基于CCD图像处理的视度和视差自动检测系统
2012-07-04张晓明
张晓明, 赵 辉
(中国人民解放军92854部队,广东湛江 524005)
0 引言
视度和视差是光学观瞄仪器的基本参量,在军用光电观测装备的出厂和维修检测中为必检的项目,传统对视度和视差的测量方法是利用视度筒和平行光管视差仪[1]。视度筒直接检测视度的方法比较落后,其缺点主要是在判断物像“清晰”时人的主观影响较大,而且检测过程耗费大量时间和精力。平行光管视差仪检测视差的不足之处是只能检测出被测系统的视差是否在要求范围内,不能给出视差的量值。近年来高灵敏度低噪声CCD器件以及数字图像处理技术获得了较大发展,如何实现视度和视差数字化检测日益成为研究的一个热点[2-4]。在总结前人研究成果的基础上,本文采用CCD光电转化器件构建了视度和视差的检测系统,结合CCD自动对焦和图像处理技术,实现了对视度和视差自动化、数字化和定量化的检测,从而消除了人为主观因素影响,同时提高检测效率和精度。
1 基于CCD的视度和视差检测原理
1.1 视度检测原理
基于CCD的视度检测原理可用图1说明。被测装备、CCD摄像物镜与CCD光敏面共轴,CCD光敏面可在该轴方向上移动,与CCD摄像物镜构成一个像面可调的摄像系统,实时摄取被测装备出射的物像。
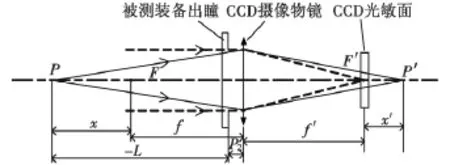
图1 CCD视度检测原理图Fig.1 The principle diagram of diopter testing with CCD
当被测视度为零时,通过被测装备进入摄像系统的光束为平行光,此时若移动CCD光敏面到摄像系统焦平面的位置,将会成最清晰的像。当被测视度不为零时,进入摄像系统的光束将汇聚(视度为正值)或发散(视度为负值),以汇聚情形为例,成像在像方焦平面后的点P',P'对应物点在物方焦平面前的P点,此时若要使系统成最清晰的像,需要将CCD光敏面从焦平面移动到P'所在的平面,移动量为x'。显然x'的值与光束汇聚或发散的程度有关,反映了视度的大小。
被测装备视度SD与CCD光敏面移动量x'之间的关系可由牛顿公式求出。根据牛顿公式x·x'=f·f'和几何关系x=L-P2+f',可得

注意到SD=1/L,并略去被测装备出瞳与CCD摄像物镜之间的紧靠距离P2,得

式中:f'为摄像系统焦距,单位为mm。由式(2)可知,摄像系统焦距一定时,若测出CCD光敏面相对焦平面的移动量x',则可求出装备的视度值。
1.2 视差检测原理
装备视差是由于装备的像面与分化板在轴向上不重合而引起的,通常用角视差来表示。由于视差的存在,装备出射的目标像光束与分化线像光束汇聚或发散的程度不同,导致目标与分化线在CCD摄像系统再一次成像的位置不重合。因此可以通过测试目标光束与分化板光束相对应的视度,将二者取差,差值Δ(SD)反映了视差的大小。这种方法求出的视差称作视度视差,与角视差的关系为[5]

