月基极紫外相机反射镜组件设计与分析
2012-07-05李朝辉
李朝辉
(中国科学院 长春光学精密机械与物理研究所,长春 130033)
探月工程有效载荷极紫外EUV(Extreme Ultraviolet)相机安放在月球着陆器上,通过二维精密跟踪转台完成对地球的对准指向,开展对地球整个等离子体层的成像观测,为科学家对磁暴研究提供离子层精细图像,对于地球空间环境研究具有重要意义。根据任务要求,EUV相机对地球磁体中He++粒子的谐振散射所形成的30.4nln的辐射进行成像探测,因此光学系统以反射式为解决方案,该波段的透射光学玻璃很难制造。另外,球面MCP探测器与反射镜一起构成光学系统可减小畸变[1-4]。
球面反射镜是极紫外相机中的关键元件,由于月球表面温差非常大,因此对反射镜的支撑结构设计提出了较苛刻的要求,既要在极限温度条件下支撑结构稳定可靠,不损坏光学元件,又要在要求的温度范围内保持反射镜面形稳定。另一个难点是力学振动量级强与高度轻量化的要求相互矛盾,需要很好折中和平衡,以满足探月工程的技术要求。
1 光学系统
根据EUV相机的任务要求,反射镜组件结构设计的主要约束条件如下所示。
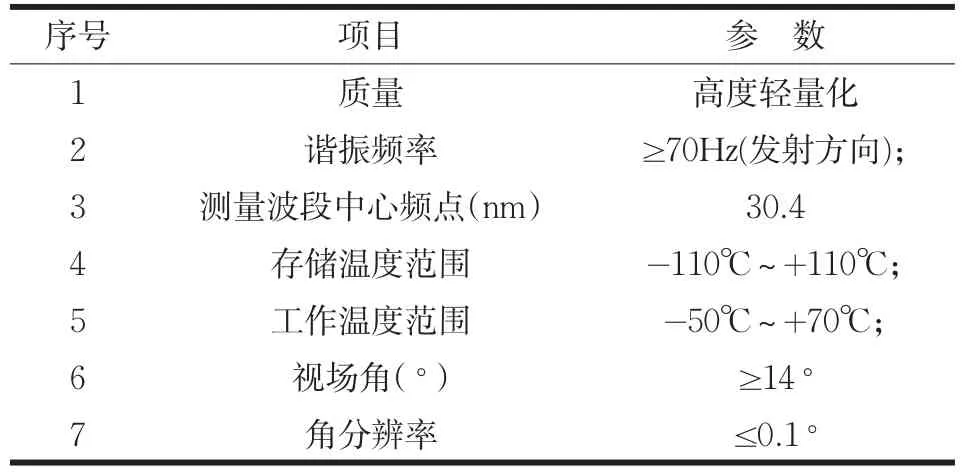
表1 主要技术要求与设计约束Tab.1 Main technical items and design constrains
国外已发射的极紫外探测器主要有美国的IMAGE,其光学系统由镀多层膜的球面反射镜、滤光片和球面MCP位敏阳极探测器组成。滤光片安装在入瞳位置处,对30.4nm透过,同时抑制121.6nm的辐射,光线通过滤光片到达反射镜,聚焦到球面MCP表面。其整个圆视场可达30°,反射镜直径123mm,MCP探测器直径Φ40mm。日本的SELENE卫星搭载的极紫外望远镜TEX也采用了相类似的光学系统。
综合考虑任务指标,EUV相机光学系统采用与IMAGE相同的形式,在结构尺寸重量和视场、焦距、探测能力间进行优化设计,光路如图1所示。
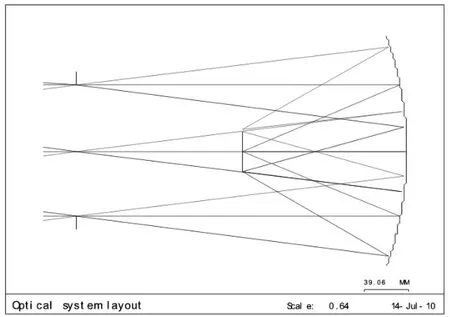
图1.EUV相机光学系统图Fig.1 Optical system of EUV camera
光学设计结果得到设计参数为:焦距 f=150mm;凹球面反射镜的曲率半径R=300mm,口径191mm;入瞳在反射镜面的球心处,入瞳外口径Φ 118mm,中心遮拦口径Φ66mm;MCP探测器凸球面曲率半径为150mm,有效口径为Φ40mm。其圆视场为15°,角分辨率≤0.1°。
该光学系统对反射镜支撑结构和镜筒的设计提出了较为严格的要求,MCP球面探测器球心与反射镜球心轴向偏差≤0.05mm,像面倾斜≤20″,反射镜面形精度(RMS)≤16nm,因此,要求结构稳定,刚度好,能保证光学装调后的位置精度保持不变。
2 反射镜支撑结构设计
