CSTR模型中非线性因素线性化的分析
2012-07-03王宗刚刘春元
王宗刚,史 军,刘春元
(河西学院 物理与机电工程学院,张掖 734000)
0 引言
过程的抽象与仿真对学术研究是有重要意义和实用价值的,因为我们可以通过采用不同抽象方式和实施不同控制策略来比较出某一模型在辨识、控制器设计和该系统的故障诊断等不同应用领域采用不同处理方法的优劣,从而针对特定工业应用环境选取最优解决方案[1]。本文描述了一个不带有化学反应的连续搅拌加热装置(CSTH)的基本模型,从容积平衡和热平衡两个方面结合实验数据以代数方程的形式推导出模型,其中通过实验测量到得数据是来自安装在实验装置的传感器和一些执行机构获得的,其他一些未知的如通过加热线圈产生的热传递量、加热装置本身体积对加热对象的体积和液位关系的影响等这些特征量在实际应用中是不能被完全忽略的,但这类关系大部分又含有显著的非线性因素和较强的约束条件,这是此类模型辨识的一个难点。一个有价值的特征量应该是对模型采用测量方式得到而不仅仅是模拟其产生的噪声和干扰来获得,因此本文提出的方式是选用一个真实的平台来作为大量数据的识别和处理基础[2,3],结合实验在Simulink中的仿真平台下给出的模型主要是考虑到后续研究的易操作性,下面做详细介绍。
1 过程描述与模型建立
1.1 CSTH装置
本文采用的实验平台是一个体积为3.5L、高20cm的正方体形可进行简单的冷、热水混合的反应装置,结构如图1所示,假定CSTH中能够混合完全,即反应器中反应物的温度和外流体的温度一致。CSTH中的冷水(CW)和热水(HW)都通过一个10psi的泵增压后注入容器,气压传动装置的控制阀可提供压缩空气。测量部分采用了孔板式微分压力变送装置作为流量仪,液位仪采用微分压差测量方式,温度测量是靠安装在管道出口处的热电偶获取,这些测量装置都可提供4mA~20mA的输出信号。
图1(a)为实验平台的一部分(为使图看得比较清晰,未放入搅拌装置和加热器插件),图1(b)为基本工作示意图。
1.2 容积和热平衡方程
容积和热的动态平衡可用下面的方程表示:

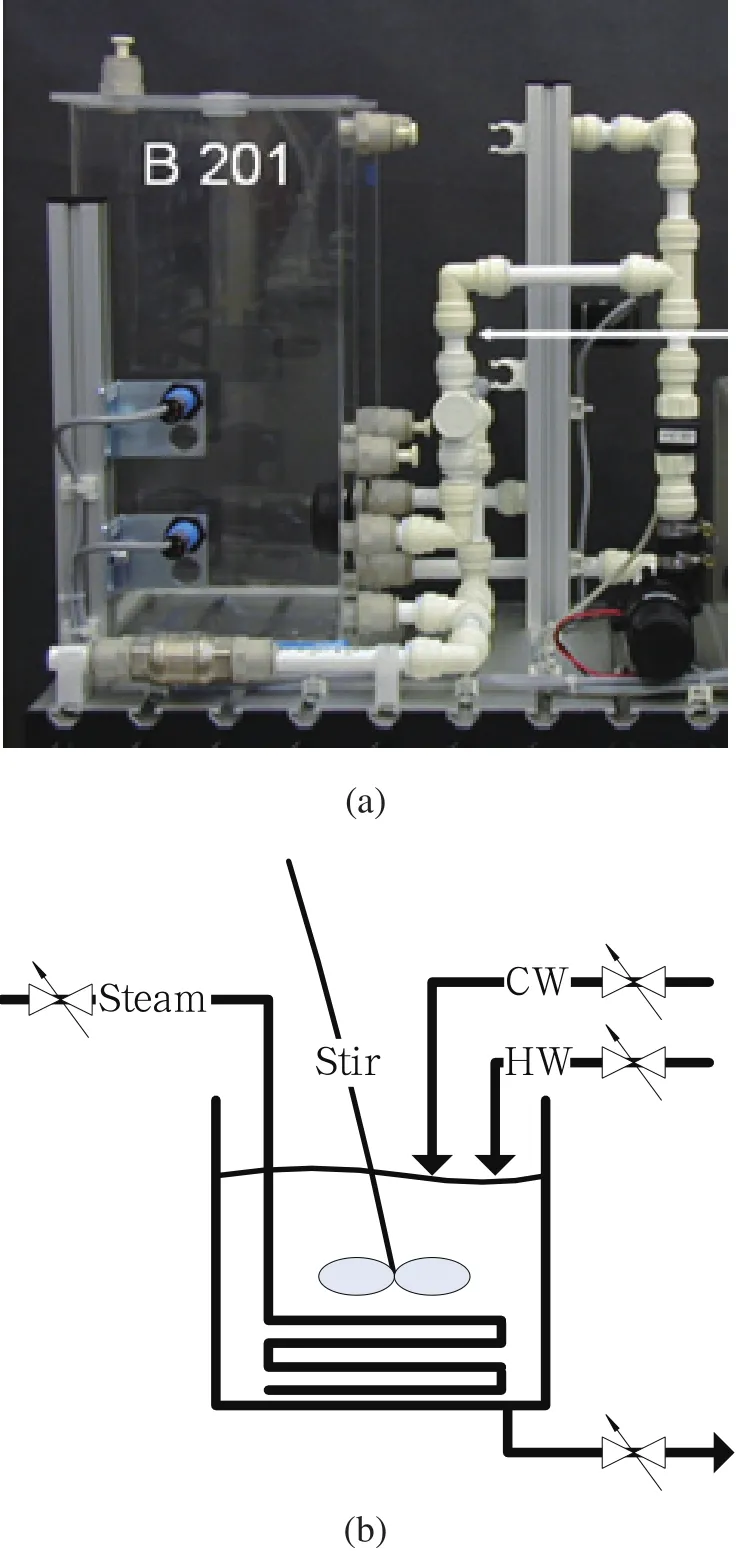
图1 CSTH模型实验装置和示意图
其中x表示液位,V是反应器的容积,fhw为流入反应器的热水的流量,fcw为流入反应器的冷水的流量,fout是反应器出口的流量,H是反应器的整体焓;hhw提供的热水的焓;hcw提供的冷水的焓;hout反应器出水的焓;ρcw是加入的冷水的密度;ρhw是加入的热水的密度;ρout是反应器流出水的密度;Wst是来自蒸汽的输入热量值。
1.3 其他方程
接下来给出其他参量的代数方程推导。比热焓:假定混合充分的情况下,有

液位x表示:反应器底部安装的加热线圈占据了一部分体积,因此,反应器的液位和体积的关系是非线性的。
出口流量表示:将手动输出流量阀混合比为50%作为标准运行状态,在这个标准设置下,给出的是根据实验测得的一个水的高度(cm)和上面提到的手动流量阀测得流量(m3/s)的平方根关系

热力学性质描述:流动液体中比热焓、密度、温度之间的关系及数值用于h和T的转化、T和q分段查表线性化,其中比热焓参考值为0°C。
蒸汽系统热传递:蒸汽系统的热传递是依靠蒸汽阀的开度控制的,因为热交换区域的热传递系数是一个不可获得的量,所以这种关系是通过从稳态起设定不同的蒸汽阀开度一一测定而得到的实验数据,当CSTH在一个稳态时只流入冷水的热平衡方程为:

fcw=fout是稳态,Wst的计算如表1所示,试验中稳态的流量为2.04×10-5m3/s,流入的冷水温度为20°C,hcw=101kJ/kg ,ρcw=998 kg/m3,上述计算结果用于分段线性化查表,针对一个给定的蒸汽阀的开度给出一个蒸汽热度,数据表1可用于非稳态条件下模拟。先做如下假设:1)假定反应器混合完全,出口温度与内温度一致;2)假定由蒸汽阀开度确定的热传递量不依靠反应器内水的温度;3)假定在所有的蒸汽凝聚的情形下多余的蒸汽对反应物不造成影响。
1.4 传感器和开度阀的校准
输入CSTH的用于加热的蒸汽以及冷水阀输入量通过测量转变为4mA~20mA范围的电信号,输出的温度和液位测量值如表1所示。