式中:ε为角视差,单位为分;D'为被测装备出瞳直径,单位为mm;Γ为被测装备放大率。由式(3)可知,视差的检测建立在视度检测的基础上,辅以被检装备出瞳直径和放大率两个参数即可得出视差值。
2 系统组成及功能
通过上述原理分析,利用CCD对视度和视差的自动化检测,关键是要测试图像最清晰时的CCD光敏面位置,因此需要构建图像采集与处理系统:一方面测试图像清晰度;另一方面实现CCD的自动对焦。为此提出自动检测系统设计,如图2所示。系统主要由光源、平行光管、CCD摄像系统、图像采集与处理系统。其中,CCD摄像系统主要由短焦摄像系统、高分辨率CCD光电接收器件、高精度直线运动导轨、光栅尺以及步进电机组成;图像采集与处理系统由计算机、图像采集卡以及检测软件组成。
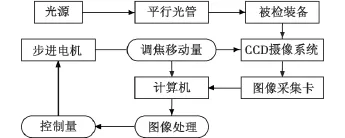
图2 自动检测系统框图Fig.2 The diagram of automatic measurement system
检测系统采用装有靶标的平行光管提供无穷远目标,采用与平行光管透过波长相匹配的绿色光源对靶标进行照明。CCD摄像系统对被检装备所成的目标像进行拍摄,输出黑白模拟视频图像,CCD响应峰值在光源的绿光波段。在检测软件控制下,图像采集与处理系统实时采集、处理和显示CCD图像,完成对图像清晰度的测试,根据测试结果控制驱动电机带动CCD光敏面朝最大清晰度的位置运动,从而实现CCD自动对焦。自动对焦过程中,由光栅尺精确测出图像最清晰时的位置。检测程序应用式(2)、式(3)自动求出装备的视度和视差值。
3 自动检测功能的实现
3.1 图像处理
图像处理是系统实现视度和视差自动检测的关键环节,其主要目的是实现图像清晰度的测量和图像边缘提取。评价图像清晰度的方式很多,一般采用评价函数来衡量图像清晰度情况[6]。图像的轮廓边缘越清晰,它的梯度就越大,或者说边缘处靶标和背景之间的对比度就越大;反之,离焦的像,轮廓边缘模糊不清,梯度或对比度下降,且离焦越远对比度越低。本系统待处理的图像中包含靶标像和分化线图像,背景单一,靶标像和分化线图像的轮廓边缘与背景之间存在较大的对比度。基于这样的特点,图像清晰度测量采用基于像素灰度值的梯度评价函数扫描求解法,其优点是消除了背景噪声的影响,而且也削弱了光源照度波动性的影响[7],评价函数形式为

或

式中:f(x,y)为对应像素点(x,y)的灰度值;G为图像在水平方向长为m、垂直方向长为n的矩形区域内的像素灰度梯度和。式(4)定义了图像在垂直方向的灰度梯度,相应进行分化线图像清晰度的检测;式(5)定义了图像在水平方向的灰度梯度,相应进行靶标图像清晰度的检测,这样在两个方向上分别测量靶标和分化线图形清晰度,使测量能同步进行而不至于混淆。
为确保测量的有效性,需对图像的边缘进行提取以供观察,如果提取的图像边缘与实际图像边缘重合则证明测量是有效的。图像边缘提取也可采用灰度梯度的算法[8],以水平方向上的灰度梯度扫描为例,计算G时记录每行中像素的灰度梯度正值最大和负值最小时所对应的像素位置,当m行扫描完成后,得到2m个像素点。图像后期处理时将这些像素点进行红颜色的标记,从而在整幅图像背景上画出两条红色边缘线,即为图像垂直边缘轮廓。
为了减少计算量,提高系统的实时性,实际测试时可选取目标所在的一个小区域,然后计算该区域图像的清晰度,并提取该区域内的靶标的图像边缘。按照上述的处理方法,通过实验得到如图3所示的图像视频显示区域。

图3 图像处理与显示Fig.3 Image processing and display
图中,亮条纹为十字靶标的像,暗条纹为被检装备的分化线像,其水平部分有意调至亮条纹上是为了获得较大的对比度。显然,分化线像的水平边缘和绿线所围区域内的靶标像的垂直边缘得到了较好的提取,该幅图中,靶标图像清晰度和分化线清晰度测试值(灰度值)分别为152和189。
3.2 自动对焦实现
CCD摄像系统对焦是通过调焦电机实现的,电机运动速度和方向由计算机通过串口RS-485控制,运动过程中将每一步的位置向计算机报告。在图像清晰度测量的基础上,采用视频图像清晰度峰值搜索法实现自动对焦[9-11],其原理可用图4说明。步进电机将CCD感光面从高精度直线导轨的一头A经过焦平面F运动到另一头B,针对每一步进位置,计算机最少采集一帧图像,计算每帧图像的清晰度并记录清晰度值和相应的步进位置。通过对比清晰度大小,得出运动过程中的清晰度峰值所对应的位置P。最后改变调焦驱动电机的转动方向,将CCD光敏面定位到最佳成像位置P,从而实现了CCD自动对焦。
根据自动对焦的处理方法,实验测试了视度为+5D的装备,并绘制清晰度-测试时间图,如图5所示。由图可知,对焦全程运动中完成了清晰度峰值搜索,图像最终获得了最大清晰度。

