卡尔曼滤波技术在潜艇组合导航中的应用研究
2012-07-03杨彦涛李光磊
杨彦涛 李光磊
(1. 海军驻武汉四六一厂军事代表室,武汉 430085;2. 海军驻九江地区军事代表室,江西九江 332007)
0 引言
潜艇因其具有隐蔽性能好、机动能力强、突击威力大等特点,自诞生之日起,就以其独特性能而被誉为“水中蛟龙”,并在战争中发挥着日益突出的作用,大有主导未来海战之势。潜艇为了发挥其自身强大的优势,必须具备高精度导航定位的能力。在复杂的海洋环境中执行任务,有时还可能遭遇敌对环境,高精度的导航定位不仅是潜艇获取有效信息的必要条件,而且决定了潜艇是否能够顺利完成任务、安全返回。因此,高精度的导航定位是潜艇研究的关键技术之一。
采用多传感器信息融合组合导航是目前通用的高精度导航模式。组合导航系统与单独导航系统相比,具有较高的导航精度和较好的容错性能。实现组合导航有两种基本方法:回路反馈法和最优估计法。其中,以状态空间分析法为基础,以卡尔曼滤波为代表的最优估计法应用最为广泛,也最为典型。由于潜艇组合导航的系统模型本质上具有非线性特性,当前多采用EKF进行处理。EKF实质上是对非线性模型进行近似线性化,本文将EKF方法与传统的DR算法进行比较研究。
1 模型建立
针对不同的导航原理,有不同的系统模型。潜艇导航方法依据原理不同主要可以分为三大类:其一,声学导航定位方法;其二,利用地球物理特性进行导航,比如利用重力异常、地磁场导航、测海数据导航、利用海底特征地形的并行匹配定位等方法;其三,以惯性导航为主的航迹推算和最优估计组合导航方法。声学定位方法需要安装声波发送和接收设备,这些设备的安装和标定比较困难,定位的作用范围也有限,因而不适合远距离、长航时、任意海域的潜艇导航。利用地球物理特性进行水下导航是最近几年国外研究的热点问题,理论分析和内场实验结果都显示了这类方法具有很大发展潜力,但是目前技术上还不够成熟,离实际应用还有差距。当前广泛采用第三类组合导航方法,即以惯性导航为主的航迹推算和最优估计组合导航。本文就针对这一类组合导航方法展开分析和研究。
水下组合导航建模需要考虑的因素很多,外部环境不确定性很强。如果把每个方面都纳入到模型中,必然会导致模型极其复杂,以致不可用。在研究中,需要对实际问题进行适当简化,使模型既能够比较准确地反映真实系统的状态,又便于分析研究我们所重点关注的问题。据此,我们只选取了有代表性的潜艇位置、速度、方位角、方位角速度作为系统的状态,而不考虑洋流干扰、陀螺漂移、位置误差、速度误差、标定误差等物理量。上述状态取舍还考虑到了当前典型的潜艇导航的多传感器组合方式,即GPS/ DGPS+INS:/磁通量罗盘+DVL。其中,GPS/DGPS(差分GPS)提供准确的初始位置,INS/磁通量罗盘测量方位角和方位角速度,多普勒速度计测量潜艇相对于海底的速度。仅考虑潜艇在固定水深航行,模型可简化为在二维平面内的运动,如图 1所示。设:潜艇的位置 x 、y,方位角ψ,方位角速度 r,沿潜艇纵轴方向的对地速度u,垂直于纵轴方向的对地速度 v,潜艇导航模型则可建立如下非线性状态方程:


式中,


图1 可表示为线性形式
2 DR算法和EKF滤波
航迹推算(DR)是常用的一种数据融合方法,它采用惯性传感器和里程计(速度计)等装置估计载体的位置和航向。航迹推算的基本原理是:通常物体的运动可以近似看作是在平面上的二维运动,如果已知物体t时刻的位置和航向,还可以测量从kt时刻到1kt+时刻这段时间间隔内的速度和航向角变化率,则可以计算1it+时刻的位置和航向。已知初始位置和航向,依次递推,就可以计算出任意时刻的位置和航向。

考虑到实际情况,可将(3)式改写为:

其中:θi是ti时刻的航向角(和北方向的夹角);di是 ti时刻到 ti+1时刻物体行驶过的距离。
航迹推算的特点是原理比较简单,易于实现,具有短时间内定位精度高的特点,但定位误差随时间积累而变化严重。因此,应用最优估计方法对系统进行滤波处理,能够有效提高系统的定位精度和可靠性。目前常用的滤波方法是扩展卡尔曼滤波(EKF)。其主要思想将非线性方程近似线性化,实际应用中还要考虑离散化的问题。其基本公式如下:
对于离散化后的非线性系统:

EKF有以下的递推公式:

其中,

通过上述分析,可进行计算机仿真研究,以进一步比较EKF方法和DR算法在潜艇组合导航中应用的性能。仿真结果如图2、3、4、5所示。

图2 DR东向位置定位误差
3 结论
由仿真结果可以看出,针对两个方向的位置定位误差,EKF的状态估计精度都相对较高,滤波效果明显。

图3 DR北向位置定位误差

图4 EKF东向位置定位误差
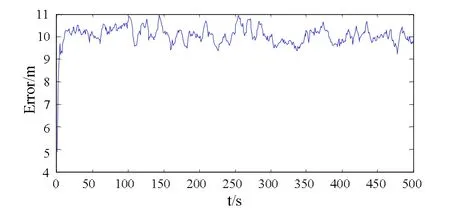
图5 EKF北向位置定位误差
[1]赵亦林(美). 车辆定位与导航系统[M]. 北京: 电子工业, 1999.
[2]周永余, 陈永冰, 李文魁. 舰船组合导航系统发展评述[J].中国惯性技术学报, 2003, 11(1): 67-72.
[3]吴美平, 胡小平. 惯导/GNSS/罗兰/航姿系统组合导航方案[J]. 中国惯性技术学报, 2000, 8(4).
[4]陈刚, 庄良杰. INS/GPS/CNS组合导航系统的自适应滤波技术研究[J]. 中国惯性技术学报, 2000, 6(8):16-20.
[5]付梦印, 邓志红, 张继伟. 卡尔曼滤波理论及其在导航系统中的应用[M]. 北京: 科学出版社, 2003.
[6]董大琼. 基于船舶运动模型的组合导航定位滤波算法研究[D]. 武汉: 武汉海军工程大学, 2009.
