潜艇磁异常信号与方位对应关系的研究*
2012-07-11伍东凌
伍东凌 石 超 王 秀
(中国船舶重工集团公司第七一〇研究所 宜昌 443003)
1 引言
潜艇自诞生之日起,就以其隐蔽性能好、作战能力强、灵活性好等特点著称于世,使其成为现代战争中极具威胁的攻击手段之一,在现代海战中发挥着重要作用。而及时有效地发现敌方潜艇是建立反潜作战系统的先决条件之一,也是在战争中取得优势地位的关键所在。
随着潜艇降噪技术的发展,特别是具有水下高航速、高水平安静性以及极强续航能力核潜艇的出现,使得传统声学探潜方式遭遇了新的挑战,这就需要利用其他非声探测装备与声学探测装备配合使用、互相补充,以进一步提高反潜作战效能。由于潜艇外壳是由具有磁性的金属材料制成的,尽管对其进行过消磁处理,但也不可能彻底消除潜艇的磁性,而且潜艇本身长期处于地磁场这个大环境中,也将不可避免的被地磁场磁化而产生磁性,所以潜艇的存在必然会引起地磁场的异常。
当前国内外先进反潜飞机上装备的磁异探测仪,就是通过探测潜艇引起的磁异常信号来判断在其有效探测范围内有无潜艇等目标的存在,且高性能磁异探测仪有效探测距离已接近1000m,因此利用高性能磁异探测仪对潜艇等目标的真实方位作出快速准确的判别在实战中显得极为重要。
本文通过Matlab建模仿真,分析了反潜飞机在不同搜潜航向下,机载磁异探测仪探测到不同航向潜艇的磁异常信号特征。利用这些磁异常信号建立数据库,将反潜机在两条相互垂直的搜潜航线下探测到的磁异常信号与数据库中的磁异常信号进行对比,可较为准确的判别出目标潜艇的真实方位。
2 航空磁探搜潜战术简介
应召反潜是航空反潜最基本和最常用的一种活动方式,所谓应召反潜是指反潜机在机场、舰载机或指定空域待命,当获得敌潜艇的活动情况后,飞往发现潜艇的海域,搜索和攻击敌潜艇的战斗行动[1~2]。在到达目标海域后,反潜机首先利用一些搜索范围广、但定位精度低的设备(如声纳浮标、搜潜雷达)进行搜潜航行,发现可疑目标行踪后,再利用磁异探测仪进行定位精度较高的搜潜航行。
反潜机使用磁异探测仪搜潜时,常用的方法有:圆周探测法、平行探测法等[3]。
磁异探测仪探头安装在飞机尾部可外伸式短舱内的固定翼反潜机搜潜时一般采用圆周探测法,即以巡航速度飞向可能出现潜艇的位置点,若磁异探测器未显示磁异常信号则继续往前飞一段距离,仍无信号则转为以该位置点为圆心的圆周搜潜飞行,若磁异探测器显示水中可能有潜艇时,则投放标示该位置点的标志物,并使飞机转弯爬升至投放反潜武器的高度,以垂直航向穿越标志物,经证实为潜艇时则投放反潜武器。若圆周搜潜飞行时仍未发现潜艇则改为螺旋探测法,以扩大搜潜飞行范围。而装备拖曳式磁异探测仪的反潜直升机一般采用平行探测法,即将探头吊放至离水面合适高度,从不同方向平行跟踪,直到发现潜艇目标。
