基于DSP+CPLD的塔康系统测距/测位实现
2012-07-12陕西凌云电器总公司赖杰鹏
陕西凌云电器总公司 赖杰鹏
TACAN是1955年研制并投入装备的近程无线电导航系统,为适应舰载、移动台站而开发的战术空中导航系统。
1.系统工作原理
其测位原理是机载设备接收地面信标台天线辐射特定的方位信号(其中包括基准和包络信号)后经过处理,测量出基准与包络之间的相位差,并显示,完成测位功能。
距离测量是根据二次雷达工作原理,机载设备以80~120Hz(搜索状态)或20~30Hz(跟踪状态)速率发射询问脉冲对信号,地面信标接收到询问脉冲信号后,经过一个固定延迟,在向机载设备发射应答脉冲对信号。机载设备接收到信标发射信号后,经过识别选择出对自己的测距应答脉冲,并测量出询问脉冲与应答脉冲之间的时间间隔。利用这个间隔T,按下式换算出机载设备与信标台之间的实际距离D=1/2×C×(T-T0),C为电波在空间的传播速度,取为3×108m/s,T0为信标台的固定延时。公式计算考虑发射询问信号时和接收回答信号时飞机位置的变化,因为飞机运动速度想对于无线电波的传输速度而岩是相当缓慢的,在信号传播的短时间内飞机位置的变化对计算精度相比较是可以忽略不计的。
2.主要信号形式以及信号特性
TACAN视频信号是地面信标台不断通过天线向其周围空间发射电磁波信号,经机载设备接收并解调后输出的塔康视频信号,它由有一定规律的外包络调制的数千个脉冲或脉冲对组成,内含有相应的方位和距离等信息。
TACAN视频信号是由钟形脉冲组成,脉冲应为准钟形脉冲(高斯形);脉冲上升时间:2.0±0.25μs;脉冲下降时间:不超过3.0μs;脉冲宽度:3.5±0.50μs。主要功能用作普通精度方位、距离的测量,工作状态R或R/T,A/A-R或A/A-R/T,如图1。
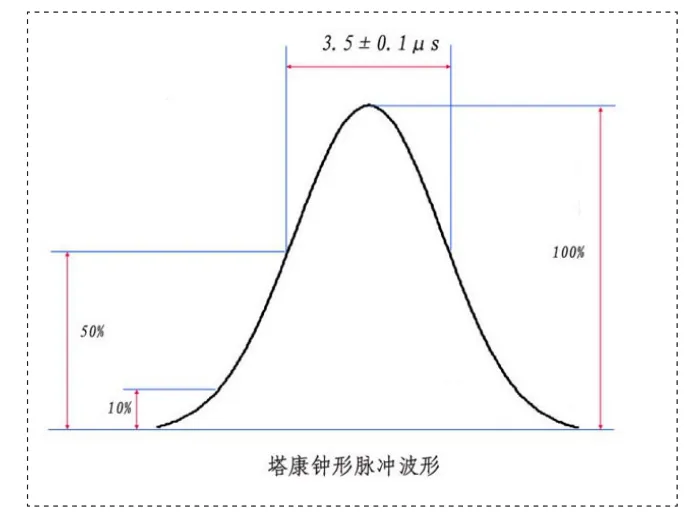
图1
TACAN视频信号的识别信息,视频信号是由大约2700对脉冲对组成,其中包括主基准脉冲群、辅基准脉冲群、识别信号、距离应答信号、随机填充脉冲。编码关系如表1所示。
3.测距的主要工作原理及过程
3.1 噪声过滤控制过程
先对采样到的1V以上视频脉冲计数,如超过6000个/秒,即输出噪音电平信号到噪音AGC控制,使视频信号中噪声幅度小于1V;同时通过脉宽鉴别电路,识别视频信号脉冲宽度,过滤掉小于1.6μs、大于6.4μs的脉冲,即噪声和强干扰,输出经50%脉冲幅度检波的矩形脉冲进行译码。
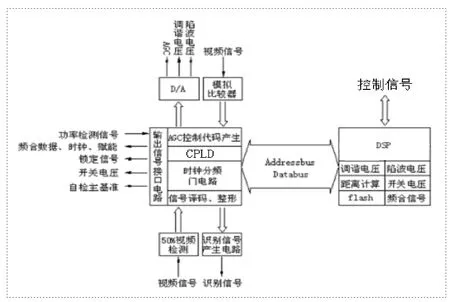
图2 硬件原理框图
3.2 脉冲对译码过程
