潜水器布放回放系统发展现状
2012-07-11张浩立邓智勇罗友高
张浩立,邓智勇,罗友高
(武汉第二船舶设计研究所,湖北 武汉 430064)
潜水器布放回放系统发展现状
张浩立,邓智勇,罗友高
(武汉第二船舶设计研究所,湖北 武汉 430064)
布放回收系统是潜水器的重要配套装备,先进可靠的布放回收系统能直接提高潜水器海洋作业安全性和作业效率。本文简要分析了在潜水器布放回收系统设计中存在的缓冲保护、自动对接、风浪补偿及恒张力排缆等关键技术难点,并综述了当前国内外研制应用的几种典型潜水器布放回收系统。随着潜水器技术的飞速发展,其布放回收技术也将得到进一步的重视和发展。
潜水器;门形架;单臂式;集成式;滑道式,船舯月池;布放回收系统
0 引言
随着各国经济的飞速发展和世界人口的不断增加,为了生存和发展,人类越来越重视对海洋开发与利用,于是将目光集中到了潜水器身上,各式各样的潜水器得到了飞速发展。目前,潜水器可分为有缆遥控机器人(ROV)和无缆自治机器人(AUV)2种基本类型,主要用于深海打捞救生、水下军事侦察、海洋调查与勘察、电缆管线铺设及维护、水下定位考古等海洋作业。2010年7月,我国自主研制的“蛟龙号”载人潜水器深潜试验取得成功,标志着我国潜水器技术取得了跨越式发展。
21 世纪是海洋的世纪,潜水器是开发利用海洋必不可少的作业装备。潜水器作为水下设备,主要由潜水器本体、中继器、脐带缆、收放系统、控制系统及动力系统等部分组成,其作业能力很大程度上受到海域海况的影响,而海况的影响主要反映在其布放和回收过程中,安全、可靠、快速的布放和回收系统(简称收放系统),是潜水器适应海洋作业必备配套装备之一。
1 收放系统关键技术
随着潜水器技术的应用越来越广泛,其科技含量及制造成本越来越高,所配带的精密仪器越来越多,特别是水下载人机器人的发展应用,单一对其进行起吊和释放的模式已经不能满足使用要求。为了提高潜水器深海作业效率和作业安全性,方便各操作岗位之间的协同作业能力,防止机器人在收放过程中发生激烈摆荡或遭受撞击,越来越多的先进技术在潜水器收放系统上得到了应用和发展。
1.1 收放系统总体技术方案