这两种磁异探测方法只能确定,在以探测飞机为球心,磁异探测仪的有效作用范围为半径的一个半球面范围内有潜艇目标存在,如能够进一步确定潜艇所在区域,将能有效提高反潜作战效能。
3 任意航线下探测潜艇磁异常信号的数学模型
众所周知,自然界的磁现象均可等效为若干个磁偶极子磁场的叠加,在特定情况下也可以等效为一个磁偶极子。在利用磁异常探测仪进行探潜时,美国海军就将潜艇的磁场近似为一个磁偶极子的磁场,且反潜飞机进行小视场磁异常探潜时,潜艇纵向磁场占主导[4~9]。因此,我们将潜艇磁场近似为一个磁偶极子的磁场,且其纵向磁矩远大于其他两个方向的磁矩。
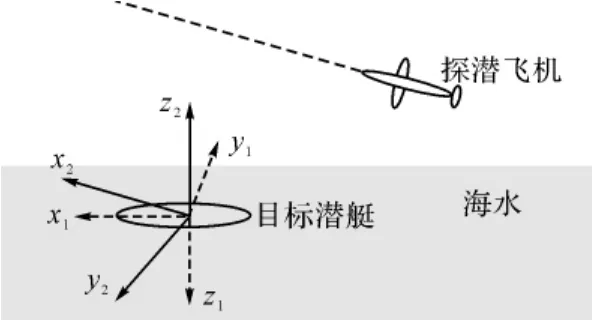
图1 潜艇磁矩坐标系和飞机飞行坐标系
建立潜艇磁矩坐标系和飞机飞行坐标系,如图1所示。假定这两个坐标系原点重合,潜艇磁矩坐标系中x1轴与潜艇纵轴方向平行,指向舰艏方向为正,y1轴与潜艇横轴平行,指向潜艇右侧为正,z1轴与平面x1Oy1垂直,向下方向为正,构成右手坐标系;飞机飞行坐标系中x2轴与飞机直线探测飞行方向重合,前进的方向为正,y2轴与x2轴垂直,指向左侧机翼为正,z2轴与平面x2Oy2垂直,向上方向为正,也构成一个右手坐标系。
假设反潜机在搜潜飞行时的磁航向角为α1,潜艇磁航向角为α2,潜艇在三轴方向上的磁矩分别为sx,sy,sz,由式(1)可知,利用旋转矩阵便可将潜艇磁矩变换成在飞行坐标系下三轴方向上的磁矩mx,my,mz。

则潜艇磁在距离其r远处(即飞机处)的磁感应强度为


可得潜艇磁在探潜飞机飞行坐标系三轴方向上产生的磁感应强度分别为[11]
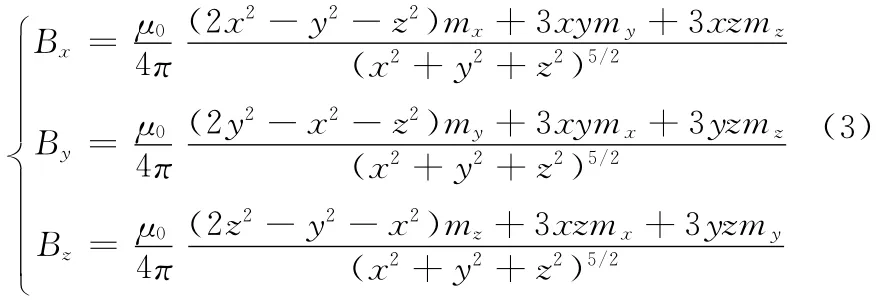
其中,x,y,z为飞行坐标系中飞机所处的方位坐标,即在飞行坐标系下飞机与潜艇在三轴上的距离。
反潜机上磁异探测仪探测到的磁异常信号除了潜艇产生的磁感应强度以外,还有地磁场以及飞机本身运动所引起的磁干扰。磁干扰可用软补偿的方式进行补偿,为使磁异探测仪直接输出目标潜艇磁异常信号,采用式(4)作为系统的输出。


由此,设定各个参数,利用Matlab可仿真产生探潜飞机在任意搜潜航向下对任意航向潜艇探测到的磁异常信号,利用仿真产生的磁异常信号建立一个数据库,用于与实时探测的磁异常信号进行对比。