成像单元由反射镜组件、镜筒和MCP探测器组件组成,成像单元安装在二维精密跟踪转台上,在相机总体结构中的位置如图2所示。
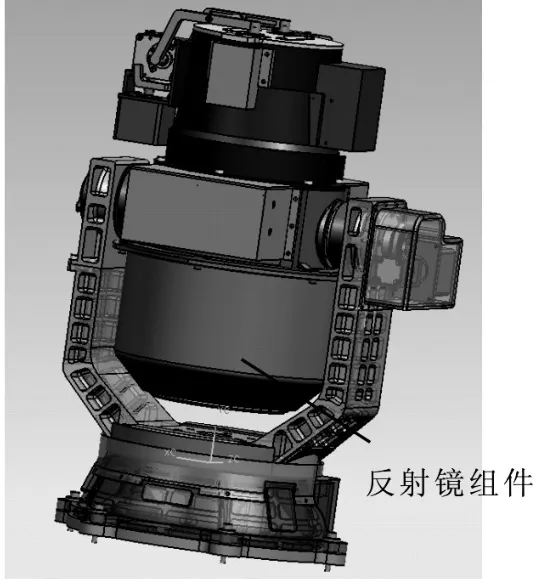
图2 EUV相机总体布局Fig.2 General layout for EUV camera
反射镜组件由反射镜、反射镜支撑结构和镜筒三部分组成。
2.1 反射镜轻量化形式[6]
考虑超光滑表面加工工艺的要求以及月球表面恶劣的环境工况,反射镜材料采用低膨胀微晶玻璃Zerodur,反射面镀Mo/Si多层膜。该材料比刚度相对较低,热导率小,受外界环境因素影响的概率较大,因此在设计和研制过程中,需要着重注意热学和力学的影响,并采取相应的结构和工艺措施来避免。
首先,对反射镜进行轻量化设计。从局部看,轻量化孔的形式通常有三角孔、四边形孔(矩形孔)、六边形孔(蜂窝形孔)和扇形轻量化结构等。考虑EUV相机的反射镜直径不很大,结合现有的加工工艺水平,通过分析计算,选择背部开放式结构中心辐射加强筋作为反射镜的轻量化形式,整个背部形状为拱形以提高反射镜刚度。
反射镜的结构形式如图3所示。

图3 反射镜的轻量化结构Fig.3 Light-weight structure of the mirror
反射镜中心凸台作为定位支撑面,反射镜的边缘进行倒角轻量化处理。径厚比为1/7,最大外形厚度44mm,镜面厚度9mm,加强筋厚度5mm。轻量化后的反射镜重量1.12kg,轻量化率30%,裸镜自重变形PV值43.6nm。并且加工工艺性较好,加工应力均匀,刚度分布均匀。
2.2 反射镜支撑结构[7-9]
反射镜外形尺寸为Φ191×28mm,结构对称且尺寸不是很大,采取中心支撑的方式。中心支撑可以是支撑心轴与反射镜孔联结的方式,如图4(a)所示,也可以是支撑镜座与反射镜背部凸台轴联结,如图4(b)所示。支撑方式(2)中反射镜凸台轴与镜座外环胶接,靠镜座内轴定位,保证反射镜与镜座间的胶层厚度均匀,反射镜抵抗镜座变形所产生弯矩的能力强,故采用镜座—反射镜芯轴的固定方式。
为了减小温度变化带给反射镜的应力变形,选取与Zerodur玻璃相匹配的超低膨胀殷钢制作反射镜支撑结构。反射镜中心凸台与反射镜镜座(殷钢)用RTV胶粘接,胶粘工艺应严格保证胶层厚度的均匀性,0.2mm的胶层厚度可满足的粘接强度的要求。为防止大温差范围下的线胀系数不一致所产生应力对面形的影响,沿圆周120°均布三处应力释放槽,使胶层产生的粘接应力作用在殷钢镜座上,从而减小对反射镜的影响。
反射镜镜座与碳纤维反射镜镜筒底端的殷钢镶嵌件联结,为了减小安装面面形误差引起的装配应力,殷钢镶嵌环与反射镜镜座联结的三处安装面有一定的柔性,既要减小安装应力,又要满足力学振动的工况条件和光轴稳定性的技术要求。
