基于笼型异步电机的螺旋桨负载模拟研究
2012-07-03张敬南丛望
张敬南 丛望
(哈尔滨工程大学 自动化学院,哈尔滨 150001)
0 引言
为了使所设计的船舶推进系统满足性能指标的要求,结合螺旋桨模拟装置对推进系统的设计进行演示验证是必不可少的[1]-[4]。螺旋桨模拟装置必须能真实地模拟实际工况下螺旋桨的特性才能对推进系统起到有效的检验。直流电机构建了螺旋桨负载转矩模拟系统为推进系统提供螺旋桨负载模拟转矩取得了很好的效果[5,6]。但是考虑到直流电机自身缺点,在大容量螺旋桨负载的模拟方面受到了限制。而现代电力电子技术及交流电机变频控制技术的迅速发展,基于交流电机变频控制技术来实现大容量螺旋桨负载模拟技术的研究成为可能。作者基于三相笼型异步电机进行螺旋桨负载模拟的研究,对三相笼型异步电机的转矩矢量控制策略进行了研究,构建了基于转子磁链定向的三相异步电机的转矩控制系统。结合螺旋桨负载转矩的数学模型,在MATLAB/Simulink仿真环境下进行了螺旋桨典型工况的仿真研究,探讨了采用三相笼型异步电动机进行船舶螺旋桨负载转矩模拟的可行性。
1 异步电机转矩矢量控制
1.1 基于转子磁链定向的异步电机数学模型
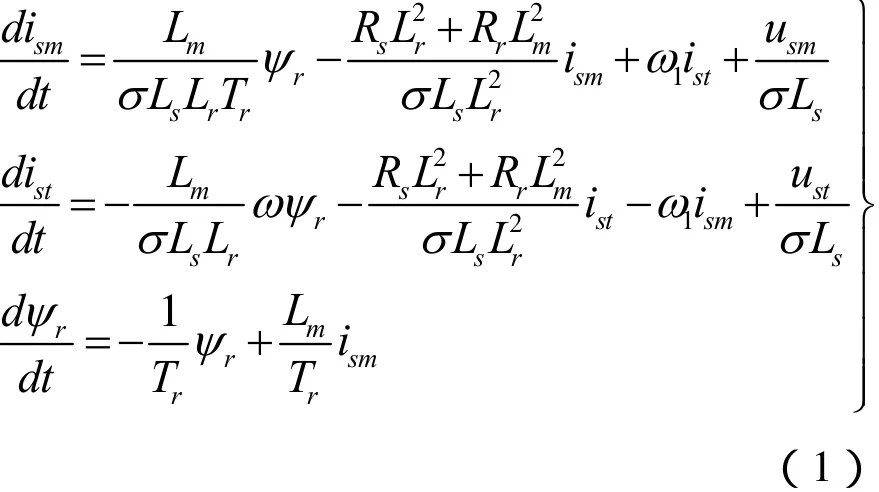
实现矢量控制的基本思想是通过坐标变换获得等效的直流电机模型,从而实现电磁转矩与磁链的分别控制,分别获得转矩分量和磁链分量的控制值,然后将转子磁链定向坐标系中的控制量反变换得到三相坐标系的对应量,以获得实际系统的控制参数。矢量控制采用基于mt旋转正交坐标系下的异步电动机数学模型[7]。设定m轴沿着转子总磁链矢量 Ψr的方向,t 轴与矢量 Ψr正交。mt旋转正交坐标系笼型异步电机状态方程为
转差角速度

坐标系的旋转角速度

角位移θ与坐标系的旋转角速度的关系为

由于 ψr的方向定义为 m 轴,故 ψr=ψmr,且 ψtr=0。电磁转矩为

1.2 转矩闭环矢量控制策略

图1 异步电机转矩闭环矢量控制策略框图
基于转子磁链定向实现了异步电机的矢量解耦,为磁场和转矩的控制提供了方便,基于转子磁链定向的异步电机转矩和磁场闭环矢量控制策略的原理框图如图1所示。转矩控制环和磁链控制环均采用了具有电流闭环控制的双闭环结构形式。图中,ATR为转矩调节器,转矩调节器的输出是电流转矩分量给定值;AΨR为磁链调节器,输出是电流励磁分量给定值;ACTR为定子电流转矩分量调节器;ACMR为定子电流励磁分量调节器。电流环控制的作用是将检测到的电流进行3/2转换,得到mt坐标系中的电流ism和ist分别与给定值作比较,并设计调节器构成电流闭环,电流调节器的输出是mt坐标系下定子电压的给定值,经过反旋转变化获得静止两相坐标系的定子电压值,再通过控制逆变器获得输出三相电压。
异步电机转子磁链的检测基于 mt坐标系的电流与磁链关系确定,即根据式(1)中第三式和式(2)~式(4)来确定转子磁链的大小和空间位置。
2 螺旋桨负载转矩模型
螺旋桨推进器的作用是把原动机的转矩转变为用以克服船舶运动水阻力的推力,推进器通过把水推向反方向而得到船舶前进的运动。根据螺旋桨的工作原理[8],定义螺旋桨的进速为螺旋桨相对于水的轴向前进速度为