潜水器在海洋作业时,除了其机器人本体以外,还常常配有脐带缆、控制系统、动力系统等组成设备搭载在母船上,因此在设计潜水器收放系统时,须充分考虑其所有组成设备的结构特点和功能原理,运用集成化设计思想,确保所有设备布置紧凑合理,方便安装固定,增强各操作岗位之间的协同能力,提高潜水器的作业安全性和作业效率[1]。
1.2 机械式自动释放回收技术
当潜水器下水作业时,需要通过收放系统将其吊放到水面进行释放;当完成深海作业升至水面后,收放系统必须能与机器人进行对接,并回收至母船上。在上述过程中,要求收放系统有1套专用释放回收装置,针对潜水器自身结构特点,尽可能设计1套可靠性和作业效率更高的纯机械式自动释放回收装置,使装置与机器人自动释放、对接,避免依靠潜水员下水辅助作业的传统且相对较危险的模式。
1.3 缓冲对接保护技术
在收放潜水器的过程中,由于搭载母船纵横摇晃的影响,使得被联接在收放系统吊臂上的机器人发生摆荡,甚至会与船体或吊臂发生碰撞,对设备和人员的安全构成威胁。因此,有必要在收放系统吊臂顶部设计一种专用带缓冲保护功能的对接装置,要求该装置能自动停止起吊钢缆绞车运行,能通过缓冲阻尼器施加反力固定住潜水器,能控制潜水器在吊臂摆动过程中始终保持同一朝向,避免需要操作人员辅助控制机器人摆荡。
1.4 风浪补偿技术
系统在进行潜水器收放作业时,由于海面波浪起伏的作用,机器人和母船均会以各自不同的周期随波浪做升沉运动,特别是在机器人入水和出水过程中,极有可能导致母船和机器人随波浪朝相反方向做升沉运动,使起吊钢缆交替循环地由松弛状态突然变成张紧状态,从而产生较大的冲击,对钢缆或对接装置造成损坏,严重影响设备和人员安全。因此,需要在液压系统中加入风浪补偿环节,对钢缆进行恒张力控制,即当钢缆松弛时,主动拉紧钢缆;当钢缆突然张紧时,主动释放钢缆,缓解钢缆及受力构件所受的冲击,以提高潜水器收放系统的可靠性、安全性和使用寿命[2]。
2 典型收放系统
我国早在20世纪70年代就开始了潜水器布放回收系统的研究工作,随着潜水器技术和成本不断提高,人们对其收放作业效率、作业安全性、作业协同性的要求也越来越高,因此各式各样的潜水器收放系统得到了飞速发展和广泛应用。下面列举几种典型的收放系统模式。
