基于模糊自适应PID的主汽温控制系统
2012-07-15王爱军宫广东张小桃殷冠军
王爱军,宫广东,张小桃,殷冠军
(华北水利水电学院,河南 郑州 450011)
基于模糊自适应PID的主汽温控制系统
王爱军,宫广东,张小桃,殷冠军
(华北水利水电学院,河南 郑州 450011)
为了改善传统串级PID主汽温度控制系统的控制效果,提出了采用模糊自适应控制器的串级主汽温控方案.主调节器采用模糊自适应PID控制器,副调节器采用传统PID调节器.利用模糊规则,主调节器PID参数可根据误差信号动态调整.仿真结果表明,该系统在机组负荷较大范围变化时,其控制品质优于传统PID串级控制系统.
主汽温;串级PID控制;模糊自适应;参数自整定
主汽温度是锅炉运行质量的重要指标之一,对电厂的安全性和经济性有较大的影响.主汽温的控制通常采用串级PID控制系统,但由于PID参数固定,其难以适应负荷较大的变化.为改进传统的主汽温PID串级控制的效果,近些年来,研究者在主汽温的控制方面做了一些研究.文献[1]采用无模型自适应控制用于主汽温控制,对定值扰动时响应无超调;文献[2]采用预测控制方案,把预测函数控制方案用于主汽温控制;文献[3]采用模糊神经网络控制,将神经网络具有的自学习能力和PID控制器的鲁棒性相结合.虽然一些控制方法对主汽温的调节取得了一定的效果,但能够适应工况变化的可变控制器参数的控制方案并不多.
笔者基于传统串级PID主汽温控制系统,主回路使用模糊自适应PID控制器,利用模糊控制规则在线对PID参数进行修改,构成模糊自适应串级PID系统,对不同工况下的锅炉主汽温进行了模糊控制研究,与传统的PID控制系统的效果进行了对比,主汽温控制系统的控制品质得以提高.
1 主汽温度的动态特性
主汽温度具有大迟延、大惯性、时变性和非线性等特点.根据福州电厂350 MW机组数据[4],得到减温水流量发生变化时的主汽温动态数学模型,见表1.其中Gi(s)为导前区对象传递函数;G(s)为主汽温对象传递函数.
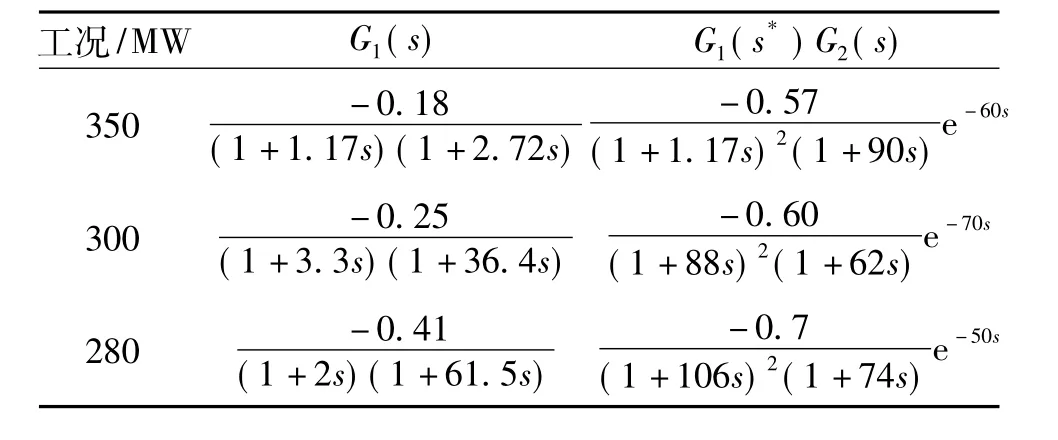
表1 导前汽温和主汽温动态数学模型
随着负荷的变化,主汽温动态特性有明显的变化.3种工况下主气温动态特性如图1所示.
