波形,可以看出直流输出电压比较稳定。
4 系统设计与实现
DSP(数字信号处理器)是新一代运算控制芯片,具有运算控制能力强,成本低、可靠性高等优点,同时可完成故障诊断、数据存储等提高系统智能化的功能。本设计方案中采用TI公司的TMS320F240型DSP作为系统主电路,系统底层控制软件使用DSP汇编语言实现。在控制软件中需要实现电压空间矢量PWM控制、电流电压采样、过零检测、电压和电流双闭环的PI控制等功能。

图7 系统控制结构
系统输入电流ia,ib通过电流传感器进入系统采样电路,该采样电路将电流转换成0~5 V的电压信号并输入至DSP的A/D端口,同步检测电路利用内部的电压传感器及电压转换电路输出脉冲信号至DSP的CAP(捕获单元),通过检测脉冲信号的上升沿及两个上升沿的间隔时间就可以获得相位同步信号及电网频率;系统输出直流电压通过直流电压检测电路信息送入DSP的A/D端口;DSP输出的PWM信号经过光电耦合器隔离后作为IPM模块的驱动电路;IPM所有的故障输出通道通过一个与门后,送入DSP的外部输入可屏蔽中断,起到保护智能功率模块IPM的作用。系统控制结构如图7所示。
5 结束语
本文首先分析三相PWM整流器a-b-c及d-q数学模型,在此基础上设计了基于DSP的PWM控制系统,分别根据控制要求设计了PI调节器的参数。最后的方针结果表明系统动态性能和稳态性能优异,从而验证了这种设计方法的优越性和正确性。
[1] 张崇巍,张 兴.PWM 整流器及其控制[M].北京:机械工业出版社,2003.
[2] 余发山,郑 征.自动控制系统[M].徐州:中国矿业大学出版社,2005.
[3] 杨德刚,赵良炳,刘润生.三相高功率因数整流器的建模及闭环控制[J].电力电子技术,1999,33(5):49-51.
[4] 胡寿松.自动控制原理[M].北京:科学出版社,2006.
[5] 朱永亮,马 惠,张宗濂.三相高功率因数PWM整流器双闭环控制系统设计[J].电力自动化设备,2006,26(11):87-90.
[6] 赵振波,李和明.单位功率因数PWM整流器双闭环PI调节器设计[J].电工技术杂志,2003,(5):68-71.
[7] Giorgio S,Paolo M,Leopoldo R.Power factor preregulators with improved dynamic response[J].IEEE Trans on P E,1997,12(2):343-349.
