基于人机交互的微小型侦查式爬壁机器人的外观设计研究
2012-07-10霍昕
霍 昕
(天津职业技术师范大学,天津 300222)
微小型武器是美国等先进工业国家于20世纪90年代开始发展的新概念武器,它对21世纪战争的模式将会带来变革性的影响。机器人这一前沿技术自然是微小型武器发展的重点所在。小型移动机器人具有在高度受约束环境中秘密行动的功能,因而非常适合于军事应用。
1 微小型侦查式爬壁机器人研究概况
目前,针对日益猖獗的恐怖主义和暴力犯罪行为,利用侦查式机器人技术提升部队战斗力并保障相关人员安全已成为国内外相关研究领域共同关注的焦点问题。在处理恐怖事件,遭受袭击后产生的核、生、化等灾害时,经常会遇到情况不明、人员无法接近或高度危险的区域。此时,爬壁机器人可以被投放到侦查区域,在室外的壁面或玻璃上吸附,用自带的侦察设备侦察不明情况或者难以进入的复杂场合,查明现场情况,并将信息传送回总控系统,供指挥人员做出及时有效的决策。同时,微小型爬壁机器人还具有极强的隐蔽性能和一定的杀伤能力,可以携带爆破物并在适当的时候自爆,破坏敌方通讯设施,大大减少人员伤亡,提高安全保障性能,并增强了工作效率。
鉴于微小型武器技术的重大意义,从上世纪90年代开始,美、英等国家就竞相开发相关的机器人技术。一方面,从反恐战场的实际需要出发,研制出应对不同危险环境的核生化侦察和防恐、防爆遥控机器人系统;另一方面,又针对可能遇到的城市巷战的问题,研制出能够覆盖地面、建筑作业面及空中作业全方位的侦查式机器人系统,使其分别从事侦察、防爆、取样、检测、搜救等任务。

图2 侦查式机器人全方位系统
与国外相比,我国在机器人研究方面起步较晚,为了应对全球化的反恐形势,我国也开展了“反恐排爆机器人测试评估与培训关键技术研究”和“微小型移动侦察机器人”等研究项目。包括清华大学、中国科学研究院、华南理工大学、哈尔滨工业大学在内的多家研究机构也开展了一系列反恐侦察爬壁机器人研究。
2 微小型侦查式爬壁机器人的人机交互模式
(1)使用人群心理分析及使用环境分析。在实际的反恐环境中,可能存在着敌情复杂、突变、隐蔽、破坏性强等特点。反恐人员必须是具有过硬的应付复杂情况的技术素质的军事人才。但在特定的环境下,反恐人员也可能无法顺利完成任务。在面临突发事件时,反恐人员心理压力超负荷,自身安全也没有保障。以反楼宇内人质劫持为例,犯罪分子隐藏在房间里,外面的反恐人员很难了解到房间内部的情况。这时,反恐人员可以为反恐爬壁机器人配备侦查设备,利用遥控装置控制其悄无声息地沿壁面爬到便于侦查的位置。爬壁机器人把用摄像机拍摄到的房间内部的图像,通过无线传输装置实时传到几百米外的移动基站,为反恐人员判断形势、做出决断提供现场依据。爬壁机器人还可同时携带武器模块,在危急时进行攻击。作为军事用途,要求具有很强的隐蔽性能,所以也应考虑这方面的因素。比如色彩的选用首先必须考虑它的隐蔽性。
(2)操作心理分析。小型爬壁机器人的功能主要是用于侦察,所以它必须拥有移动方便的红外摄像机以及先进的无线传输装置和优化的控制系统。当前影响机器人军事应用的瓶颈主要就是智能控制。智能控制方面,现在的机器人是无法替代人的,它们在结构、环境,突发事件处理等方面都无法像人一样随机应变,在对事物的感知、识别和判断等方面,都还有人为的因素在内。机器人只适合在“结构化环境”下根据原先的程序规划完成既定的任务。从技术的本质来说,现在的机器人基本上还是预先编程的,人工智能的实现具有极强的挑战性。以往的机器人也因此缺乏亲和力,甚至繁复的操作控制会给操作带来疲惫感。有的甚至没有很好的考虑到人机工程学原理,使得使用者的操作变得不易识别或是容易混淆。在操作方面无法实现人—机—环境的协调。
