带增程器的纯电动汽车整车控制器设计①
2012-07-09钱多年
钱多年
(同济大学中德学院,上海200127)
伴随着日益严重的大气污染和能源危机,传统交通工具—汽车的可持续发展面临越来越严峻的形势.研发电动车作为解决上述问题的有效途径,得到了越来越广泛的认可[1].
但由于目前蓄电池储能有限,纯电动汽车存在一次充电后续驶里程短的问题.笔者考虑采用在纯电动汽车上加装一个增程器的方法来增加纯电动汽车的续驶里程.
增程器是为了增加纯电动汽车行驶里程而加装在纯电动汽车上的一个附加储能部件.通常用户可以在出行时根据行驶里程需求确认是否安装[2].本文设计的电动车所使用的增程器是燃料电池.
整车控制器的基本功能对驾驶员的一些操作指令及传感器信号进行数据采集,根据车辆运行状况,控制电机、电池、增程器及外围执行机构安全、稳定、科学的工作.
1 整车控制器功能定义
1.1 整车控制器功能介绍
整车控制器VMS的控制对象为整个动力系统,主要包括电机、动力蓄电池、增程器和仪表.并在各部件控制器(如电机控制器MC、动力蓄电池控制器BMS、增程器控制器等)的配合下完成包括能量管理、故障诊断等.
整车控制器VMS通过与其他各控制器之间的CAN网络接口实现分布式现场总线控制.
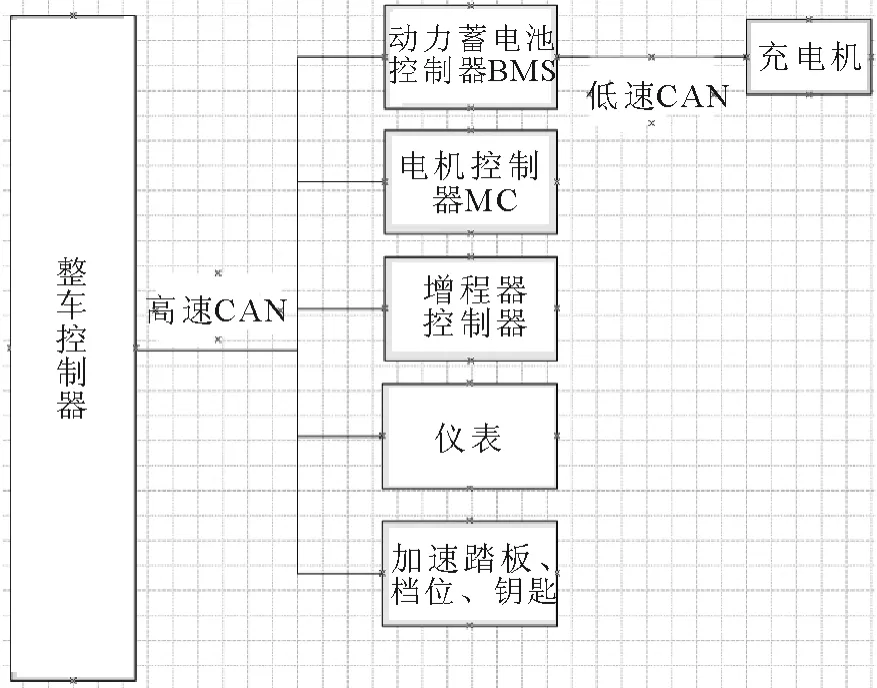
图1 CAN总线网络
1.2 能量管理和驾驶控制功能
能量管理和驾驶控制功能是整车控制策略的核心部分.
通过加速踏板的位置信息,识别驾驶员的驾驶意图,并且通过整车控制器设置的驱动控制算法,输出电机控制器调速电压,控制电机的转速.
由于带增程器的电动车有两个能量源,分别是动力蓄电池和燃料电池.所以需要通过整车控制器协调两个能量源.

图2 不同工况不同SOC门限值下续航里程
1.3 故障诊断功能
当动力系统各部件控制器(如增程器、BMS、充电机控制器等)监测到该部件性能参数超出控制范围,通过CAN网络将该故障传输给整车控制器.根据实测数据偏离门限值的多少,故障分为三级.
当一级故障发生时,整车控制器控制整车停车并切断动力电.当二级故障发生时,整车控制器关闭相应部件.当三级故障发生时,整车控制器将该故障显示到仪表,起到警示作用.

