具外部扰动的变时滞不确定奇异系统的滑动模态控制
2012-07-05员陈鑫蒋威
员陈鑫,蒋威
(安徽大学数学科学学院,安徽合肥 230601)
具外部扰动的变时滞不确定奇异系统的滑动模态控制
员陈鑫,蒋威
(安徽大学数学科学学院,安徽合肥 230601)
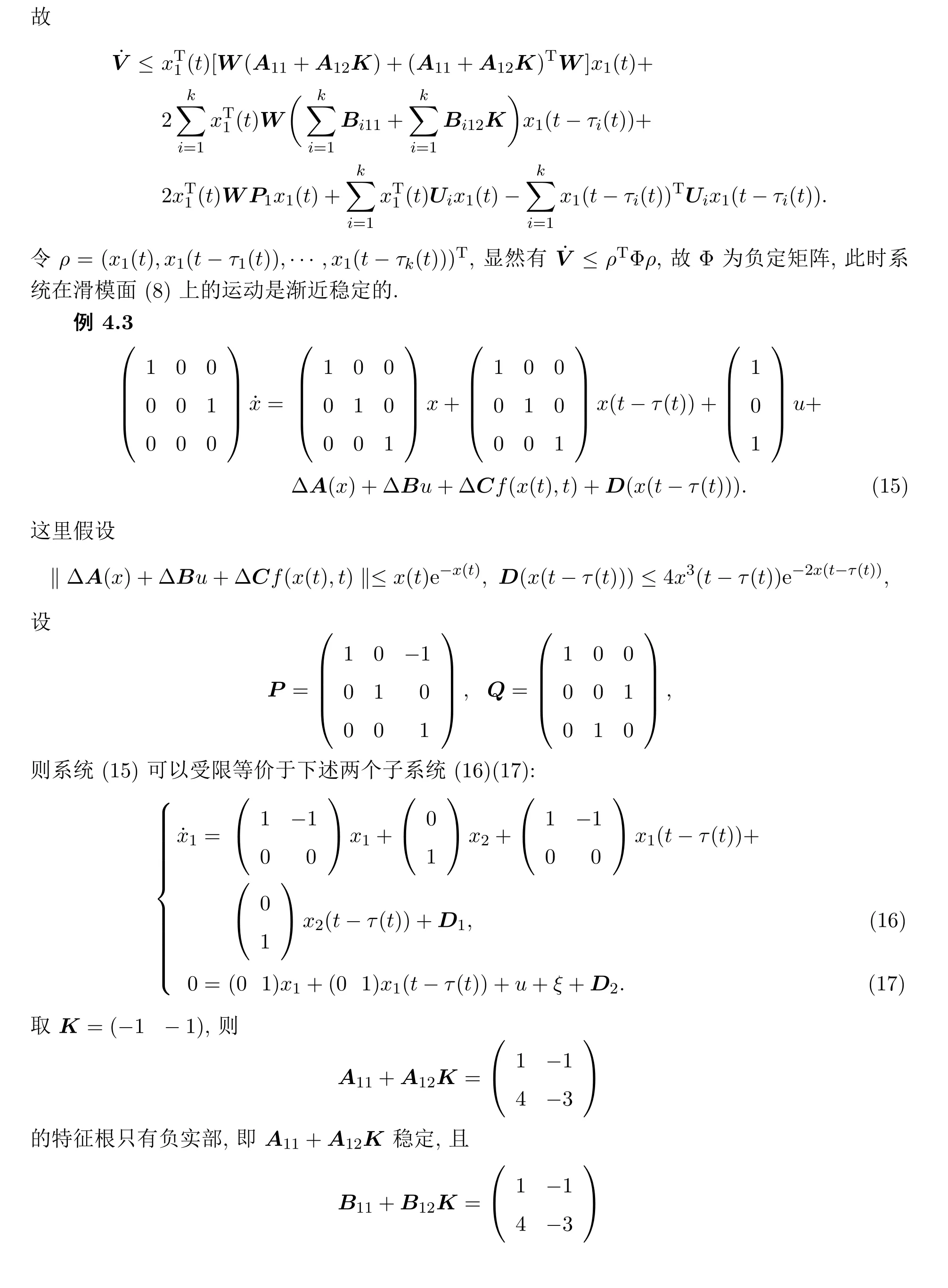
研究了含有多个变时滞的不确定奇异系统的滑动模态问题.该系统相比文献中已研究的系统更为复杂,具有多个变时滞,且分别含有匹配和不匹配的外部扰动项.通过对系统进行等价分解化为两个子系统,对分解后的系统进行切换函数的设计,再通过定义Lyapunov函数得到使得系统的滑模运动渐近稳定的充分条件.由此证明了所设计的滑模控制率能够保证状态轨迹在优先时间内被驱动到指定的切换面上且保持运动.设计过程简单,且结果以线性矩阵不等式呈现,相比文献中已有的结论更易于实现.最后通过例子验证结论的正确性.
滑动模态;变时滞;奇异;lyapunov方程