式中,Us为在船速,单位m/s;w为伴流系数,是考虑船在水中航行时产生对螺旋桨的伴流影响而引入的系数。
小米以“高配置、低价格”的概念迅速吸引大众眼球,形成小米的竞争优势。低价高品质符合手机发烧友的胃口,这一新的理念也让小米手机在市场上迅速占有一席之地,获得了可观的利润。
定义进速比修正值'J为

式中: Dp为螺旋桨的桨径,单位为m;n为螺旋桨的转速,单位为rps。
其轴向推力P和阻转矩Mp可表示为
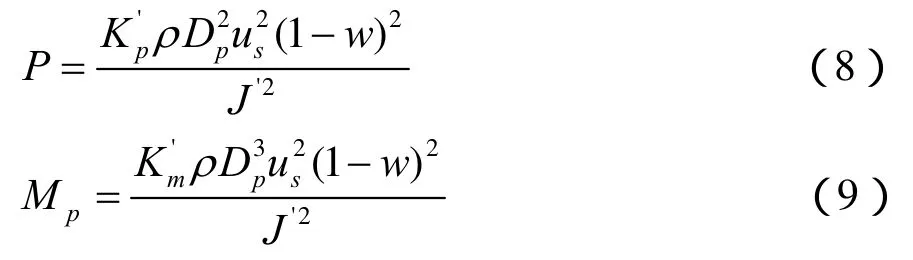
式中:ρ为海水密度,单位为 kg.s2/m4;Kp,Km分别为螺旋桨的推力系数和阻转矩系数。相应的推力系数和阻转矩系数也变为修正值,对应曲线和曲线
根据式(9),螺旋桨负载转矩的大小与船舶的航行速度是有关的。当只考虑船舶的直航运动时,船舶运动方程为

式中:m为船体质量;k为附连水系数;Rf直航运动船舶所受阻力;t为推力减额系数,是考虑螺旋桨工作时使船体总阻力增加而引入的系数。
综上,可得到船舶直航推进时考虑船桨相互作用的螺旋桨负载转矩计算框图如图2所示。