当CPLD冲后,首先将计时值存入缓冲内存,如在T/R-X状态时,判断其与前面已存入的一个脉冲间隔时间是否为12±0.5μs,如“是”则认为是一对编码脉冲,即将前一脉冲时间值计入已译码脉冲内存有待进一步处理并将缓冲内容清零,同时输出一译码选通标记脉冲。如与前一脉冲间隔时间无任何关系或无前一脉冲,则可认为该脉冲为第一脉冲,可将计时值存入缓冲内存待用。在A/A-X状态时,收到的脉冲为单脉冲信号,可直接计入译码脉冲内存有待处理。
3.3 信号分类识别方法
在R/T-X工作模式,CPLD有4类,一是随机填充脉冲,只起填充视频外包络的作用,在此无任何意义,每秒2700对左右,占总数的74%,二是主、辅基准脉冲群,每秒135组900对占总数的24%。三是距离回答脉冲,每秒25~100对,占总数的2%,四是有规律的识别信号脉冲,此时无随机及回答脉冲。
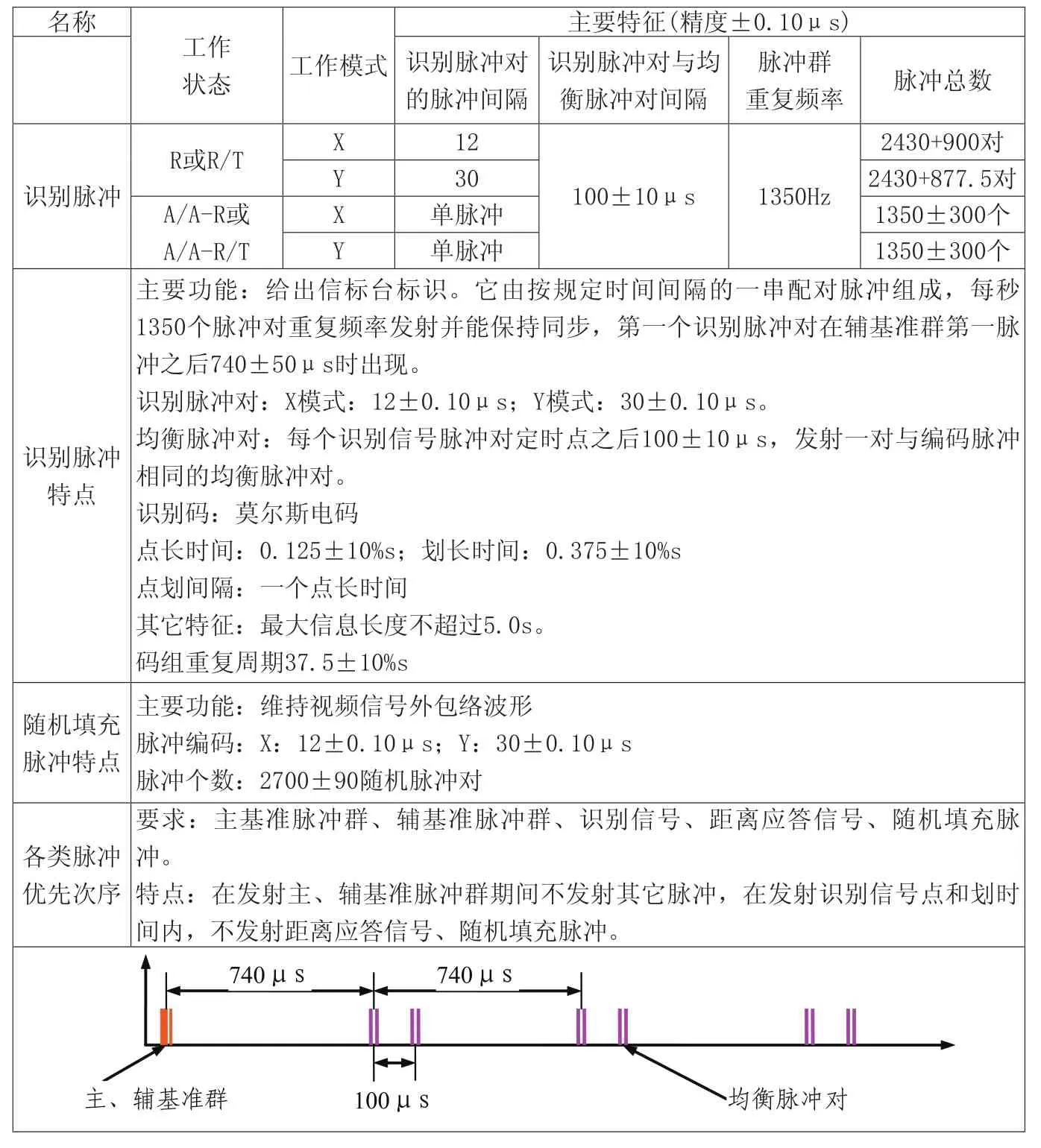
表1 塔康视频信号识别信息
主基准脉冲群:按同样对待相邻脉冲的方法对译码脉冲内存的脉冲计时值,进行判断,如T/R-X状态时,主基准脉冲群规律为12对12μs编码脉冲对,间隔30μs,如果收到一组脉冲发现间隔30±0.5μs且编码为12±0.5μs的脉冲对多于8对即可认定是主基准群,当然,为避免干扰,可与前一主基准群进行比较,判断是否是主基准群,然后输出译码选通标记脉冲并开始主基准计时,同时与通过信号处理识别出的15Hz可变方位信号正斜率拐点的选通标记脉冲定时点比较,输出16位计时值即方位数据。
辅基准脉冲群:同样,T/R-X状态时,辅基准群为间隔24μs编码12μs的6对脉冲群,如连续收到4对具有该规律的信号脉冲,可认定是辅基准群而发出辅基准定位信号。识别信号:将收到的每一组信号变为一个单脉冲,主、辅基准群也各化为一个单脉冲进入内存,每25ms判断一次,看是否有间隔100±10μs的脉冲对在25ms内连续出现25次(极限35次)或断续出现25次,如有即认为是有效识别信号并发出1350Hz识别信号经过隔离放大输出,直到某一25ms区间无该规律信号出现为止,按莫尔斯码的规律,点长信号125±12.5ms,划长信号375±37.5ms,在最坏情况下,点长信号可在4个25ms区间识别到,划长信号可在14个25ms区间识别到,采样判断区间满足正常使用要求,同时可判断输出台址码。
回答信号:对于回答信号的识别比较复杂一些,可分为“搜索”、“跟踪”、“记忆”三种情况。DSP根据距离(“搜索”、“跟踪”、“记忆”)的工作状态,定时按数学规律给CPLD时计数值进行延时。先送一按伪随机序列码延时的计数值到16位比较寄存器,时间到后,开始发射导前封闭脉冲(6.5μs),复位计数频率10MHz的16位高速计数器(高速计数器的精度为±0.1μS,相当于距离±15米),同时将该信号经缓冲输出去封闭接收分机、视频通道及外部其它设备等;1.5μs后生成脉宽3μs的询问脉冲,第二个导前封闭脉冲同样生成第二询问脉冲,即询问脉冲对。