连接MCP探测器和反射镜组件的联结中筒,是保证在±50℃温差条件下离焦量不大于0.05mm的重要部件,因此选取线膨胀系数(CTE)低的碳纤维复合材料(CFRP)来制造联结中筒。另外,CFRP的弹性模量高,比刚度大。有限元分析结果表明,整个成像镜筒的特征频率363Hz,在重力作用下镜筒端面最大位移0.002mm,倾斜变形≤3″。

图4 反射镜组件Fig.4 Subassembly of the mirror
2.3 反射镜面形精度分析
对反射镜组件进行了有限元分析,分析计算时其热膨胀系数取0.15×10-6/℃,微晶玻璃热膨胀系数取0.05×10-6/℃,即反射镜镜座材料的热膨胀系数为反射镜热膨胀系数的3倍。
2.3.1 反射镜组件的模态
在约束条件下反射镜组件的模态如表2所示。
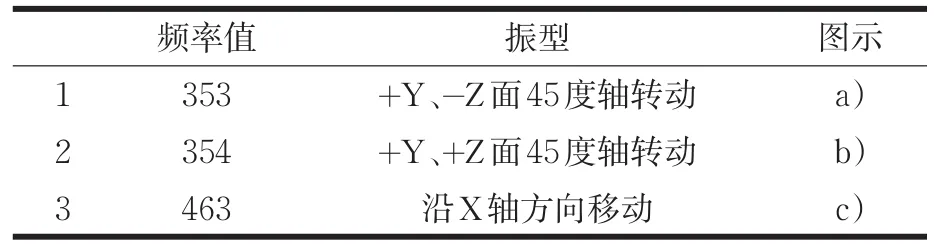
表2 反射镜组件有限元分析Tab.2 Finite element analysis of the mirror assembly
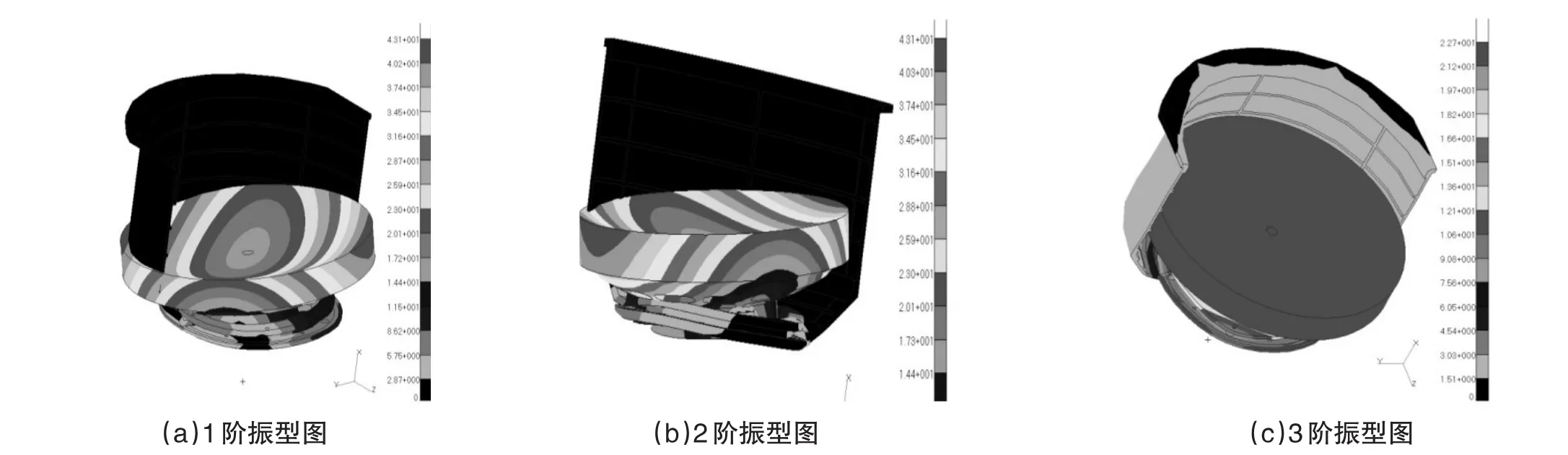
图5 模态振型示意图Fig.5 Modal graph of the mirror
2.3.2 微重力分析
考察在地面装调状态下,反射镜在重力载荷下的镜面面形精度情况,分析结果如表3所示。其中:Gx-X方向1g重力载荷;Gy-Y方向1g重力载荷;Gz-Z方向1g重力载荷。X向为光轴方向。
在三个方向微重力载荷下反射镜面形精度(RMS)≤7nm,满足光学系统的设计要求
2.3.3 热载荷分析
根据探月着陆器的热载荷工况,需考察±50℃均匀温降载荷作用下反射镜的面形变化,分析结果表明,50℃均匀温降下反射镜面形精度为(RMS)13.44nm,满足光学系统成像质量要求。
因此,反射镜具有足够的刚度,加工过程中无变形,反射镜竖直和水平状态下面形保持稳定。
3 试验验证
3.1 力学试验
反射镜组件(镜座与反射镜)做了组件级应力筛选试验,包括50%验收级,100%验收级随机振动,以及高低温存储试验。反射镜组件力学试验如图6所示。
每次试验后利用干涉仪进行面形检测,使用干涉仪检测结果如图7所示。检测结果为裸镜0.02λ(RMS),粘接后为0.026λ(RMS),随机振动及高低温存储试验后变为0.026λ(RMS)。
反射镜面形0.026λ=16.45nm(RMS),与技术指标要求16nm略有偏离,经光学设计与MCP成像机理的深入分析,以及鉴定产品的热真空成像试验验证,反射镜面形不大于20nm(RMS)满足要求。因此,在后续产品反射镜组件研制过程中,要进一步提高加工装配精度,减小装配应力。

图6 反射镜组件振动试验Fig.6 Vibration test of the mirror assembly

图7 反射镜面形检测结果Fig.7 Measurement result of the mirror assembly
3.2 成像分辨率测试