4 对潜艇磁异常信号的仿真分析
根据以上建立的数学模型,假设潜艇三轴磁矩分别为Sx=1.5×104A·m2,Sy=3000A·m2,Sz=8000A·m2,当地地磁总场为51200nT,地磁倾角为47.1°。可仿真生成探潜飞机在任意航向下,对任意航向的潜艇所探测到的磁异常信号。
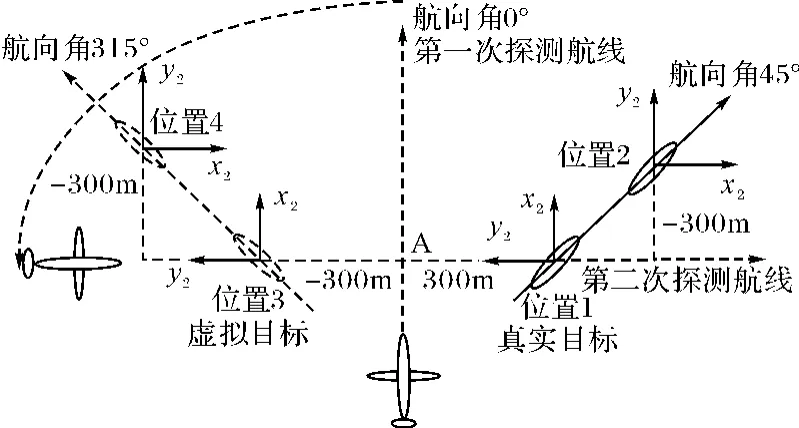
图2 探潜飞机搜潜示意图
假设探潜飞机在应召反潜中到达目标海域后进行如图2所示搜潜航行,当探潜飞机沿第一次探测航线搜潜航行时,根据飞行坐标系的定义,我们可知真实目标和虚拟目标的飞行坐标系如图2中的位置1和位置3处所示。当探潜飞机沿第二次探测航线搜潜航行时,我们可知真实目标和虚拟目标的飞行坐标系如图2中的位置2和位置4处所示。
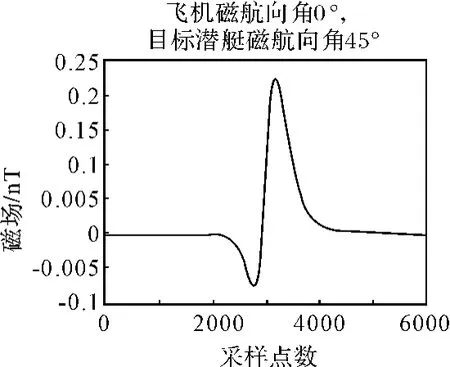
图3 沿第一次探测航线飞行时探测到的潜艇磁异常信号
进行中第一次探测航线方向(假设此时磁航向角为0°)搜潜航行,并探测到如图3所示目标潜艇磁异常信号。将此信号与数据库中探潜飞机磁航向角为0°时对任意航向潜艇探测的磁异常信号对比发现,此磁异常信号与图2中标示出的沿磁航向角45°方向航行的真实目标潜艇以及沿磁航向角315°方向航行的虚拟目标潜艇产生的磁异常信号相同。因此仅靠一次探测飞行并不能较为准确的确定目标潜艇方位。而此时真实目标潜艇与探潜飞机在飞行坐标系下的距离为y2=300m,z2=260m;虚拟目标潜艇与探潜飞机在飞行坐标系下的距离为y2=-300m,z2=260m。
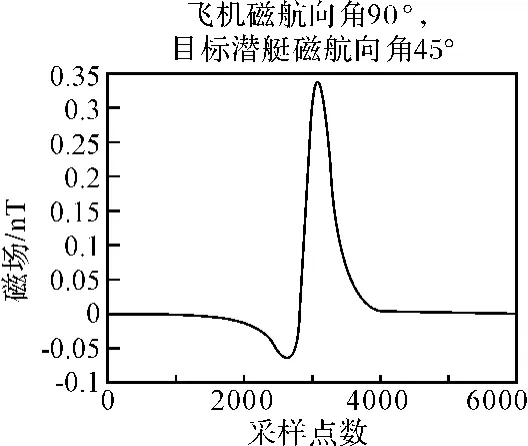
图4 沿第二次探测航线飞行时探测到的潜艇磁异常信号
如记录下磁异探测仪输出潜艇信号峰值时飞机所处位置的GPS信息,标记此位置为A点。在探测到本次潜艇磁异常信号后,飞机立即转向,沿航向角90°方向过A点垂直于第一航线(即图2中第二航线)作第二次探测飞行,必能探测到潜艇信号。为便于分析问题,假设飞机转向的这段时间,真实目标潜艇和虚拟目标潜艇航行至图2所示相应位置。探潜飞机沿第二次探测航线进行搜潜飞行时,磁异探测仪输出的磁异常信号如图4所示。
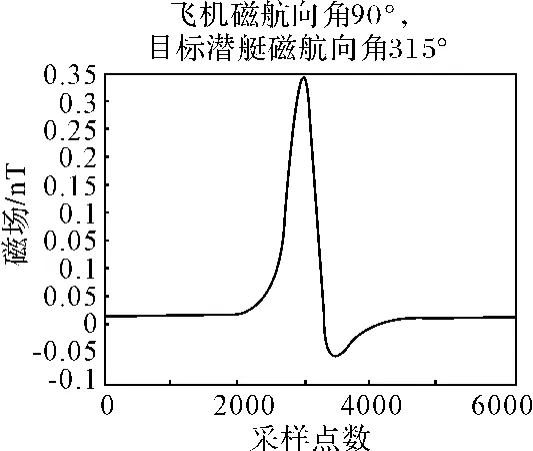
图5 沿第二次探测航线飞行时探测到的虚拟目标潜艇磁场信号