当有外界封闭信号出现时,询问脉冲不发射输出,起到一保护作用。如正常,高速计数器即同时开始有效计数,将固定延时过后的500km路程中即3300μs时间均分为10μs间隔的区间,16位内存内的每一个字区间表示为1.5km的距离,将在这一3300μs时间内收到的所有随机脉冲按其收到的时间计数值存入内存,在“搜索”状态,设备每秒发射100对询问脉冲,按70%的概率计算,应能收到70对脉冲,即0.1s应收到7对脉冲,连续搜索0.1s,收到的回答脉冲在某相邻的二区间内可达到6~8对,而其它区间在0.1s内进入的总脉冲对数最坏情况下为370对,平均到每个区间仅为1.1对,远远小于距离回答脉冲在该区间出现的个数,转入“跟踪”状态后,设备每秒发25对询问脉冲,按70%概率计算,每秒应收到17.5对回答脉冲,如飞机相对于地面速率为±2km/s,则最差的情况时,连续有6对脉冲未收到,第7对脉冲收到时,飞机已飞越560m,相当于4μs时间,所以设定跟踪区间为±1km,足以满足动态范围需要,丢失信号即“记忆”后8s范围内,可按地速±2km/s逐步扩大搜索范围,而显示值则按原值加当时速率值继续输出,直到抓住新值。如4s时△t=±8km,8s时△t=±16km,在△t范围内的任何一点如连续收到3组脉冲,即可认定重新抓住了信号,可锁定后继续“跟踪”,否则过15s,即转入“搜索”,按原方法重新搜索信号。
在A/A-X状态,设备除发出询问脉冲并等待回答信号外还接收其它设备发出的询问脉冲,经译码识别确认后驱动总延时为T0=50μs固定延时电路延时后,形成3μs回答脉冲送至发射分机电路,当有外界封闭信号出现时,发射脉冲不输出,起到一保护作用。为保护发射分机不因发射脉冲太多而烧毁,应控制到发射分机的询问脉冲和回答脉冲发射数量,不超过600个。
4.硬件电路方案
本项目硬件电路部分主要是采用大容量的CPLD+DSP数字信号处理相结合,硬件电路设计主要包括信号预处理电路、CPLD电路、DSP处理电路等各部分电路之间的接口设计以及电源电路等部分。硬件电路为软件处理模块提供输入数据和处理资源,并在软件的统一协调下完成数字信号处理。硬件原理框图如图2所示。
5.结束语
提出了一种利用DSP和CPLD相结合的方式来完成塔康系统的测距、侧位功能,利用数字信号处理和可编程逻辑器件来合理分配所需完成的功能。使得设备可靠性增强、功能模块清晰。实际表明该方法有效可行。
[1]程慧莉,张洪戎.智能导航总体框架[J].北京航天航空大学.
[2]张忠兴.无线电导航原理[J].空军电讯工程学院.
[3]1993.9ICAO,AERONAUTICAL TELECOMMUNICATIONS ANNEX10.1990-11-15.