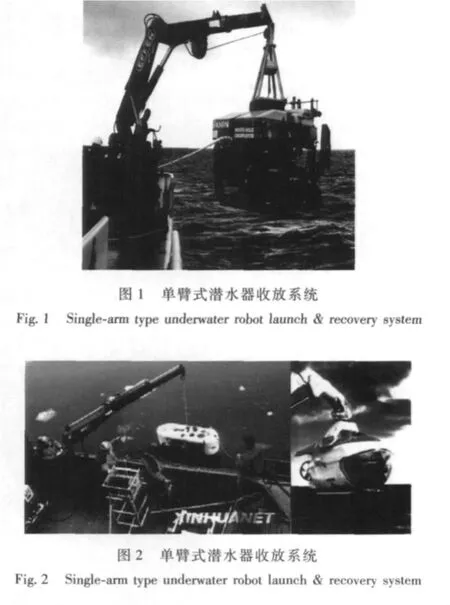
2.1 单臂收放系统
单臂收放系统是最简易的一种潜水器收放系统,可针对潜水器的结构特征设计专用起吊臂,也可直接利用母船上已有的克令吊作为吊臂。该形式收放系统结构简单,成本较低,且占用母船空间少,目前广泛应用于各类中小型潜水器收放作业(见图1和图2所示)。但单臂收放系统功能单一,只能单纯对潜水器进行起吊和释放,作业时需要操作人员进行配合保护机器人的安全。
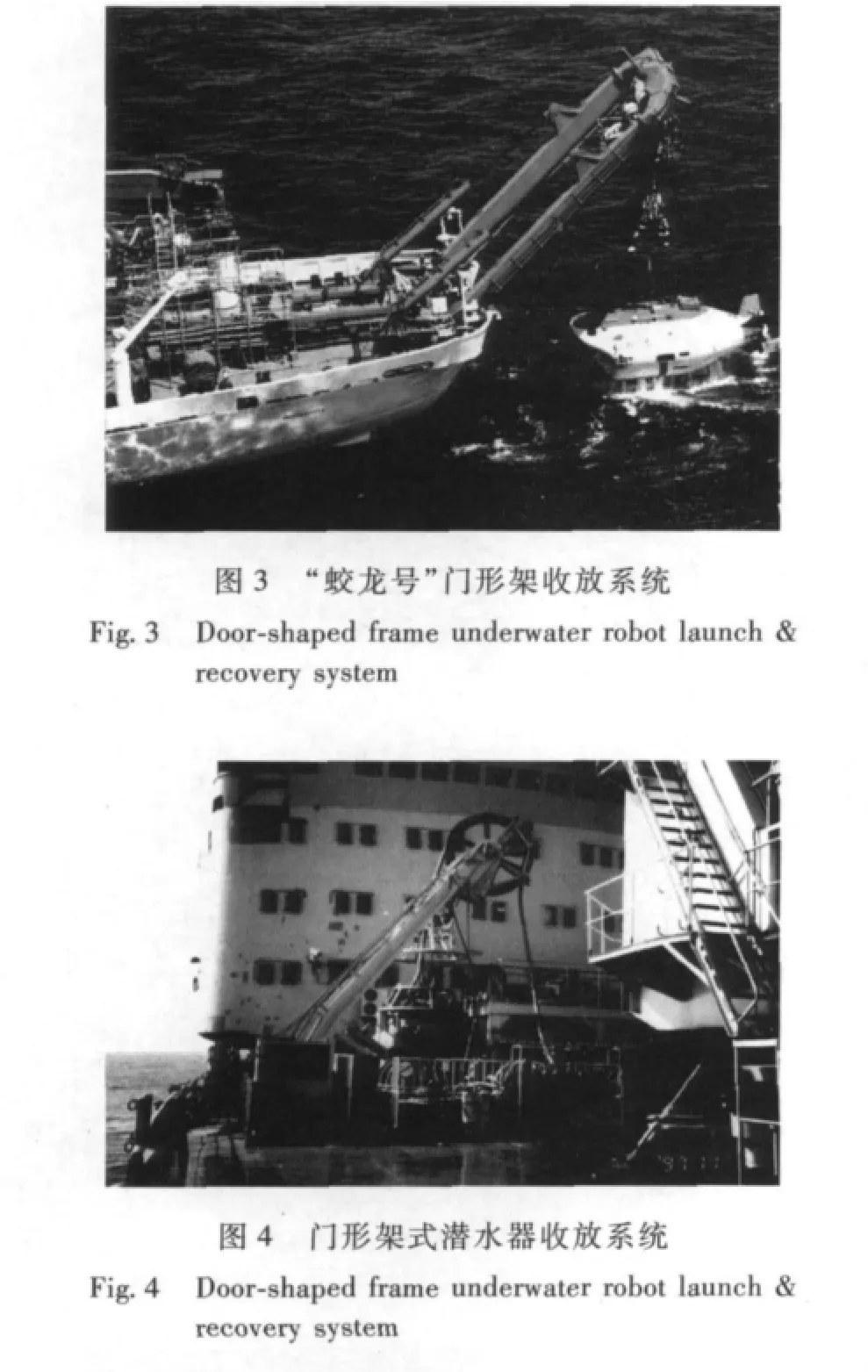
2.2 门形架收放系统
门形架式收放系统是最具代表性的潜水器收放系统。该系统技术较成熟,可广泛用于各种类型潜水器收放作业。通常情况下,系统主要由门形架、缓冲对接保护装置、释放回收装置、钢缆绞车、液压系统、操作控制系统等部分组成。该系统具有结构合理、结构强度高、可靠性高、操作简便等优点,可安装在母船尾部(如图3所示),也可安装在母船舷侧(如图4所示)。门形架收放系统还具有通用性,不仅可用于收放潜水器,还可用于其他水下作业设备的收放[4]。
2.3 集成式收放系统
针对小型有缆潜水器(ROV)配套设备多、存放分散等特点,设计了一种新型的集成式收放系统,有效解决了潜水器系统的运输、吊装、存放、机器人的自动释放回收、机器人的缓冲对接保护、脐带缆的恒张力保护及自动收放排缆等问题。集成式收放系统可存放在陆上车间内,待需要海洋作业时可临时整体吊装到搭载母船甲板上,避免了纯门架式收放系统对母船的永久依赖性。且该系统运用集成化设计思想,充分考虑人性化操作要求,各组成设备布置紧凑合理,结构强度安全可靠,整体安装运输方便[1]。
新型集成式潜水器收放系统主要由集成结构平台、控制间、门架及变幅油缸、钢缆绞车、机器人机械式自动释放回收装置、全回转式缓冲对接保护装置、脐带缆恒张力自动收放及排缆装置、液压系统及控制系统等部分组成,见图5和图6所示。该系统设计了1套全自动、纯机械式释放对接装置,利用磨擦角度的变化对滑移力大小的控制,设计出双锥面结构形式的释放轴环,可靠实现了对潜水器的自动释放与对接;巧妙采用两半式对称结构使装置能适用于不同设备,且安装使用方便,动作灵活可靠[5]。