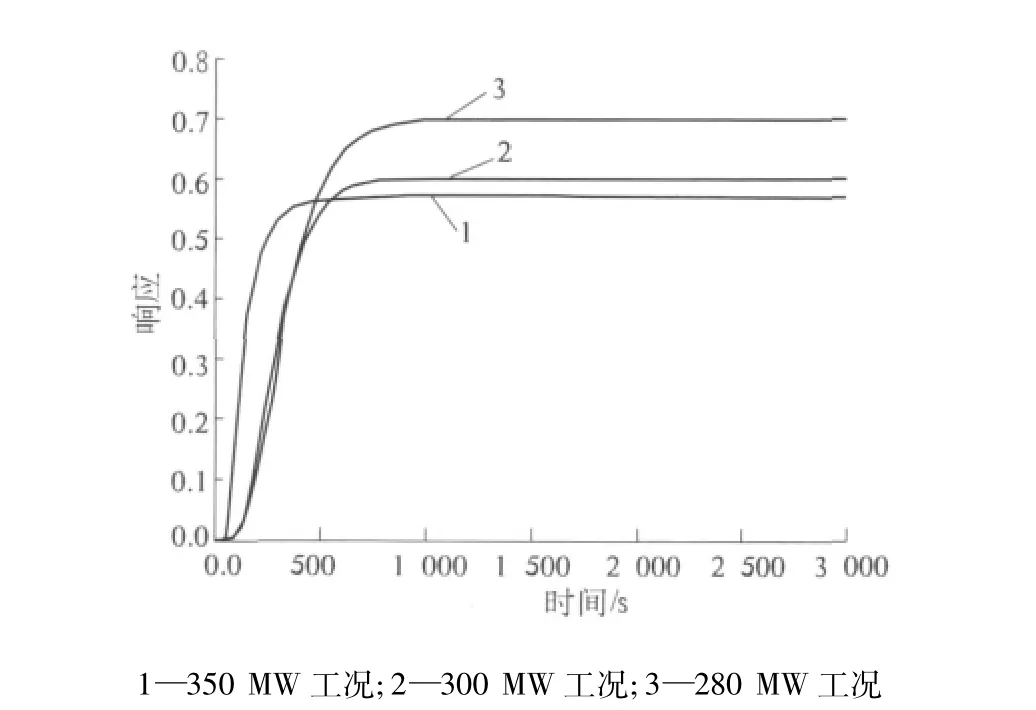
图1 3种工况下主汽温度动态特性
2 模糊自适应PID串级主汽温控系统
2.1 控制系统原理
模糊串级PID主要是采用模糊自适应控制器和传统PID控制器相结合得到的控制系统,其基本结构如图2所示.
主回路采用模糊自适应PID控制器调节,副回路采用传统的P调节.其中GP(s)为副调节器对象传递函数;WP为外部扰动;de/dt为误差变化量;ke为误差量化因子;kec为误差变化量化因子;ku为输出量比例因子;KP为模糊控制器输出的比例系数;Ki为模糊控制器输出的积分系数;Kd为模糊控制器输出的微分系数;γθ1为导前温变送器斜率;γθ2为主汽温变送器斜率;rin为给定值;θ1为导前汽温;θ2为主汽温度.

图2 控制系统原理图
模糊串级PID主汽温控制系统的工作原理为:主汽温和给定值比较,其差值信号e经过模糊自适应PID控制器处理后,形成校正信号,通过副调节器改变减温水量,最终使主汽温恢复到给定值.误差e和误差变化de作为模糊控制器的2个输入量,分别乘量化因子ke,kec,使输入量模糊化供模糊逻辑决策系统使用.模糊逻辑决策器根据模糊控制规则决定模糊关系,得出控制器的模糊输出控制量KP,Ki,Kd,实施对串级回路的控制.通过不断检测e和de,根据模糊控制规则对KP,Ki,Kd进行在线修改.
2.2 模糊自适应控制器的设计
模糊自适应PID控制系统为2输入、3输出系统[5],输入量为误差 e和误差变化 de,输出为 KP,Ki,Kd.以模糊集合作为它的数学基础,核心部分是模糊控制器,主要包括输入量的模糊化、知识库的建立、模糊推理和精确化4部分.
2.2.1 精确量的模糊化
模糊控制器的输入量和输出量需要用量化因子ke,kec,ku分别把语言变量误差、误差变化和输出的语言值转化到模糊子集上.设定输入变量e和de的语言值的模糊子集为{负大,负中,负小,零,正小,正中,正大},分别简记为{NB,NM,NS,ZE,PS,PM,PB},输出变量 KP,Ki,Kd的模糊子集也为{负大,负中,负小,零,正小,正中,正大}.根据实际情况,选取误差 e的基本论域为[-5,5],de,KP,Ki,Kd的模糊论域定为[-5,5].
2.2.2 模糊控制规则的设计
设计的基本原则是保证控制器输出能够使系统输出响应的动静态特性达到最佳.根据对控制系统设计经验的总结,可以得到 PID参数 KP,Ki,Kd的自整定规则及模糊控制规则如下.
根据以上控制规则建立参数KP,Ki,Kd的自整定控制规则,见表2.
3 仿真分析
针对上述主汽温度系统对象,组建的PID串级调节系统和模糊串级PID参数自适应系统如图3所示.图3上半部分为模糊串级PID参数自适应控制系统,下半部分为常规串级PID控制系统.
常规串级PID调节系统主调节器采用PID调节,副调节器采用比例调节.模糊控制器参数ke=2,kec=12,ku=0.6,常规串级 PID 控制器 P=11.5,I=0.2,D=422.固定常规串级PID参数和模糊控制器参数,以表1中3种不同工况下主汽温动态数学模型为受控对象,对设计的模糊串级PID控制系统和常规串级PID控制系统进行仿真研究,得到阶跃响应曲线,如图4所示.