3 微小型侦查式爬壁机器人的造型方法
(1)微小型侦查式爬壁机器人的结构设计。侦查式爬壁机器人系统通常包括三个主要部分:真空吸附式爬壁机器人,便携式遥控器和无线视频传输模块。现在国内的移动式爬壁式机器人实验多采用真空吸附式设计方案,包括机械本体、DSP控制器、气动单元、电源和各种内外部传感器件。通过遥控加自主的控制方式,机器人可以在光滑壁面上爬行移动,并能实现在两个不同倾斜平面间跨越。便携式控制器则是一个小型的射频遥控系统,通过对控制指令的RF编码、传输和解码,操作者可以在一定距离内对爬壁机器人的运动进行无线控制。无线视频模块实现了对现场情况的侦察,并能够将动态图像实时地传输给操作者和远端的指挥中心,为决策者提供参考信息。
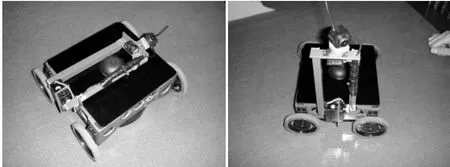
图1 侦察式爬壁机器人结构展示
由于机器人发展趋势向高智能化发展,爬壁机器人的设计除了要保证其基本性能外,还需增加附加功能如打击、导航、援助、红外探测、激光指示、对讲等功能。由此可见,现有爬壁机器人设计多为技术革新,没有考虑到使用者心理、使用环境的诸多人机因素。就机构本身而言,没有很好的保护意识,当机构处于危险状态时,没有隐蔽的外形,易被敌人发现。同时当机构遇到不可预测的故障时,比如在墙壁条件和温度条件不合适的情况下,爬壁机器人会从墙壁高处坠落。
(2)微小型侦查式爬壁机器人的外观设计研究。爬壁机器人由于微小型爬壁机器人多用于侦察和爆炸物排除,地震废墟中的受难者搜索和救援等。这些场合不仅对于机器人的性能提出较高要求,同时在造型上也应考虑相应的设计要求。微小型侦查式爬壁机器人要求体积小、重量轻、方便进入侦察地点,并能够迅速投入使用。
在造型材料方面,应尽量选用坚固而轻薄的材料,相较于金属存在质量较重的问题,选取玻璃纤维增强塑料(亦称作玻璃钢)等高性能材料作为外部造型的材料更为适宜,同时加工成型也更为方便。在造型结构方面,应尽量配合内部性能进行设计。在上表面增加活动式开口,方便摄像头进行伸缩侦查。保证外部结构不影响机构的壁面吸附性能。在造型色彩方面,应该突出机器人的隐蔽性能,使犯罪分子不易察觉。对于使用者有直接接触和互动的产品来说,其部件的尺寸与形状应该被逻辑地组织在一起,以便于认定、接触、抓握和操控。小型爬壁机器人在爬行中的各种因素的局限性要求设计造型简洁,尽量避免由于繁复的设计导致的重量较重、功能不易识别等问题。
4 结语
微小型侦查式爬壁机器人的研究,除了提高侦察、探测、救援、安全维护等需求的智能化以外,还应考虑到在危险环境中人机交互模式的重要性。研究“人——机器”交互方法,能够使机器人外部造型携带方便、操作灵活,隐蔽性能良好。同时鉴于对人机交互模式的考量,也可使操作人员在侦察现场时,临场感效果好,更好地应对和处理突发事件、加快事故处理速度、降低事故造成的财产损失,缩小机构损伤,保证人员安全。基于人机交互模式的外观探索性设计和研究对现代防空反恐军事发展具有重要意义。
[1]朱序璋.人机工程学(第2版)[M].西安:西安电子科技大学出版社,2006.
[2]陈恳,杨向东.机器人技术与应用[M].北京:清华大学出版社,2006.
[3]刘淑霞,王炎.爬壁机器人技术的应用[J].机器人,1999,(2).
[4]唐鸿儒,宋爱国.危险环境侦察机器人的研究进展[J].机器人技术与应用,2007,(5).