且设计了1套新型恒张力收放及自动排缆的脐带缆绞车装置,利用两端带锥度的压紧轮结构,保证脐带缆在卷筒上自动换向及整齐排布,结构简单可靠,适合于大长度、多层级脐带缆的自动排缆;通过控制磁粉耦合力,实现了小载荷、高精度、多级的脐带缆恒张力保护[6]。巧妙利用潜水器结构形式,设计了一种全回转式缓冲对接保护装置,可保证机器人在门架运动过程中,实现任意角度下的自动导向对接,且通过阻尼缓冲反力卡紧机器人本体,防止其在波浪影响下摆荡,有效避免探测器与其他设备发生碰撞。
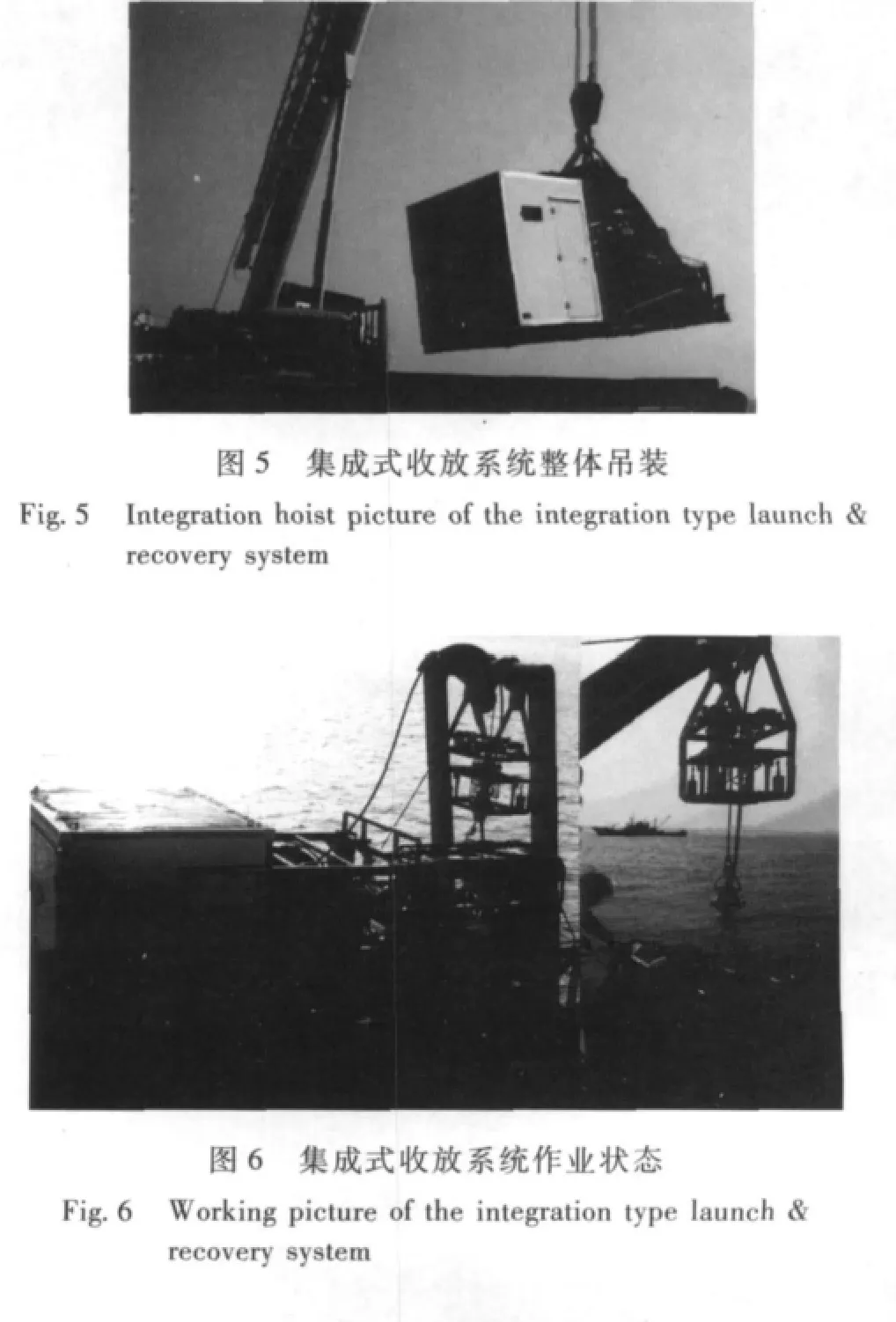
该系统已成功完成了多次海洋作业任务,其总体设计合理、性能稳定可靠、集成化程度高、操作维护方便,且能临时在母船上安装,极大地提高了潜水器布放和回收时的作业效率和作业安全性。该系统的集成化思想还可广泛应用于各种海洋作业装备的布放回收作业。
2.4 滑道式收放系统
滑道式收放系统主要应用于需要连续释放多个设备的水下作业机器人收放作业,例如有一种水下测量机器人的水下部分,由脐带缆、测量机器人、中间缆及压载铅等部分依次连接组成,且脐带缆在释放的同时还要间隔一定距离绑定浮球,如果采用吊放的形式进行布放回收,则操作极其不便,且易损坏设备,因此需要设计一种专用滑道式收放系统。该系统主要由集成平台、脐带缆绞车、线阵转盘、液压系统、操作平台、移动滑道、控制系统等部分组成,如图7和图8所示。
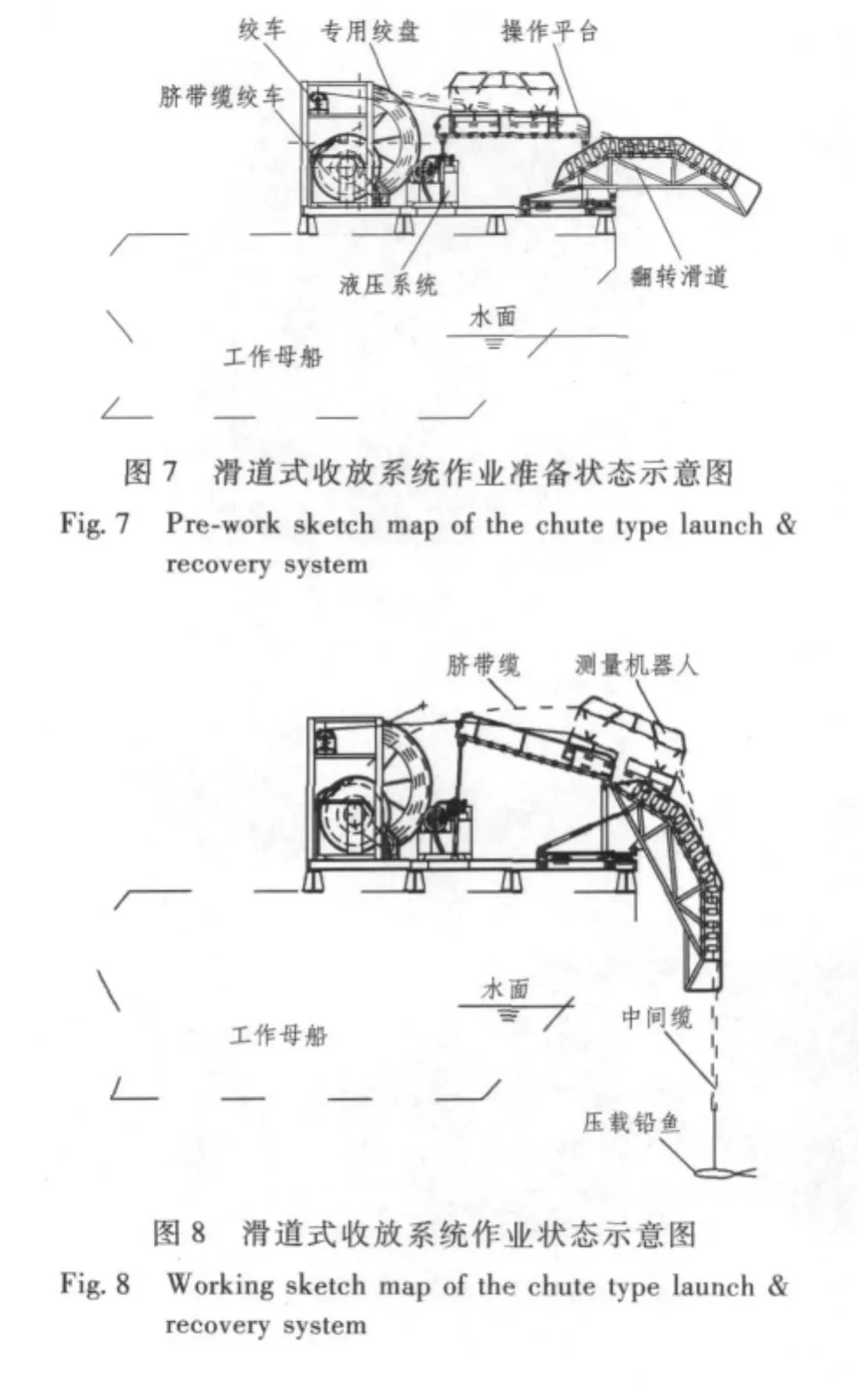
该收放系统在准备作业前,可将测量机器人放在操作平台上,压载铅鱼放在翻转滑道水平段上,将铅鱼与中间缆阵连接(见图7);在布放作业时,翻转滑道翻转至垂直状态,中间缆另一端通过1根系缆绳连接。当中间缆在铅鱼重力作用下放出后,再将其与测量机器人连接,并解开系缆绳,再将操作平台翻至倾斜状态布放测量机器人(见图8),利用其自身重力作用,依次沿滑道滑入水中;回收作业时,在绞车拉动力下,各设备沿滑道依次回收至母船上。
针对各种特殊潜水器的结构形式,有图9所示的2种滑道式释放系统。这种系统针对性太强,主要用于机器人的布放作业。
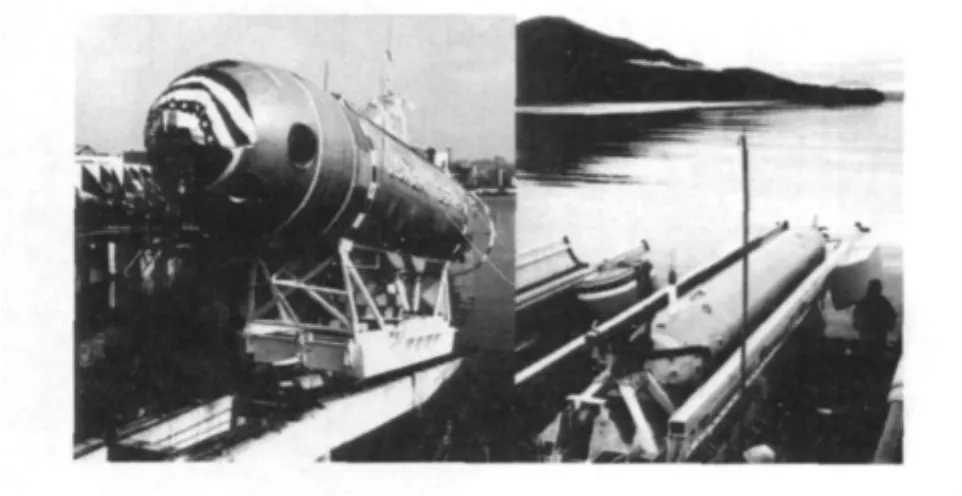