将此信号与数据库中探潜飞机磁航向角为90°时对任意航向潜艇探测的磁异常信号对比发现,其与图2中真实目标潜艇产生的磁异常信号相同,而此时对图2中虚拟目标潜艇,其产生的磁异常信号如图5所示,故可确定出真实目标潜艇所在的大致方位。由此分析可见,经过上述两个航次的搜潜航行,可进一步明确目标潜艇所处的方位。
由于探潜飞机在搜潜航行中实际的磁航向角是已知的,只要将实时探测到的磁异常信号与数据库中探潜飞机相同磁航向角下对任意航向潜艇探测的磁异常信号进行对比,通过上述两个航次的搜潜航行,便可对目标潜艇所处方位作出较为准确的判断。探潜飞机两次航线把可能存在潜艇的目标区域划分为4个象限,一般可判断出真实目标潜艇处于其中某一个象限之中,并能大致判断出目标潜艇当时的磁航向角。故采用此种航空磁探搜潜方法可较好的判别出目标潜艇的方位,有效提高反潜作战效能。
5 结语
本文通过matlab仿真生成了反潜机上在各个搜潜航向下,对目标潜艇各个航向下磁异探测器探测输出的磁场信号,并利用生成的磁异常信号建立一个数据库。通过仿真反潜机在两个相互垂直航次的搜潜航行过程中探测到目标潜艇磁异常信号,将探测到的磁异常信号与数据库中的磁异常信号进行实时对比,可快速判别出目标潜艇的方位,从而为后续对潜攻击提供了有利的先决条件。
[1]孙明太.航空反潜概论[M].北京:国防工业出版社,1998:342-344.
[2]吴芳,杨日杰.航空磁探仪应召搜潜效能研究[J].测试技术学报,2008,22(2):144-147.
[3]王祖典.航空反潜非声探设备[J].电光与控制,2006,13(4):6-8.
[4]王光辉,朱海,郭正东.潜艇磁偶极子近似距离条件分析[J].海军工程大学学报,2008,20(5):60-63.
[5]曲晓慧,杨日杰,单志超.潜艇磁场建模方法的分析与比较[J].舰船科学技术,2011,33(3):7-11.
[6]周国华,刘大明.基于逐步回归法的潜艇高空磁场仿真[J].海军工程大学学报,2005,17(5):82-85.
[7]周耀忠,宋武昌,唐申生.潜艇磁场外推的数学模型研究[J].海军工程大学学报,2003,15(4):31-35.
[8]王金根,龚沈光,刘胜道.磁性目标的高精度建模方法[J].海军工程大学学报,2001,13(3):49-52.
[9]张青杉,麻丰林,许丽云.航空三维磁梯度测量方案研究[J].地质与勘探,2010,46(6):1087-1091.
[10]赵建设,龚绪林.基于 HLA的潜艇指控战术训练系统研究[J].计算机与数字工程,2011(9).
[11]卢俊杰,陈正想,陈丽.一种磁梯度张量定位算法[J].磁学工程,2011,3(2):1-5.