图2 螺旋桨负载转矩计算框图
为了突出螺旋桨负载模拟技术的研究重点,图谱采用典型曲线数据进行拟合,重点研究船舶起航及反转过程中螺旋桨负载转矩所体现的起航特性和反转特性。
3 螺旋桨负载转矩模拟装置仿真
基于图2所示控制原理框图构建螺旋桨负载转矩模拟系统的仿真程序。
螺旋桨负载模拟系统采用的模拟电机为异步发电机:额定功率160 kW,额定电压400 V(Y接),额定电流331 A,频率30 Hz,额定转速444 rpm。定子绕组电阻 0.0138 Ω,转子绕组电阻0.00773 Ω,定、子漏电感0.152 mH,激磁电感7.69 mH。螺旋桨推进装置采用基于转速矢量控制的异步电动机推进系统,本文不作介绍。推进系统及螺旋桨的转动惯量1972 kg⋅m2。结合螺旋桨推进系统起动及反转过程进行螺旋桨负载转矩模拟装置的仿真,仿真曲线如图3和图4所示。
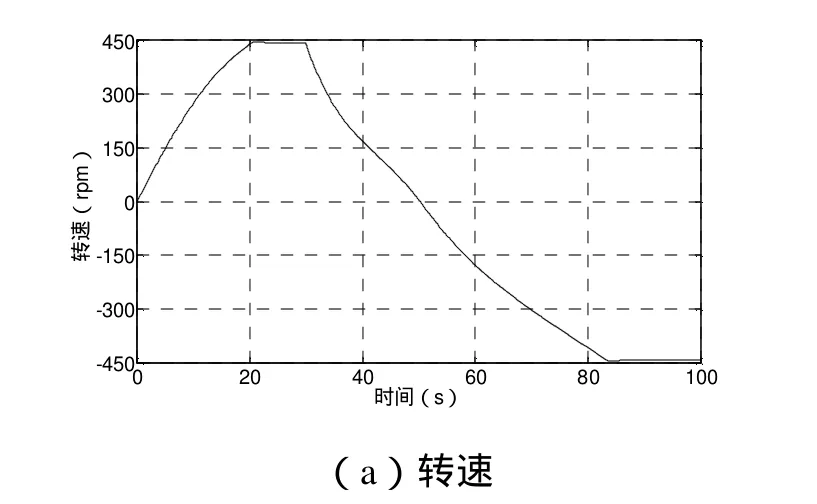
图2 考虑船桨相互作用的螺旋桨转矩模型
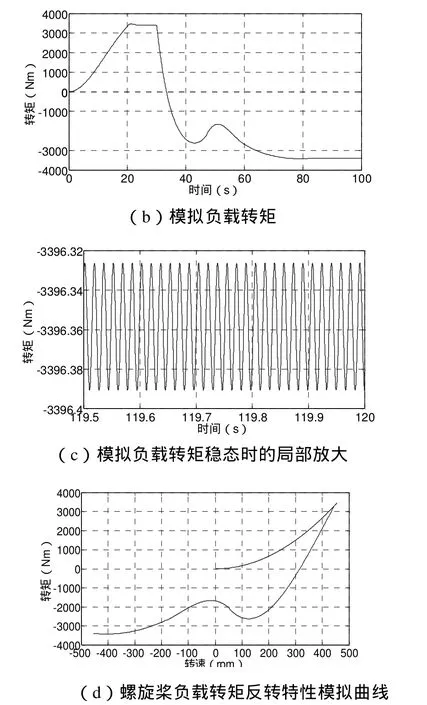
图3 转速与模拟负载转矩曲线
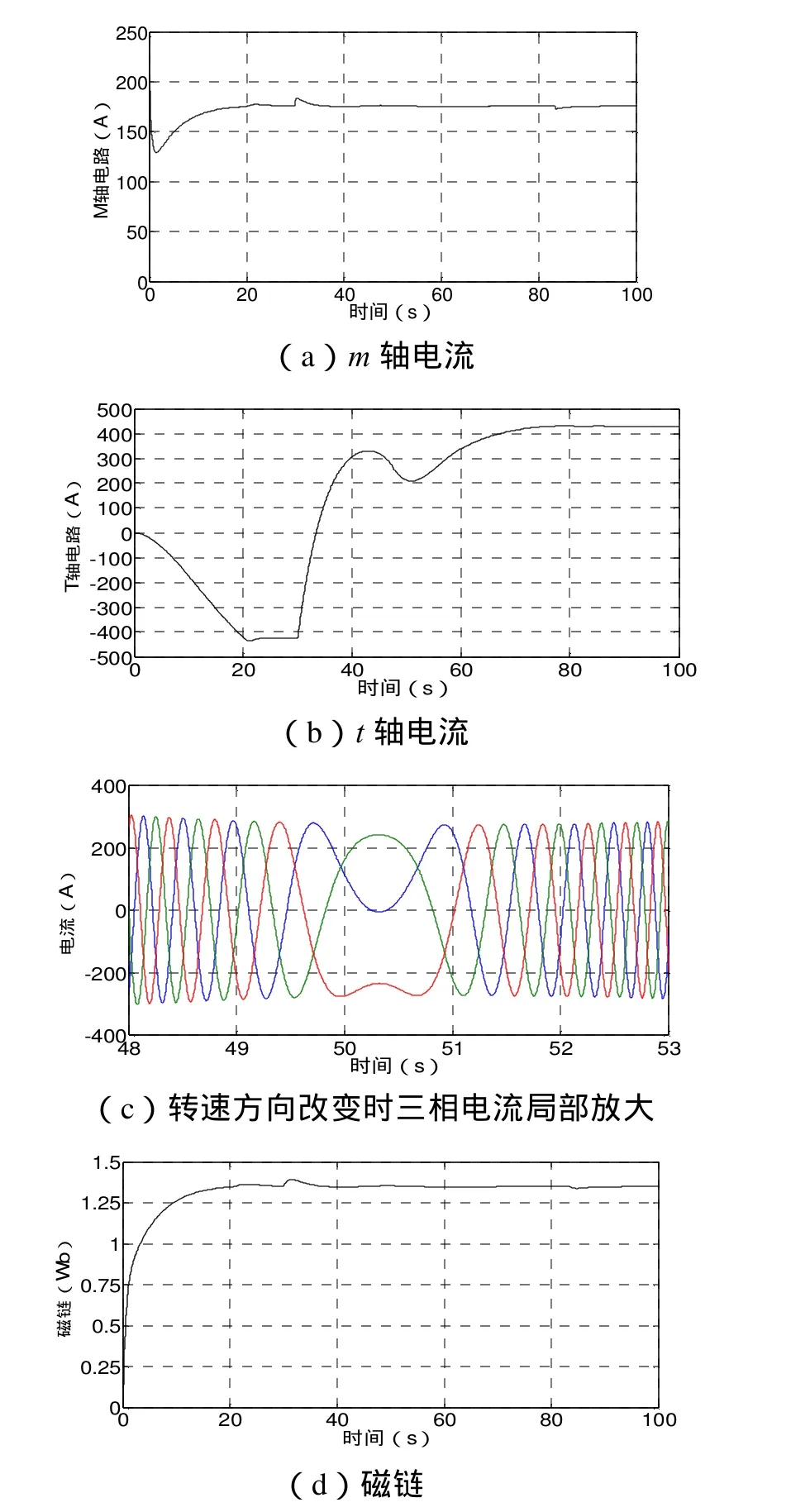
图4 螺旋桨负载转矩模拟过程中的电流与磁链
根据图3所示,在螺旋桨起动及反转过程中,转矩负载模拟电机正确的模拟出负载转矩情况,恰当的选择调节其参数,可以获得较好的转矩跟随性能,转矩震荡也较小。根据图3(d)螺旋桨负载反转特性的模拟中,反转特性从第一象限(推进系统正向电动机状态)到第四象限(推进系统回馈制动状态),以及第四象限到第三象限(推进系统反向电动状态)的过渡平滑,没有发生反复的震荡现象。
根据图4所示,m轴电流、t轴电流体现了正确的变化形式,定子电流的励磁分量(m轴)建立磁场后,受扰动波动较小,磁链波形较为稳定,如图4(d)所示。当负载模拟电机被拖动正向旋转时,负载模拟电机提供制动转矩时,t轴电流小于0;减速过程中,推进系统出现了回馈制动,负载模拟电机提供驱动转矩,t轴电流大于0;当转速过零且反向旋转时,负载模拟电机提供制动转矩,但是根据图4(c)所示,此时负载模拟电机三相电流相序反向,即负载模拟电机的旋转磁场方向反向,所以t轴电流依然保持大于0的状态。