图9 特殊滑道式收放系统Fig.9 Special chute type launch&recovery system
2.5 船舯月池式收放系统
船舯月池式收放系统是在船体中部对潜水器进行释放回收作业。该形式系统需要安装在专用母船上,制造成本高,潜水器通过母船上吊臂吊至船舯月池上方,可直接从中央月池内吊放入水中(见图10左侧),也可根据机器人的结构形式,在船舯月池内设置垂直轨道,机器人沿轨道直接滑入水中(见图10右侧),该轨道式船舯月池收放系统在布放时可有效保护潜水器安全。
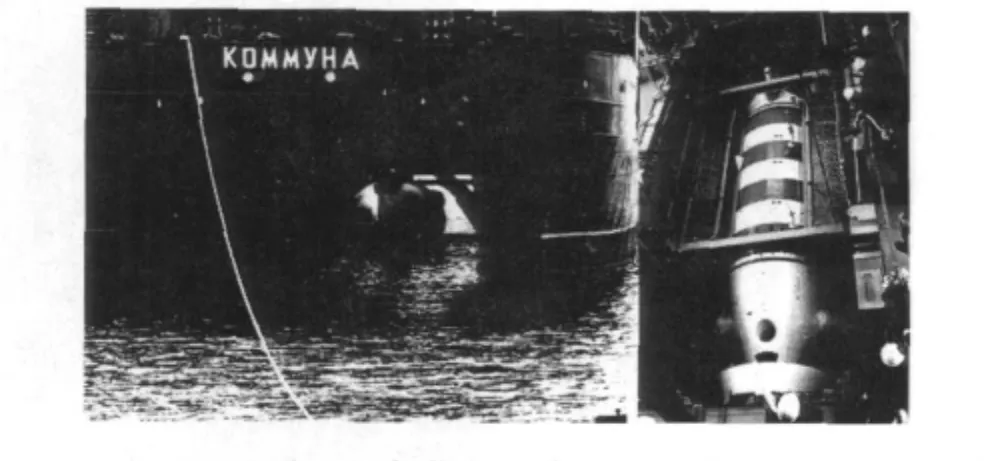
图10 船舯月池式收放系统Fig.10 Midship moon-pool launch and recovery system
3 结语
收放系统作为潜水器的重要配套装备,对潜水器海洋作业效率起着至关重要的作用。随着开发利用海洋进程的加速,潜水器技术得到了飞速发展,各式各样的潜水器不断出现,因此潜水器收放系统的需求也迅速增加,这也为潜水器收放技术的不断发展提供了机遇和挑战。
通过对当前国内外几种典型收放系统的介绍,对各型潜水器的布放与回收具有广泛的参考意义,也可进一步推广应用于其他海洋水下作业装备的布放与回收。
[1]张浩立,邓智勇.一种新型集成式潜水器吊放回收系统的研制[J].舰船科学技术,2010,32(7):117 -120.
ZHANG Hao-li,DENG Zhi-yong.The design of a new integration submarine lift-recovery system[J].Ship Science and Technology,2010,32(7):117 -120.
[2]胡火焰,邓智勇,张浩立.潜水器吊放回收装置液压系统设计[J].液压与气动,2009,(8):57-59.
HU Huo-yan,DENG Zhi-yong,ZHANG Hao-li.The design of hydraulic system for submarine lift-recovery equipment[J].Chinese Hydraulic & Pneumatics,2009,(8):57 -59.