1 引言
滑模控制(sliding mode control,SMC)也叫变结构控制,本质上是一类特殊的非线性控制,且非线性表现为控制的不连续性.这种控制策略与其他控制的不同之处在于系统的“结构”并不固定,而是可以在动态过程中,根据系统当前的状态(如偏差及其各阶导数等)有目的地不断变化,迫使系统按照预定“滑动模态”的状态轨迹运动.
1977年,文献[1]开启了控制系统学界对变结构系统(VSS)和滑模控制(SMC)的研究热潮,国内的学者也针对不同特殊系统的滑动模态的控制问题进行了广泛的研究[27].其中文献[2]中利用Riccati方程对奇异系统研究了其滑动模态控制问题,文献[3]中对带有常数时滞和不确定项的系统研究了其滑模控制问题.但是对于含有多个变时滞以及同时含有匹配和非匹配不确定项的奇异系统的滑模控制的研究尚不多见.
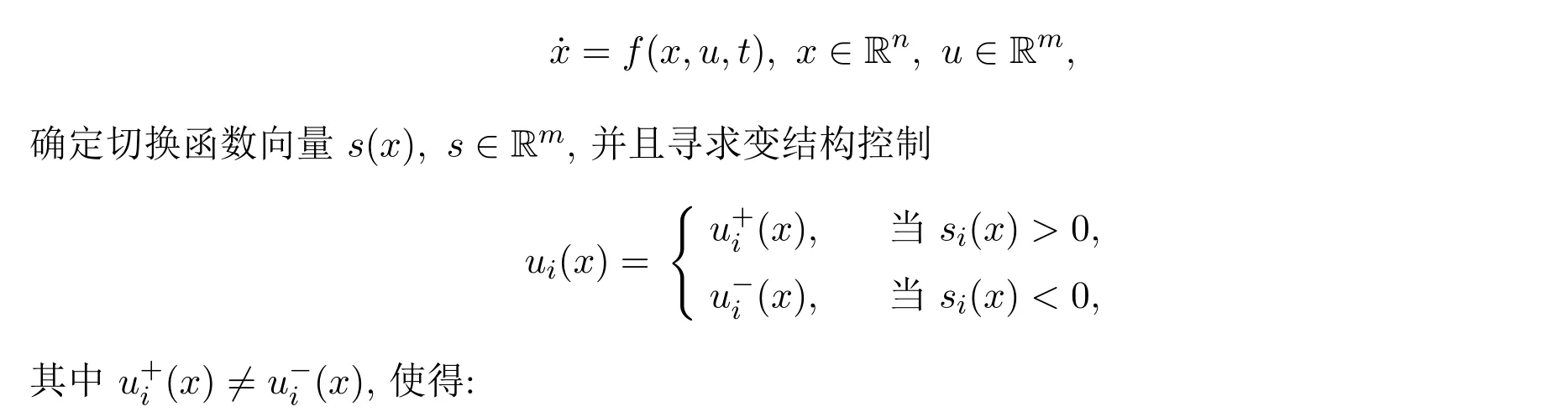
本文考虑系统


