多雷达距离测量空间定位方法及精度分析
2012-07-04潘江怀
常 清, 潘江怀, 安 瑾
(江苏自动化研究所,江苏 连云港 222006)
0 引言
多平台雷达组网需要综合利用各平台的雷达信息,获得对目标位置一致、精确的定位,形成统一的态势。在信息融合过程中,为了对各雷达信息进行综合处理,需要将各平台雷达探测信息转换到公共参考坐标系(即相同的时空参考坐标系)中。理想情况下,同一时刻各雷达探测结果应重合。但由于雷达测量误差尤其是系统误差的存在,使得各雷达探测结果之间存在较大差异,影响量测(局部航迹)和航迹的关联、目标跟踪及航迹状态估计,造成目标冗余、航迹精度降低、航迹零碎等情况的出现,影响战场态势一致性。通常,雷达的测距可以利用对固定目标的探测进行静态标定,以减少其测距的系统误差,而且可以较好地保持;而雷达的测向(尤其是动平台雷达,如舰载/机载雷达),其系统误差受到雷达测量误差、甲板形变误差、平台定位误差、平台姿态误差、时间误差等综合影响,一般较难通过简单的标校进行校正,且校正后一般很难保持。因此在一般情况下,雷达的测距精度比较高,而测向精度较低,在有多部雷达组网时,可以利用多部雷达对同一目标的距离交汇对目标进行定位。
1 多雷达距离测量空间定位模型
基于ECEF的三雷达距离测量空间定位示意图如图1所示。
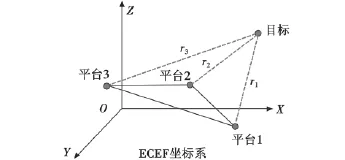
图1 三雷达距离测量空间定位示意图Fig.1 Range detecting space location of the three radars
三部雷达所在的位置为(Li,Bi,Hi),i=1,2,3,各雷达对目标的测距为 r1,r2,r3。
由ECEF坐标转换可知,各平台在ECEF坐标系中的位置为(xpi,ypi,zpi),i=1,2,3,假设目标在 ECEF坐标中的位置为x,y,z,则由空间定位可知

由平台站址坐标,可以计算出雷达站之间基线长度为

基线的方向余弦为

两基线之间的夹角为
r1在基线d12和 d13上的投影分别为

则目标在ECEF坐标系中位置为

2 多雷达距离测量空间定位精度分析
根据各平台雷达给出的测距信息,可直接由各雷达测距精度解算出目标的位置精度。测距误差方程为

式中,cos αi,cos βi,cos γi为平台到目标的方向余弦。矩阵形式表示为

下面分等精度和不等精度情况。
1)等精度测距。
当各平台雷达测距精度相近时(假设测距精度为μ2),则目标点位置误差为

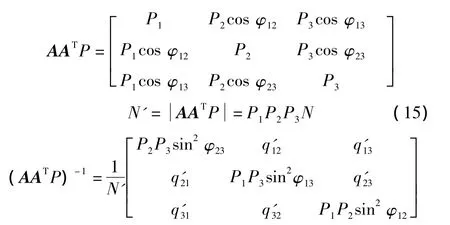
根据矩阵迹的性质可知:tr(AB)=tr(BA)-1

则有

式中,φ12,φ13,φ23为测距三雷达测距 r1,r2,r3之间的空间夹角;N为矩阵的行列式值。

所以

该式表明,目标S的精度除受测距精度的影响外,完全取决于测距交汇的空间图形,而空间图形以各测距之间的交汇角表示。所以,一旦知道距离的测量值,便可立即估计,不需要目标的近似坐标,对误差的分析计算更加直接,对各平台的优化布局具有指导意义。
2)不等精度测距。
当各平台雷达测距精度相差较大时,对各平台测距设定一个加权系数 Pi=μ2/,μ为单位权标准偏差,为各平台测距精度,则目标点位置误差为

故可得误差计算式为

3 空间最优定位点计算
因为不等精度测量表达式与等精度测量表达式一致,为简化起见,在最优定位点的分析上只讨论等精度测距。等精度测距定位点误差可表示为


式中,Q=sin2φ12+sin2φ13+sin2φ23。
由优化求解可知,在上式的解为cos φ12=cos φ13=cos φ23=0,即

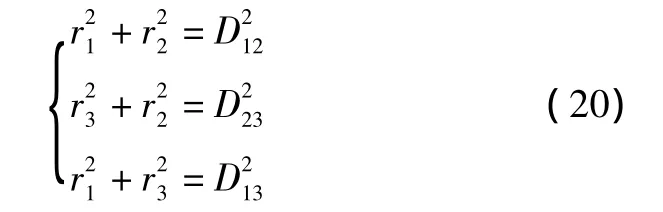
方程(20)有唯一解,说明三平台的最优定位点是唯一的。而且通过解析几何可知,利用简单的几何关系就可以计算出取得最优定位点的最优边长。通过最优边长的计算也可以粗略地估计测量精度。在测量中,应优化平台位置,使被测物体尽量位于最佳交汇点附近。
当S点为最优定位点时,平面角度有如下方程

所以0°<cos∠213<90°,同理,0°<cos∠123 <90°,0°<cos∠132<90°。这样,就可以知道最优定位的第一个必要条件:当S为最优定位点时,平台组成的平面三角形必需为锐角三角形。
当S点为最优定位点时,三个平台位置组成的平面方程为