[3]邓智勇,曾钕钋,张浩立.一种新型张力保护自动收放脐带缆绞车装置[J].海洋工程,2010,28(3):107 -111.
DENG Zhi-yong,ZENG Nv-po,ZHANG Hao-li.A new type of automatic retractable and tensile protective cord cable winch[J].The Ocean Engineering,2010,28(3):107 -111.
[4]刘相春.A形架式潜水器收放系统设计研究[J].船舶,2007,(5):52 -57.
LIU Xiang-chun.Design of A-frame submarine launch &recovery system[J].Ship & Boat,2007,(5):52 -57.
[5]邓智勇,张浩立,等.机械式自动对接释放装置[P].中国专利:ZL200910061102.3,2009-03-13.
DENG Zhi-yong,ZHANG Hao-li,et al.Mechanism auto connect-release device [P]. China Patent:ZL200910061102.3,2009 -03 -13.
[6]张浩立,邓智勇,等.恒张力自动收放和排缆的脐带缆绞车装置[P].中国专利:ZL200920085244.9,2009-04-24.
ZHANG Hao-li,DENG Zhi-yong,et al.Invariable tension auto gather-release and arrange-cable cord cable winch device[P].China Patent:ZL200920085244.9,2009 -04 -24.
Development actuality of submarine launch and recovery system
ZHANG Hao-li,DENG Zhi-yong,LUO You-gao
(Wuhan Second Ship Design and Research Institute,Wuhan 430064,China)
The launch and recovery system is an important accessory equipment of the submarine.Advanced and reliable launch and recovery system can directly improve the marine operations safety and efficiency of the underwater robot.This paper brief analyzes the key technologies of the buffer protection,automatic connecting,wind compensation,and the constant tension cable arrange on designning the submarine launch and recovery system,and summarizes several different typical submarine launch and recovery system.With the rapid development of submarine,its launch and recovery technology will also be further attention and development.
submarine;door-shaped frame;single-arm type;integration type;chute type;midship moon-pool;launch and recovery system
U674.76
A
1672-7649(2012)04-0003-04
10.3404/j.issn.1672-7649.2012.04.001
2011-06-23;
2011-08-02
张浩立(1980-),男,硕士研究生,工程师,研究方向为机械制造及其自动化。
