开关变换器补偿网络的频域设计与仿真
2012-07-18于岳川
于岳川
(武汉大学电气工程学院,湖北 武汉 430072)
0 引 言
开关电源以其效率高、尺寸小、重量轻等优点,广泛应用于各个领域。为了保证开关电源输出电压的质量,需要对开关变换器设计补偿网络。本文以Buck电路为例,讨论电压控制型开关调节系统补偿网络的设计与仿真。与其他控制方式相比,电压控制型开关调节系统具有控制方式简单、稳定、易于设计等优点,同时也可以保证很好地稳压精度[1]。
1 开关变换器补偿网络的频域设计步骤
根据经典控制理论,开关调节系统频域设计步骤可总结为:(1)确定系统的控制方法;(2)绘制变换器的开环传递函数bode图;(3)根据变换器开环传递函数的特点,结合对系统性能指标的要求,选择合适的补偿网络类型;(4)确定补偿网络参数;(5)校验补偿后系统的性能。为叙述方便,将电压采样网络和补偿网络合并,称之为电压控制器。将电压控制器以外的环节合并,称之为控制对象。再根据控制对象的特点,合理选择补偿网络的类型,并结合系统对稳态精度和动态性能以及稳定裕度的要求,确定补偿网络参数。
2 Buck电路的补偿网络设计
设Buck电路工作在CCM模式下,电路的参数为:输入电压Ug=16 V,滤波电容C=500μF,电容等效串联电阻RC=8 mΩ,储能电感L=500μH,电感等效电阻RL=50 mΩ。输出电压Uo=6 V,负载电阻1 Ω,参考电压Uref=6 V,PWM发生器锯齿波幅值UM=2.8 V,开关频率50 kHz。非理想Buck电路如图1所示。

图1 非理想Buck电路
设计步骤如下:
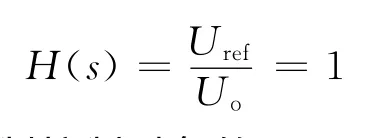
步骤1 设计电压采样网络。由于在直流频率点,系统为深度负反馈系统,故电压采样网络传递函数
步骤2 绘制控制对象的bode图:对于本文的非理想Buck电路,其控制-输出的传递函数为[1]:
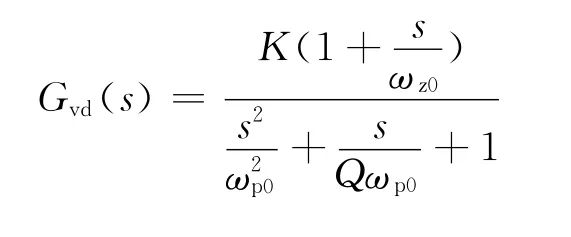
其中:
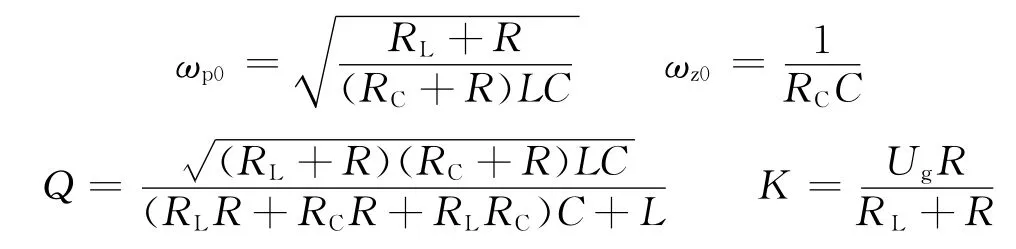
式中,ωz0为电容的ESR零点。代入数据得到控制-输出的传递函数为:

由MATLAB得到传递函数开环bode图,如图2所示。

图2 补偿前系统开环bode图
由图2可以看出,低频段的斜率为零,说明系统存在稳态误差;相位裕度为13°左右,稳定程度不够;在高频段的斜率为-40 dB/dec,对高频噪声的抑制能力较好。鉴于此,需引入补偿网络,使各个频段的特性得到改善。
步骤3 补偿网络的设计
鉴于步骤2中的分析,为了改善系统的稳态精度,需要使系统在低频段以-20 dB/dec的斜率下降,故补偿网络需要包含积分环节;为了拓宽频带并且增加相位裕度,需要在剪切频率之前的频段增加两个零点;为抵消ESR零点对电路性能的影响,需引入一个极点与ESR零点抵消。同时为了保证高频抗干扰能力又不至于引入过多的相位滞后,需要在高频段再引入一个极点。综合以上的分析,选择双极点-双零点型PID补偿网络,其对应电路(图3)及传递函数形式如下:

确定参数如下:
为了提高穿越频率,设补偿后系统开环传递函数的幅值穿越频率为开关频率的1/6,即fc=50/6=8.3 kHz左右。为了得到足够的相位裕量,希望补偿网络在此频率附近提供最大的超前相位。
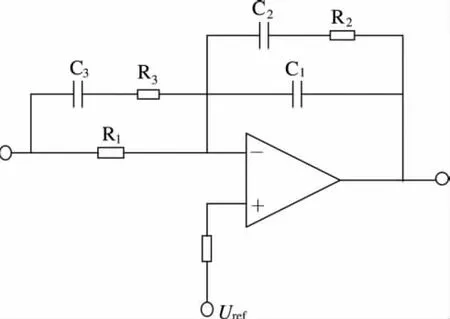
图3 双极点-双零点型PID补偿网络
第一零点应能提供足够的超前相位以提高稳定裕度,故第一零点应取的较小。取第一零点角频率ωz1=100 rad/s;第二零点主要起到拓宽频带的作用,因此应取较大值,但是不能超过ωc,取ωz2=30×103rad/s。
第一极点用于抵消ESR零点的作用,故取第一极点为角频率ωp1=ωz0=2.5×105rad/s;第二极点用于提高系统抗高频噪声的能力,取ωp2=1.5×105rad/s。由以上确定的各参数计算PID控制器各元件的参数如下:
取R1=100 kΩ,则其他元件参数为:R2=500 kΩ,R3=1.2 kΩ,C1=13 pF,C2=20 nF,C3=3.33 nF。进而确定K1=500。
由MATLAB得到补偿网络的bode图,如图4。
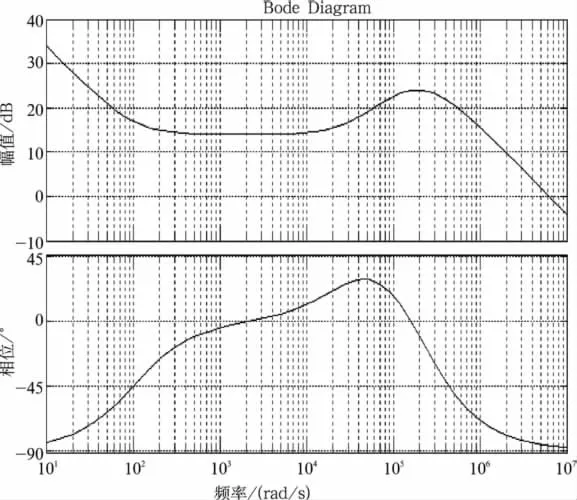
图4 补偿网络的bode图
由图4可得,该补偿网络在7.7 kHz附近提供的最大超前相位角,与设计初衷吻合。
由以上结果可得到加入补偿网络后系统的开环传递函数表达式为:

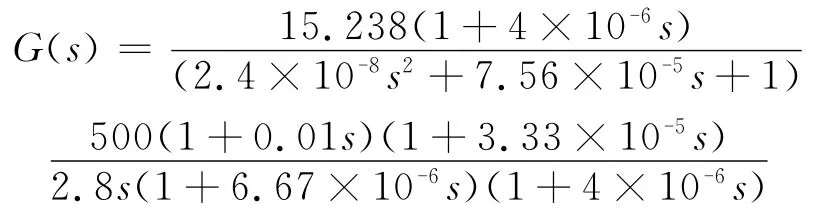
由MATLAB得到加入补偿装置后系统的bode图,如图5。

图5 补偿后系统开环bode图
由图5可得:校正后系统的穿越频率fc=7.1 kHz,相位裕度约为45°,符合设计要求。
3 闭环系统的simulink仿真
为了验证补偿网络的合理性,根据以上计算所得的传递函数,应用simulink中PowerSystems工具箱搭建仿真电路图如图6。
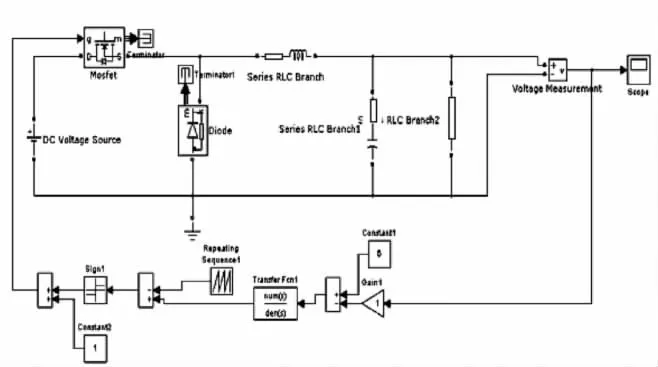
图6 simulink电路仿真模型
为了测试加入补偿网络后系统的性能,分别作如下实验:
(1)在0.07 s负载突然加倍;(2)在0.07 s输入电压由18 V跃变到16 V;实验结果如下。
图7为负载扰动的情况,图8为输入扰动的情况。图中曲线1为未加补偿时输出电压波形,曲线2为加入补偿后输出电压的波形。根据仿真结果,得到系统的性能指标如表1和表2所示。

表1 负载扰动时系统性能指标

图7 输入扰动时输出电压波形

图8 负载扰动时输出电压波形

表2 输入扰动时系统性能指标
表中ts为暂态恢复时间,Uo%为电压稳定度,ΔUo为过冲电压。由表1和表2可见,加入补偿网络后,系统的响应速度和稳态精度都有了明显的改善。
4 结 论
本文采用频域法对电压型调节系统进行了设计,其主要思路是:根据对系统性能的要求(快速性、准确性、稳定性),结合系统的开环bode图对补偿网络进行设计。系统开环bode图的低频段决定了系统的稳态精度,中频段决定了系统的稳定裕度及响应速度,高频段决定了系统抗高频噪声干扰的能力。在设计时应结合控制对象的特点设计补偿网络各个频段的参数,合理配置补偿网络零极点的位置,使系统获得较好的性能指标。从仿真结果来看,加入补偿网络后系统性能得到了改善,与理论分析结果相一致,验证了设计的合理性。
[1] 张卫平.开关变换器的建模与控制[M].北京:中国电力出版社,2006.
[2] 胡寿松.自动控制原理(第5版)[M].北京:科学出版社,2007.
[3] 林 飞,杜 欣.电力电子应用技术的 MATLAB仿真[M].北京:中国电力出版社,2009.
[4] 余明杨,蒋新华,王 莉,等.开关电源的建模与优化设计研究[J].中国电机工程学报,2006,26(2):165-169.
[5] 陈亚爱.开关变换器的使用仿真与测试技术[M].北京:机械工程出版社,2009.
[6] Ruzbehani M,Zhen Louwei,Wang Mingyu.A new approach in combining one-cycle controller and PID controller[C].Industrial Electronics,2004 IEEE International Symposium on Volume 2,May 2004:1173-1177.
[7] Ridley R B.A new,continuous-time for current-mode control[J].IEEE Transactions on Power Electronics.1991,6(2):271-280.