数控机床中分频段调压的步进电机驱动设计
2012-07-04王悦善
王悦善
(重庆三峡学院,重庆 404004)
0 引言
步进电机具有仅有周期性误差、精度高、能够用改变脉冲频率达到调速和正反转控制等,因为这些显著的特点,它已经成为机电一体化的一个重要产品,在自动化控制中得到广泛运用。配合微电子及计算机的发展,尤其是数控系统对步进电机的需求日益增加,全世界都在大力发展这一技术,我国数控系统的发展也取得了不少进步,自主研发了适合国情的各种数控系统,这对于步进电机控制的研究也很重要。
1 数控机床设计
数控机床是一种装有程序控制系统的自动化机床。它的控制系统可以处理控制编码或者别的符号指令规定的程序,在进行译码,使得机床动作数控折弯机。
数控机床和普通机床比具有以下五个特点:
1)加工精度高,质量稳定;
2)多坐标联动,能加工复杂零件;
3)遇到改变零件时,通常只要修改程序;
4)机床的刚性大、精度高,生产率高;
5)高程度的自动化,有效减轻劳动强度。
数控机床的分类按照控制方式可以分为开环控制、半闭环控制和闭环控制。开环控制不带位置反馈装置,本文介绍开环控制系统中的步进电机驱动器电路。
2 步进电机原理分析
2.1 步进电机概述
步进电机是一种受到脉冲信号控制,并将信
号转化成直线位移或者角位移的控制电机。它可当做一种特殊的同步电动机,供给电脉冲,它的运动形式是步进式的,因此叫做步进电动机。
步进电机是改变脉冲频率来调节电机的转速,还可以快速起动、制动和反转。其步距角和转速均不会被电压波动和负载变化影响。它在固定的步数下运动,因此其误差步距不会长期积累。它广泛用于数控开环系统中,简单又可靠。
步进电机的优点主要有定位精度高,无步距累积误差;开环运行机制降低了成本,可靠性高,在数控领域得到了广泛的应用。但是,步进电机在低速运行时的噪声和振动很大,在自然振荡频率附近运行时容易共振,输出转矩随转速的升高下降,需要通过改善驱动器来提升步进电机的性能。
2.2 步进电机驱动方式
步进电机驱动系统由步进电机、驱动器和控制器三大部分组成。当电机和负载确定后,驱动系统的性能就由驱动控制方式来决定。驱动方式具体可按如下分类:
1)恒电压驱动方式
(1)单电压驱动
在电机绕组过程中,只一个方向电压供电。(2)高低压驱动
使通电时绕组迅速至设定电流,关断时绕组电流立刻衰减为零,又具有较高效率。
2)恒电流斩波驱动方式
(1)自激式恒电流斩波驱动
将绕组电流值转化成一定比例的电压,比较D/A转换器的预设值,实现控制功率管的开关,控制绕组相电流。
(2)它激式恒电流斩波驱动
在D触发器加一个固定频率的时钟来解决自激式的浪涌电压问题,但仍然存在其它问题。
3)细分驱动方式
是步进电机驱动和控制的一大突破。细分驱动是每次脉冲切换时,只改变相应绕组中部分电流,合成磁势也仅旋转步距角的一部分。细分驱动时,绕组电流是阶梯波,额定电流是台阶式的投入或切除。
2.3 工作原理
步进电动机的步距角越小,它能达到的位置精度越高。步矩角一般为1.5°或0.75°。因此要把转子制成多极式,并在定子磁极上制成小齿,要和转子磁极上的小齿规格完全相同。当一相定子磁极的小齿对齐转子的齿时,其它两相磁极的小齿都是错过一个角度的。角度后一相比前一相的要大。

图1 步进电动机工作原理示意图
步距角的大小与通电方式和转子齿数用公式计算:

Z为转子齿数;m为运行拍数,一般等于相数或其数倍,即m=KN(N是电动机相数,K=1为单拍, K=2为双拍)。
3 调频调压驱动
3.1 设计思路
步进电机在高电压驱动时能够获得较好的高频特性,但是当它在低频工作时,由于绕组获得能量过大,使力矩下降、噪声加大,容易引起电机低频振荡甚至发生共振,使得步进电机可靠性降低,会因为电流太大而损坏电机。
本文提出的是利用单片机消除低频振荡,实现步进电机的调频调压,方法简单,效果却十分满意。要让电压随着工作频率而变化,分频段调压是最简单的方法,其中最少要将步进电机分成2段。具体的方法是用单片机8031和CD4051实现调频调压的步进电机。用8031检测的脉冲频率控制CD4051模拟开关,达到调整步进电机电源电压的目的。分频段调压具有不容易发生误操作和控制器配套方便的优点。
3.2 单片机
8031是最常见的MCS51系列的单片机系统,是INTEL公司最成熟的产品,应用范围广泛。它相当于一个微型计算机,将一个系统集成到芯片上。它是在线式实时控制、要求有较强的抗干扰能力,成本较低。它具有集成度高;结构简单、使用方便、模块化;可靠性强;功能强、速度快等优点。图2为单片机8031的管脚图。
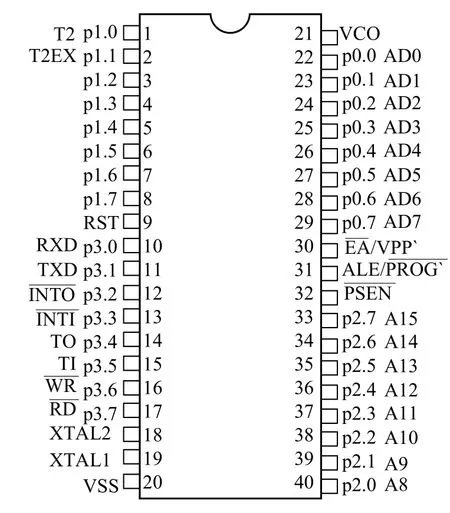
图2 8031管脚图
3.3 CD4051模拟开关设计
CD4051是一个八选一的模拟开关。它是一个带有禁止端和三位译码端控制的8路模拟开关电路;各个模拟开关都是双向传输信号。图3为CD4051的管脚图。
各管脚功能如下:
CP 接CPU脉冲信号
POTO 接CPU+5V
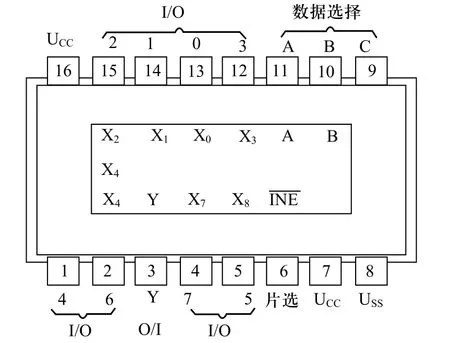
图3 CD4051逻辑功能管脚图
FREE 脱机,和CPU地线连接,驱动电源不工作
DIR 方向控制,电机反转VCC 直流电源正端GND 直流电源负接A 连接电机引出线红线B 连接电机引出线黄线
3.4 电路设计
图4为单片机控制步进电机的原理图。单片机提供三个控制信号给模拟开关:CP脉冲,一个让电机转动一个步距角;DIR,方向电平;FREE低电平时,脱机状态,节省电源。

图4 调频调压线路图
图中R0~R7 几个电阻可以按照具体情况进行设置。按照脉冲频率的变化,取到相应的电阻值,实现将步进电机的电源电压分成几段。模拟开关CD4051的二进制控制输入端分别为A、B、C,不断变换C, B, A的值(000~111),一共有8种状态,选择一种状态,使得输入和输出接通。当禁止端(INH)=“1”,即不接通,断开状态,若INH=“0”,为接通状态,其真值表为表1。

表1 CD4051真值表
4 结论
本文介绍了数控机床中开环控制系统用到的步进电机。详细介绍了步进电机的原理及其驱动方式,然后选择了调频调压的驱动方式来减轻或消除步进电机低频振荡的问题。使用单片机作为控制的核心,结合模拟开关,实现方法简便、易于控制、操作可靠,具有广阔的前景。
[1] 王玉琳.步进电机驱动的高低压切换技术[J].机电工程, 2005 (10).
[2] 浣喜明, 姚为正.电力电子技术[M].北京: 高等教育出版社, 2004.
[3] 李玮, 赵江, 刘建业.一种使用的单片机控制的数字式调速系统[J].吉林化工学院学报, 2002.
[4] 王侃夫.数控机床控制技术与系统[M].机械工业出版社, 2002.