为了验证反射镜及其支撑结构的合理性和稳定性,首先对整个成像单元进行力学和高低温循环试验,试验后利用极紫外光管和真空罐进行空间分辨率测试。使用紫外准直光束均匀照射分辨率板,分辨率板置于准直透镜焦面上,分辨率板经反射镜聚焦到探测器上成像,微调分辨率板位置多次成像,分析多组目标板的图像,找出最清晰的一组图像,结果表明空间分辨率优于6lines/mm,即角分辨率0.07°。
4 结论
根据探月工程科学目标要求,深入研究国内外极紫外探测光学遥感器的原理与技术方案,设计了满足工程任务要求的可对地球整个等离子层进行成像的光学系统。反射镜是该系统关键部件,重点对反射镜支撑结构进行了详细设计、有限元分析和试验验证,以满足探月工程特殊的力学、温度、高真空等环境条件要求,以及严格的重量要求。通过环境试验表明,反射镜及支持结构温度适应性好,在50℃的温差条件下,反射镜面形满足要求,系统离焦量≤0.05mm,成像性能指标满足任务指标要求。同时,该组件能承受强量级的冲击、振动,其抗力学特性满足登月过程的特殊任务要求。
[1]HADAWAUJB,JOHNSONRB.Designand analysis of optical systems for the Stanford/MSFC multi-special solar telescope array[J].S PI E,1989,1160:195.
[2]ARTHUR B C,WAL KER J R,JOAKIN F,et al..High resolution imaging with multilayer soft X-ray,EUV and FUV telescopes of modest aperture and cost[J].S PI E,1991,1494:320.
[3]叶培建,孙泽洲,饶炜.嫦娥一号月球探测卫星研制综述[J].航天器工程,2007,16(6):9-15.
[4]B.R.SANDEL1,A.L.BROADFOOT,et al..The extreme ultraviolet imager investigation for the image mission[J].Space Science Reviews,2000,9:197-242.
[5]王咏梅,付利平,王英鉴.星载远紫外极光/气辉探测发 展 综 述[J].地 球 物 理 学 进 展 ,2008,23(5):1474-1479.
[6]陈波,尼启良.空间软X射线/极紫外波段正入射望远镜研究[J].光学精密工程.2003,11(4):315-319.
[7]张锐,陈志远,杨世模,胡企千.空间太阳望远镜主镜支撑结构的优化设计[J].光学技术,2007,33(1):23-26.
[8]项卫国,常宁华.空间相机中与大口径透镜有关的结构设计分析[J].航天返回与遥感,2006,27(1):32-35.
[9]曾勇强,傅丹鹰.空间遥感器大口径反射镜支撑结构型式综述[J].航天返回与遥感,2006,27(2):18-27.