2 预备知识
定义2.1[8]设在初始时刻t0时,系统的初始状态为x0,时刻t时的状态为xt.另外,设超平面s包含原点x=0.则此时对于任意在s之上的状态x0,在t>t0之后,都有xt存在于s之中.此时,xt就是系统的滑动模态或称为滑模运动.
定义2.2[9]对于非线性控制系统
(1)满足到达条件:切换面si(x)=0以外的相轨线将于有限时间内到达切换面;
(2)切换面是滑动模态区,且滑动运动渐近稳定,动态品质良好.
称这样的控制为变结构滑动模态控制.

3 主要引理
对于系统(1),做如下的假设:
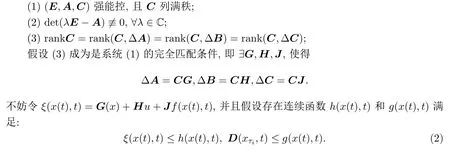
因此系统(1)可以简记为以下的形式:

引理3.1对于由状态方程描述的连续线性定常系统˙x=Ax,其中A是n×n常量矩阵,则原点平衡状态xe=0是大范围渐近稳定的充分必要条件为:
对给定任一正定实对称矩阵Y,李雅普诺夫方程XA+ATX=-Y有惟一正定实对称矩阵解X0.
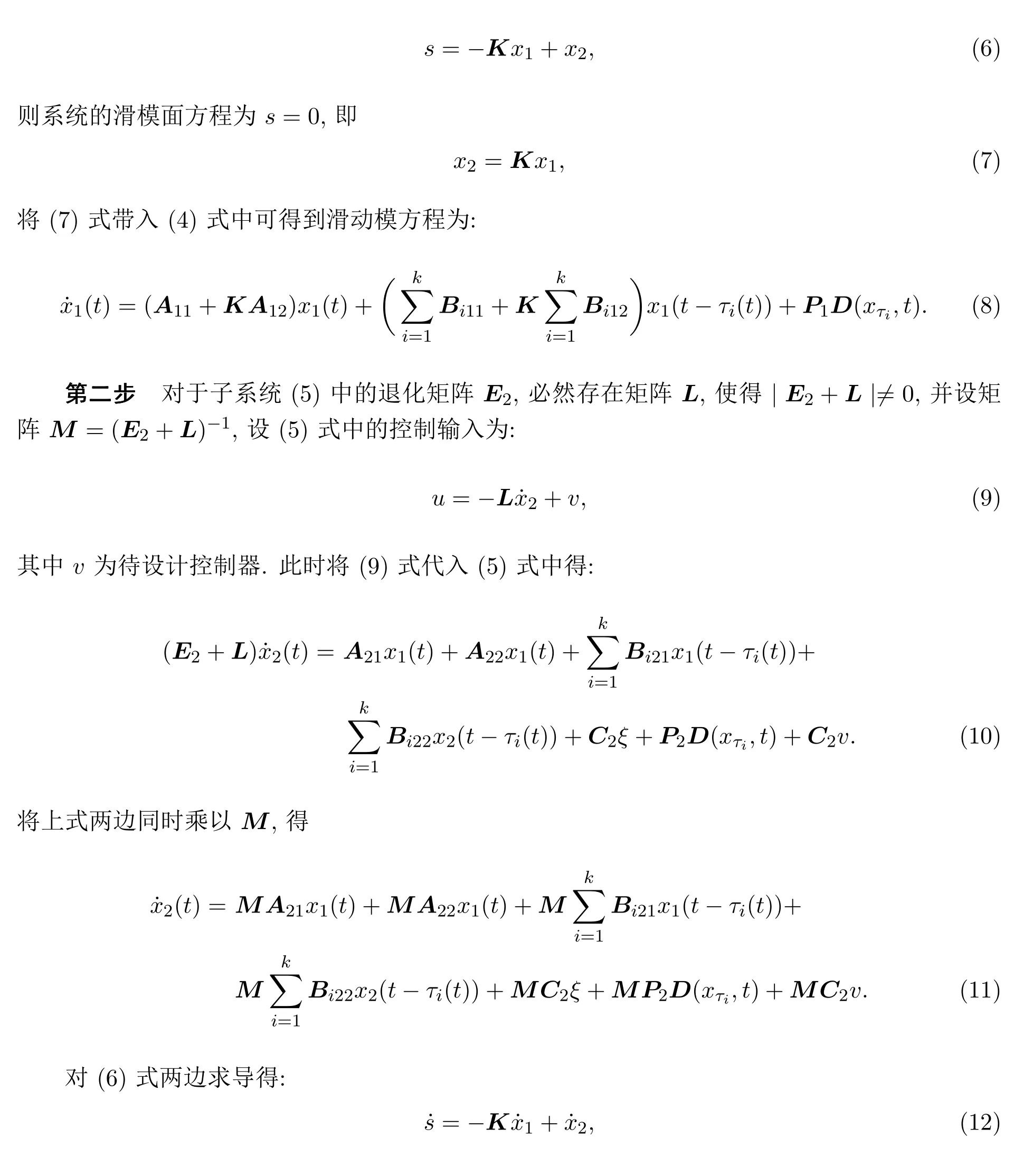
引理3.2若系统(3)满足假设(1)-(3),则必然存在非退化矩阵P,Q,使得系统(3)等价于下面两个子系统(4)(5):