S点至平面的距离为

三条测距相对于平台平面的夹角为

即有,sin2ε1+sin2ε2+sin2ε3=1。
假设三平台构成等边三角形,待测目标S在三角形的正上方变动。则待测目标S至各平台的距离误差方程式可写成

式中:ε为平台对目标的仰角;β为方位角。组成法方程并消去交叉项的方程系数矩阵为

则待测目标S的平面位置中误差及三维点位中误差为
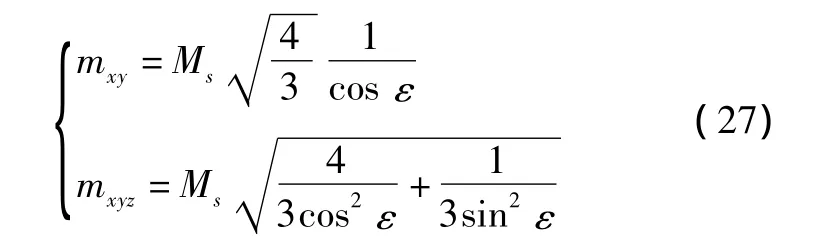
由上述分析得到如下结果。
2)雷达俯仰角ε越小,平面位置精度越高,但高程精度却大幅度降低;ε越大,平面精度越低,但高程精度却较高。
取雷达测距精度为σr=50 m时,目标定位精度随ε变化的曲线如图2所示。
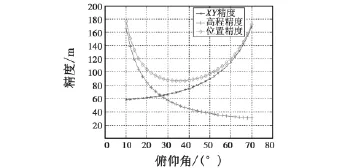
图2 目标定位精度随俯仰角变化的曲线图Fig.2 Target location precision vs elevation
4 仿真验证
设雷达1,2,3 的大地坐标分别为 (121.2°,26.5°,0 m),(121.3°,26.5°,0 m),(121.3°,26.4°,0 m),探测精度为(100 m,0.3°)。目标的运动轨迹为(L(k),26.7°,2000 m),L(k)=120.95+(k-1)*0.008,k=1,2,…,100,仿真场景如图 3 所示,目标定位结果如图4所示。
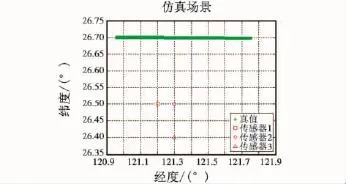
图3 仿真场景Fig.3 Scene of simulation
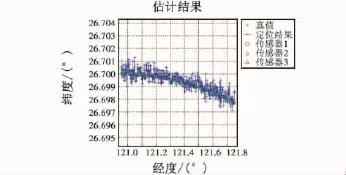
图4 定位结果局部放大图Fig.4 Locating results of partial enlargement
从仿真的效果可以看出,基于多雷达的距离量测的定位精度可以较好地实现目标定位,其最大误差在110 m左右,和雷达的测距精度相当。
5 小结
针对雷达的测距精度一般比较高,而测向精度较低的情况,本文提出了一种基于多雷达距离测量空间定位方法。该方法基于ECEF坐标系,根据雷达站之间基线长度和方向余弦,将各雷达对目标距离测量在方向余弦上进行投影,进一步计算目标在ECEF坐标系中的空间位置。此方法只需要确定各雷达站的大地坐标,就可以给出目标的大地坐标,可以有效解决地球曲率所带来的坐标转换问题,并且不涉及高次方程组和多值解判断,也不涉及迭代初值计算。该定位系统不仅能得到较高的定位精度,同时,作用距离可以很远。通过对目标定位的精度分析可知:1)目标定位精度不仅与雷达测距精度有关,还取决于平台与目标的测距交汇的空间图形,而空间图形以各测距之间的交汇角表示;2)雷达俯仰角越小,平面位置精度越高,但高程精度却大幅度降低;俯仰角越大,平面精度越低,但高程精度却较高。本研究对于多雷达的布站具有一定的指导意义。
[1]FISCHER W L,MUEHE C E.Registration errors in a netted air surveillance system[R].Report 1980-40,MIT Lincoln Lab,Sept,1980.
[2]DANA M P.Registration:a prerequisite for multiple sensor tracking[M].Multitarget Multisensor Tracking:Advanced Application.Artech House Inc,1990.
[3]韩崇昭,周彬,元向辉,等,共同杂波环境下多目标量测数据的误差传递与校正[J].自动化学报,2007,33(7):771-774.
[4]NABAA N,BISHOP R H.Solution to a multisensor tracking problem with sensor registration errors[J].IEEE Transactions on Aerospace and Electronic Systems,1999,35(1):354-363.
[5]潘江怀,李洪梅,何佳洲.三维传感器组网偏差估计方法[J].火力与指挥控制,2008,33(4):104-106.
[6]何友,修建娟,张晶伟.雷达数据处理及应用[M].北京:电子工业出版社,2009.
[7]潘江怀,何佳洲,罗双喜.舰载雷达探测误差传递与灵敏度分析[C]//第三届中国信息融合大会,2011:514-520.
[8]HERMAN S M,POORE A B.Nonlinear least-squares estimation for radar and navigation biases[C]//Proceedings of SPIE Signal and Data Processing of Small Targets,2006,6236:1701-1717.
[9]OKELLO N N,RISTIC B.Maximum likelihood registration for multiple dissimilar radars[J]IEEE Transactions on Aerospace and Electronic Systems,2003,39(3):1074-1083.
[10]CRUZ D,ALOUANI E J,RICE A T,et al.Radar registration in multiradar systems[M].In Proceedings of the SPIE Symposium on Aerospace Sensing,1698,Orlando,FL,1992.