图4 自动对焦原理示意图Fig.4 The principle diagram of autofocus
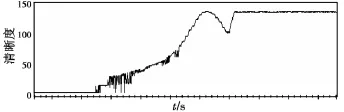
图5 清晰度-测试时间图Fig.5 The chart of clarity vs measurement time
4 检测结果及结论
利用上述检测系统对1具BBG-602手持激光测距机的视度进行检测,对5具同类测距机的视差进行检测。检测前测距机的视度和视差刚做完出厂调校,可认为其视度环读数准确,视差均为零。检测时,需根据视频区域的指示,调节装备与平行光管、CCD摄像系统同轴,同时在视频区域选中感兴趣的图像部分,运行检测软件,系统将自动完成检测。视度和视差检测结果如表1所示。
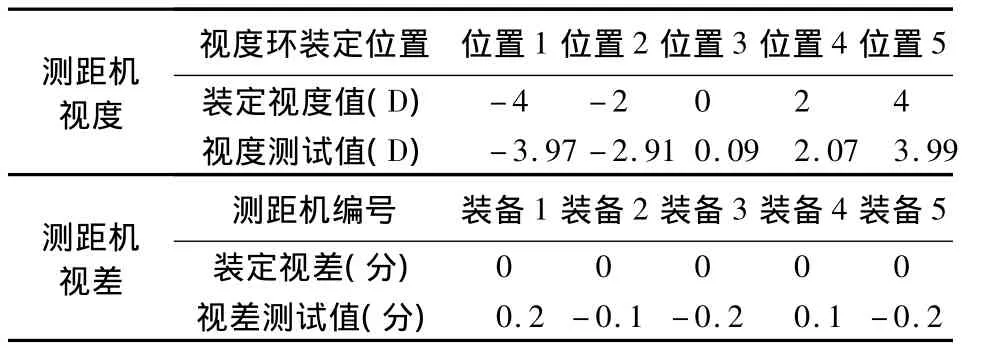
表1 测距机视度和视差检测结果Table 1 Test result of diopter and parallax for the rangefinder
从表1可以看出,视度和视差测试结果与测距机出厂标定的值具有较好的一致性。多次检测表明,检测结果具有较高的稳定性,视度检测不确定度在0.15 D以内,视差不确定度在0.3分以内,满足当前一般光电观测设备视度和视差检校精度要求,说明该检测系统的设计是合理的。
误差的主要来源有3个方面:1)平行光管光束平行差以及平行光管、被测装备和CCD摄像系统的光轴一致性;2)图像处理时清晰度峰值判别误差,此误差与CCD摄像系统焦深和分辨力、图像采集卡噪声、光源波动以及图像处理算法误差等有关;3)自动对焦定位误差,此误差与步进电机定位精度以及位置反馈精度有关。
本文所研究的视度和视差自动检测系统,其检测过程快速稳定、测试数据可靠准确,可广泛应用于军用光电观瞄装备的生产和维修检校。此外,本文阐述的CCD图像处理实现视度和视差检测的方法,对研究实现视度、光轴平行性、像倾斜、分辨力等多项光学性能指标一体化自动检测具有一定的借鉴意义。
[1]苏大图,沈海龙.光学测量与像质鉴定[M].北京:北京工业学院出版社,1987.
[2]刘秉琦,周斌.利用CCD实现望远系统视差自动测试的研究[J].半导体光电,2005,26(3):253-255.
[3]张伟,汪岳峰,董伟.光学仪器视差自动检测研究[J].光学技术,2002,28(4):365-366.
[4]CAO Weiguo,XUE Changxi,LI Lijuan,et al.The measurement and system error analysis of diopter and optical parallax in optical pointing system[J].SPIE,2008,6624:1-9.
[5]程守澄.光学仪器检校[M].北京:兵器工业出版社,1992.
[6]曹茂永,孙农亮,郁道银.基于灰度梯度的数字图像评价函数[J].光电工程,2003,30(4):70-72.
[7]王学影,张洪涛.基于图像处理的CCD摄像机自动调焦方法研究[J].测量技术,2005(8):16-18.
[8]宋曙光.图像边缘检测算法研究与分析[J].光机电信息,2010,27(9):44-47.
[9]SUBBARAO M,CHOI T S.Accurate recovery of three dimensional shape from image focus[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,1995,17(3):266-274.
[10]梁翠萍,李清安,乔彦峰,等.简析光学系统自动调焦的方法[J].电光与控制,2006,13(6):93-96.
[11]郑佳,周建忠,何大华.基于视频图像处理的快速对焦方法研究[J].光学与光电技术,2010,8(3):57-60.