4 综合设计
通过上面的分析推理,可知系统(1)的滑动模态控制问题可以等价为系统(4),(5)的综合设计问题.为了达到系统的滑模控制的目的,这里将系统的设计过程分成三步进行:一、首先设计系统的切换函数;二、设计变结构控制率,使得系统在有限的时间内到达切换平面进行运动;三、保证系统在滑模面上的运动是渐近稳定的.
第一步定义系统的切换函数为:

其中p是关于t的连续函数,且有p>0.下面给出系统在有限时间达到滑模面并在其上运动的充分条件:
定理4.1若(13)式中的函数p满足条件p≥‖M‖‖C2‖h(x(t),t)+η,其中η>0,为常数,则系统(1)在有限时间达到滑模面并在其上实现滑模运动.
证明由(13)式可得:


非退化.取L=1,可由(13)得到可使系统渐近稳定的控制输入为:

[1]Utkin V I.Variable structure systems with sliding modes[J].IEEE Trans.Automat.Contr.,1977,22:212-222.
[2]温香彩,刘永靖.奇异不确定系统的滑动模态控制[J].控制理论与应用,1995,12(1):114-118.
[3]卜春霞,侯小丽,程桂芳.奇异不确定时滞系统的滑动模态控制[J].河南科学,2004,22(2):159-162.
[4]肖剑,梁家荣,樊仲光.线性滞后广义系统的二阶滑模控制方法[J].纯粹数学与应用数学,2010,26(3):478-483.
[5]Gouaisbaut F,Dambrine M,Prichard J P.Robust control of delay systems:a sliding mode control design via LMI[J].Systems and Control Letters,2002,46:219-230.
[6]Yan X G,Spurgeon S K,Edwards C.On discontinuous static output feedback control for linear systems with nonlinear disturances[J].Systems and Control Letters,2009,58:314-319.
[7]Magdy M,Abdelhameed.Enhancement of sliding mode controller by fuzzy logic with application to robotic manipulators[J].Mechatronics,2005,15(4):439-458.
[8]田宏奇.滑模控制理论及其应用[M].武汉:武汉出版社,1995.
[9]高为炳.变结构控制理论基础[M].北京:中国科学技术出版社,1990.
[10]郑大钟.线性系统理论[M].北京:清华大学出版社,2002.
Sliding mode control for uncertain time-delays singular system with external disturbances
Yuan Chenxin,Jiang Wei
(Department of Mathematics,Anhui University,Hefei230601,China)
This paper discusses the sliding mode control for uncertain time-delays singular system with external disturbances.The discussed system is more complicated than papers listed in the reference,for it has several delays,and both matching and mismatching external disturbances.Based on the transformation from the uncertain singular multi-delay-system to two subsystems,firstly we design the switching function such that system could be drift onto the sliding surface in limit time and maintains motion on it.After that we get the sufficient condition of asymptotic stabilization of sliding mode motion by defined the Lyapunov-function.The design process is simple and the result is given by form of LMI so that the realization is more easy than papers listed in the reference.At last we take a numerical example to demonstrate the correctness of the results.
sliding mode control,singular,time-delay,lyapunov function
O231.2
A
1008-5513(2012)04-0531-09
2012-04-09.
国家自然科学基金(11071001);高校博士点专项科研基金(20093401110001);
安徽省高校重大项目(KJ2010ZD02);安徽省高校自筹经费项目(KJ2012Z338).
员陈鑫(1984-),硕士生,研究方向:泛函微分方程及控制论.
2010 MSC:93C23