表 2 KP,Ki,Kd 整定规则
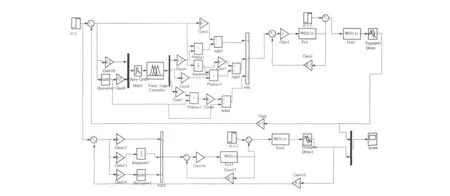
图3 串级PID和模糊串级PID参数自适应仿真图

图4 3种工况常规串级PID和模糊串级PID阶跃响应
350 MW工况时,对模型加输入阶跃扰动,系统输出响应如图4(a)中曲线1,2所示.尽管线1的调节时间和上升时间变小,但超调量大幅增加,不利于系统的稳定运行,而线2相对于线1有着更小的超调和更短的调节时间,对系统的稳定运行还是有利的.在t=3 000 s时加入外部扰动,线1对扰动的抑制作用略差于线2.
300 MW工况时,对模型加输入阶跃扰动,系统输出响应如图4(b)中曲线1,2所示.此时线1的超调变大,调节时间也相对增加,使得控制品质有明显变化.线2基本无超调,调节时间相对于350 MW工况有所增加,但与同工况下的线1比较仍然很小,为其45%左右,控制过程仍然平稳.在t=3 000 s时加入外部扰动,线2能够很快克服扰动,对扰动有很好的抑制作用.
280 MW工况时,对模型加阶跃扰动,系统输出响应如图4(c)中曲线1,2所示.线2的控制超调小,上升时间短,系统响应速度加快,调节时间非常短,控制过程更加平稳,控制效果明显优于线1.在t=3 000 s时加入外部扰动,对扰动有较好的抑制作用.
模糊控制器通过模糊规则不断调整模糊输出以便更好地适应工况的变化,3种工况下模糊输出参数 KP,Ki,Kd变化曲线如图5所示.
由280 MW工况变化至300 MW工况,相应的模糊输出量KP,Kd减小,Ki增大,可以看出常规串级PID系统和模糊串级PID系统的超调量均有所减小,两者的上升时间增大,系统响应速度变慢,控制系统的调节时间增加,控制过程趋于平稳;由300 MW工况变化至350 MW工况,模糊输出量KP,Kd增大,Ki减小,常规串级 PID系统和模糊串级PID系统超调量有所增加,但小于280 MW工况时的超调,上升时间明显减小,系统的响应速度大幅增加,调节时间大幅减小,系统更快趋于稳定.
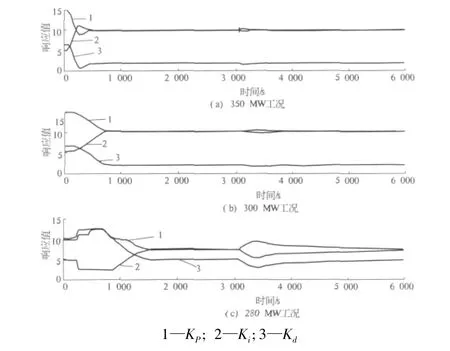
图5 模糊输出参数KP,Ki,Kd变化过程曲线
4 结语
利用模糊串级PID自适应系统对主汽温调节做了研究.分析了主汽温动态特性,设计了模糊自适应控制器,将精确的输入量模糊化,根据经验设计模糊规则,并对设计的控制系统进行仿真.在固定参数不变情况下对3种工况做了比较.结果表明:3种工况下,模糊控制器输出参数KP,Ki,Kd对系统性能有很大影响;模糊串级PID自适应控制系统比常规串级PID控制系统有更好的适应性、动态特性和稳定性,对主汽温控制能够取得良好的控制效果.
[1]马平,李伟,郑贵文,等.基于无模型自适应控制的主汽温度控制系统[J].电力科学与工程,2006(1):19-21.
[2]王国玉.串级控制在主汽温控制系统中的应用研究[J].中国电机工程学报,2002,22(12):50 -55.
[3]平玉环,于希宁,孙剑.模糊神经网络在主汽温控制系统中的应用[J].工业控制技术,2010(8):80-82.
[4]张小桃,倪维斗,李政,等.基于主元分析与现场数据的过热汽温动态建模研究[J].中国电机工程学报,2005,(3):131-135.
[5]韦巍,何衍.智能控制基础[M].北京:清华大学出版社,2008.
The Control System of Main Steam Temperature Based on the Self-adaptive Fuzzy PID
WANG Ai-jun,GONG Guang-dong,ZHANG Xiao-tao,YIN Guan-jun
(North China Institute of Water Conservancy and Hydroelectric Power,Zhengzhou 450011,China)
In order to improve the effect of traditional cascade PID main steam temperature control system,the paper proposes the cascade control system by using self-adaptive fuzzy controller.The fuzzy self-adaptive PID controller is used as the primary regulator,and the traditional PID is used as a secondary regulator.By use of the fuzzy rule,the PID parameters of the primary regulator can be dynamically regulated according to the error signal.The simulation research shows that the fuzzy self-adaptive PID controller brings about superior control quality to the traditional PID cascade control system when the unit load demonstrates a large range variety.
main steam temperature;cascade PID;fuzzy self-adaptive;parameter self-adjustment
1002-5634(2012)02-0075-04
2011-12-30
河南省教育厅自然科学研究资助项目(2008A470005).
王爱军(1967—),男,河南温县人,副教授,主要从事发电厂在线监测与系统优化方面的研究.
(责任编辑:杜明侠)