图3 整车控制器电气原理图
2 整车控制策略
本论文设计的带增程器电动车整车控制策略包括两部分:驾驶控制策略和能量管理策略.
2.1 驾驶控制策略
整车控制器在接受到加速踏板位置信号、档位信号和钥匙信号,即驾驶员驾驶意图后,根据加速踏板从零到最大开度和电机从零到最大转速正比的对应关系,输出电机控制器调速电压,控制电机目标转速.而通过档位信号控制电机正反转.
同时考虑到动力蓄电池SOC余量,当电池SOC余量低于0.25时,对电机的目标转速要求减半.

图4 MPC555芯片的接口定义
2.2 能量管理策略
对于拥有两个能量源的电动车,能量管理策略是整车控制策略中最重要的一环.
目前研究较多的能量管理策略主要有三种,第一种是逻辑门限控制策略[3];第二种是自适应控制策略[4];第三种是基于模糊逻辑或神经网络的只能控制策略[5].
本文采用逻辑门限控制策略,而评价指标包括三部分:蓄电池充放电经济性,动力性和能否体现增程器概念.当电池SOC低于门限值后,燃料电池以恒功率2kW开始工作,起到增程器的作用.由于燃料电池工作时,一部分功率提供汽车克服行驶阻力,剩余的功率还能给动力蓄电池充电,所以在选择启动燃料电池对应的动力蓄电池SOC门限值时,要考虑到电池充放电的经济性.使电池在充放电效率最高的区域工作.
本文使用Matlab的插件Advisor 2002,通过带增程器的电动车在SOC门限值分别为0.3,0.4,0.5和0.8时启动燃料电池,仿真燃料电池从开启到氢气耗尽行驶里程加上燃料电池充电电能提供车辆纯电动行驶的里程,以此为指标评价充放电经济性.
选择较符合电动车工作的工况,包括:20km/h和30km/h的等速巡航工况,公交车工况(CYC_NewYorkBus)和城市中心工况(CYC_NYCC).
图2所示为在不同工况,不同SOC门限值下,电动车的续航里程.可以发现,当动力蓄电池SOC下降到0.3-0.4时,启动燃料电池,可以得到最好的经济性能.
然后考量动力性.为保证车辆在开启燃料电池后,电动车仍有足够的能量保证动力性的需求,设计电动车以10km/h的车速连续爬15%坡度的工况.计算电动车在不同SOC门限值下开启燃料电池直到动力蓄电池电能耗尽(动力蓄电池SOC低于0.2),所行使的距离.以SOC门限值0.4为例.
首先计算爬坡所需电机功率.

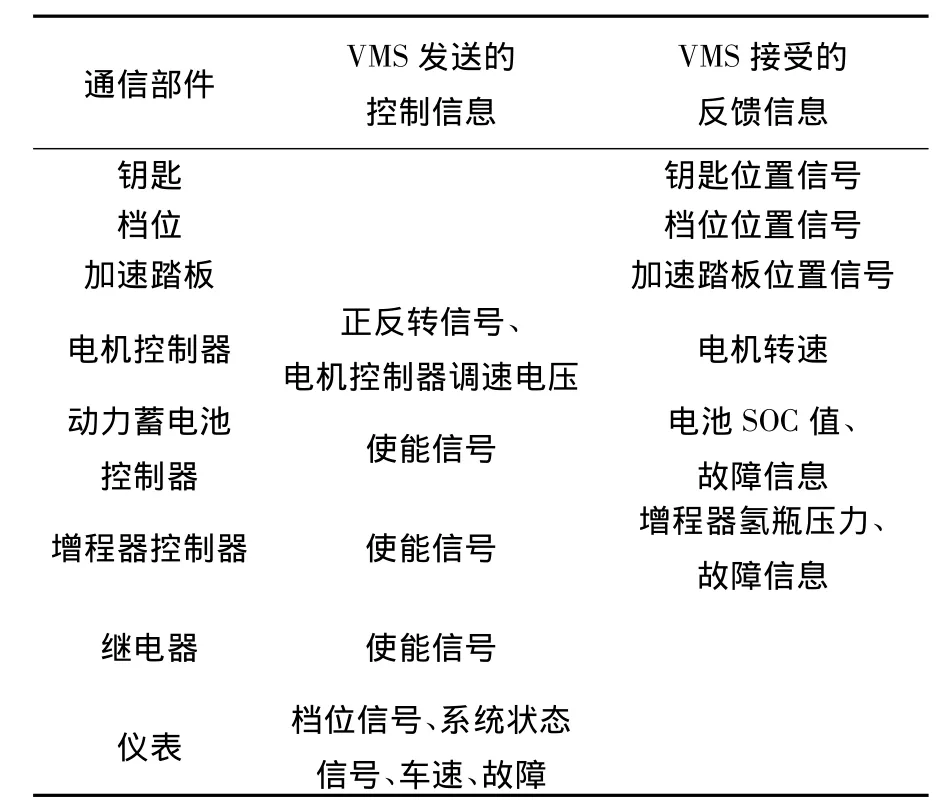
表1 整车控制器(VMS)功能定义
由于爬坡所需功率大于燃料电池提供的功率,此时动力蓄电池和燃料电池同时输出电能提供给爬坡所需的功率.已知动力蓄电池额定电压128V,额定容量40Ah.以SOC门限值0.4为例,可以计算出从燃料电池开启直到动力蓄电池电能耗尽爬坡的距离.