4 结论
通过采用鼠笼式异步电机的转矩控制实现转矩负载的模拟,结合船舶螺旋桨负载转矩特性进行了转矩负载模拟的仿真研究,仿真曲线正确且满足特性要求,验证了基于转矩矢量控制的笼型异步电机进行螺旋桨负载转矩模拟的可行性。
本文研究所采用的转矩矢量控制的思想基于电动机速度调节矢量控制的思想,控制算法和控制器设计简单;磁链闭环和转矩闭环均采用双闭环形式,通过引入的电流内环,实现了限幅保护并加快了跟随性能。
本文研究成果可以为大功率转矩负载模拟的实现提供了理论依据和设计方案,有助于大功率船舶陆上联调实验室的建设及其他机械负载模拟系统的构建。
[1]贺慧英,沈建清. 舰船电力推进负载试验技术研究[J]. 哈尔滨工程大学学报. 2009, 30(4): 83-89.
[2]马伟明. 电力集成技术[J]. 电工技术学报, 2005,20(1): 16-20.
[3]LITTLE G T, YOUNG S S, NEWELL J M. The electric warship Ⅶ : the reality[J]. Journal of Marine Design and Operations, 2003(2): 3-16.
[4]Ren W., Steurer M., Woodruff S. Progress and challenges in real time hardware-in the loop simulations of integrated ship power systems[J].Power Engineering Society General Meeting, 2005.IEEE. 2005: 534~537.
[5]陈实如, 李殿璞. 船用螺旋桨负载动态仿真装置研究[J]. 2001.22(2): 37-40.
[6]刘勇.一种能模拟螺旋桨特性的新型负载模拟装置的研制[J]. 黑龙江工程学院学报, 2002(16): 30-32.
[7]阮毅, 陈伯时. 电力拖动自动控制系统(第4版)[M].北京: 机械工业出版社, 2010.
[8]李殿璞. 船舶运动与建模(第 2版)[M]. 北京: 国防工业出版社, 2008.