表2所示为在不同SOC门限值下从燃料电池开启直到动力蓄电池电能耗尽爬坡的距离.随着SOC门限值下降,电动车动力性能变弱.同时考虑到增程器的概念,需要在动力蓄电池电量尽量低的情况下再开启增程器,所以选择当动力蓄电池SOC降到0.4时开启燃料电池.

表2 爬坡里程
3 硬件设计及软件开发
3.1 硬件设计
文本使用MPC555芯片作为整车控制器的硬件平台.MPC555微控制器是一款高性能高速32位单片机,片内含有64位的浮点单元,448KB的Flash ROM、26KB的 SRAM和6KB的 TPU专用RAM、4KB专用ROM.
整车控制器的输入输出数据,可以通过两种途径和外围机构联系.一种是通过CAN通讯,另一种通过MPC555的A/D、D/A和I/O口,输出输入模拟量和开关量.图3和图4所示为整车控制器电气原理图和MPC555芯片的接口定义.
3.2 软件开发
整车控制器的软件部分主要是获取CAN通讯及硬件接口的输入数据后,通过能量管理、驾驶控制以及故障诊断的控制及计算,输出开关量及模拟量给各个部件控制器.
运用Matlab/Simulink及其子模块Stateflow建立控制模型,利用RTW首先对Simulink模块方图以ASCII码的形式存储在model.rtw的模型中间描述文件.然后由目标语言编译器(TLC)生成代码:包括系统目标文件、模块目标文件、目标语言编译器函数库.生成自定义的联编文件,即model.mk.程序创建过程将调用联编实用程序,而该程序对编译器程序进行调用,生成机器码,通过CANape和MPC555的CAN标定线下载到芯片.
3.3 整车调试和标定
整车调试包括弱电调试和强电调试两部分.弱电调试涉及整车控制器、动力蓄电池控制器、增程器控制器、电机控制器、仪表及档位、钥匙位置等部分.
当整车弱电调试完毕,确定各控制器及部件能在钥匙于1位置,整车低压上电以后,通过CAN通信实现控制电路续电器和各控制器开闭.开始高压上电,接通电机和燃料电池.同时标定油门踏板开度和电机转速之间的对应关系,并证实整车控制器设定的能量管理控制功能,根据动力蓄电池SOC的数值自动控制燃料电池的开闭.
最后在试车场进行路试,验证车辆是否达到设计预期的动力性和续航里程的指标.
4 总结
本文介绍了增程器这个在国内比较先进的概念,同时定义了带增程器电动车使用的整车控制器的功能.最后介绍了整车控制器及其控制策略的设计流程.希望给电动车控制系统设计与控制起到一定的借鉴作用.
[1] Shimizu H,et al.J,Bland C.Advanced Concepts in Electric Vehicle Design[J].IEEE Trans.On Industrial Electronics,1997,44(1):14-18.
[2] 尤寅,宋珂,尹东晓.带Range-Extender纯电动汽车动力系统设计[J].北京汽车,2010,21(3):70-74.
[3] Kimura A,et al.Drive Force Control of a Parallel- series Hybrid System.JSAE Review,1999,20(3):337-341.
[4] Johnson V H,et al.HEV Control Strategy for Real- time Optimization of Fuel Economy and Emissions.SAE Paper 2000-01-1543,2000.
[5] Baumann B M,et al.Mechatronic Design and Control of Hybrid Electric Vehicles.IEEE/ASME Transactions on Mechatronics,2000,5(1):58-72.