表1 热传递与蒸汽阀开度的关系
冷水流量仪在4mA-20mA范围内,通过分段查表线性化得到校正模型,液位仪校准可转换反应器液位为输出量4mA-20mA的信号,而体积校准只是给出一个查表转换的等级。由于加热线圈占据了反应器底部的一定空间,当液位达到7cm时为加满状态,当液位比较低的时候,容积和液位的比值特性就会表现为非线性。冷水阀对应信号20mA时表示阀完全打开,4mA对应完全关闭,流量可通过当输出完全关闭时观察反应器通过已知水阀充满时所用的时间来计算,热水阀过大和校准超过12mA在实际应用中是不可能的,因为此时反应器会溢出和飞溅。冷水流量仪的校准在4mA~20mA范围内都是线性的,但是当阀全部打开测到的冷水流量的最大值会超出4mA~20mA的范围,这种校准的误差也会在CSTH的simulink仿真中体现出来。经阶跃测试,冷水阀的动力学模型为带有延时的一次时滞,延时为1s,阀的时间常数为3.5s,即阀门的传递函数为

这里的MV(s)为阀的开度,OP(s)为阀需求信号对应的开环控制器输出。
1.3节中设定了反应釜内液位和通过输出管道流量的关系:

表达式中的参数m和c取决于校正中最佳直线的斜率和纵坐标截距,它给出的是fout依据的构造量,这里的x是反应器中的液位(单位cm),实验方法选用了闭环控制。
2 仿真
2.1 仿真平台
CSTH模型方程的数值解需要基于方程的仿真器,因此本文中在Simulink中做了仿真。
2.2 输入和输出
模拟输入输出采用4mA~20mA的电信号表征,输入量为CW,蒸汽阀需求量为HW,输出来自液位测量、冷水和热水流量及温度测量的值,仿真的目的在于确定规定时变或稳定输入下的输出动态响应。通过查表将4mA~20mA的信号量CW和HW转换为fcw和fhw(单位m3/s),蒸汽阀需求量转换为蒸汽焓的流速(单位kJ/s),输出量的校准也通过查表转化,水流速率、温度均为4-20mA的值。
2.3 加热和体积平衡
容积平衡变换为体积的冷水进入量的当前值,液位和出口流量综和为式(1),体积和出口流量成为带有蒸汽阀设定和冷水进入量的热平衡模型的输入,热平衡模型综和为式(2),当温度已由式(3)结合查询水的热力学性质分段线性表确定。
2.4 控制器构建
控制系统直接采用提供的输入输出量应用Simulink构造了闭环控制模型。过程控制标准形式的比例-积分控制器如下:
其中Kc是控制器增益,τis是积分时间,PI控制器通过Simulink提供,相比之下,需要控制和积分器增益规范如下:
其中P=Kc,I=Kc/τis。
3 线性化
3.1 工作标准
多数文献的仿真实例提到了状态空间模型或者由矩阵表示的传递函数[4~6],这些形式使得搅拌加热器线性化模型可以更容易的应用到多变量控制设计和分析中,现假定有两个线性化的工作点,一个是只带有冷水流入的搅拌器加热模型,另一个是冷水和热水流入都包括的情形。每一种情形下,稳态时阀的位置和仪器条件由表2给出,线性模型中的变量离操作点略有偏差,冷水阀当温度测量延时为8s时会有1s的延时。
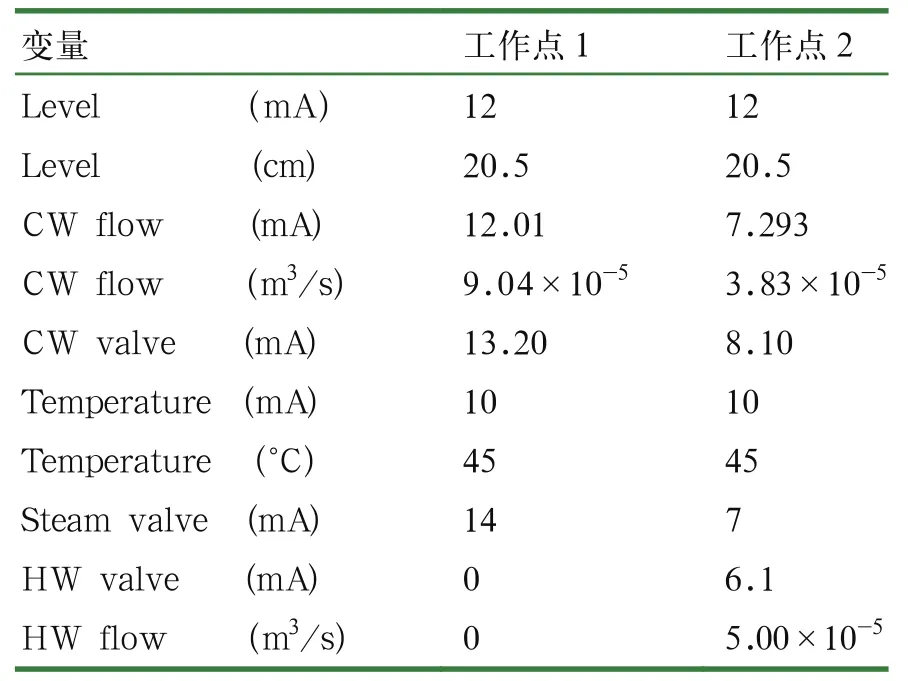
表2 线性化操作点
3.2 工作点1
3.2.1 开环状态空间模型
状态空间模型为:


这里u1是冷水阀位置,u2为蒸汽阀位置,y1为液位测量值,y2为冷水流量测量值,y3为温度测量量,x1为反应釜体积,Eq(1)输出积分,x2为Eq(4)阀门传递函数输出积分,x3为反应釜全部焓,Eq(2)输出焓积分。

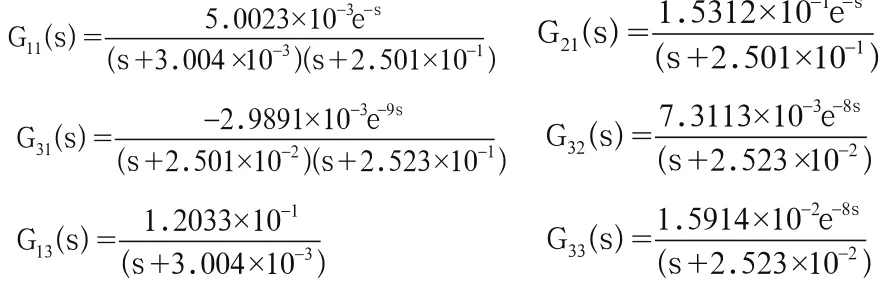
3.2.2 开环传递函数模型
下列形式传递函数模型的U(s)和Y(s)是输入输出变量的Laplace变换向量:

3.3 工作点2
3.3.1 开环状态空间模型
状态空间模型为:

这里u1是冷水阀位置,u2为蒸汽阀位置,u3为热水阀位置,y1是液位值,y2是冷水流量测量值,y3为温度测量值,x1为反应釜体积,Eq(1)输出积分,x2为阀门传递函数Eq(1)输出,x3为反应釜全部焓,Eq(2)输出焓积分。


3.3.2 开环传递函数模型

其中:
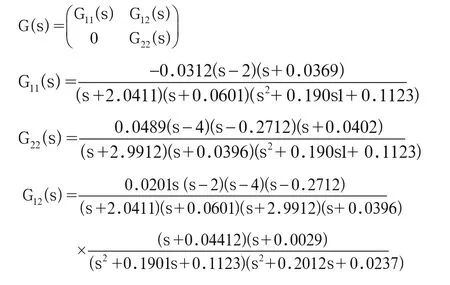
3.4 直接线性化的传递函数模型
4 扰动测试
实验过程的扰动包含了一个确定的振荡扰动的冷水流量速率扰动,一个液位的随机扰动,以及温度测量时混杂的噪声。
4.1 冷水流量扰动
实验设备冷水流量包含一个确定的来自于设备其他地方的周期约为40s的振荡扰动,这个扰动通过测量冷水流经冷水阀时在4mA~20mA范围内中点处被捕获。实验中反应器的出口阀需完全打开,即排空反应器,部分扰动如图2(a)所示,可以反映出振荡的性质。
4.2 气泡引起的液位扰动
实验时由于操作会对反应器内充入压缩空气,这是产生气泡从而扰动反应器内液位的原因,当进、出口阀均关闭且反应器内充满一半时,气泡扰动会在液位仪输出时监测到,该扰动的性质是随机的。
4.3 温度测量噪声
在反应器内充满一半时在温度闭环控制下监测温度测量噪声,会获得高频分量和一些中段低频波动。

图2 实验结果
4.4 带有扰动的仿真
在上述仿真中加入如下的扰动:
冷水流量扰动dcw加在冷水阀位置mvd(t)=mv(t)+dcw,这里mv是阀传递函数的时域输出。
液位扰动xd变为:

温度噪声转变为dT,热平衡噪声温度测量Td下的温度计算,H可通过Eq(3)和查表得到水的热力学性质:

5 结束语
本文已对测量仪器、制动器和操作过程的非线性给出了较为详细的描述,得出的线性状态空间和传递函数模型可用于线性多变量控制器设计和其他活动的近似线性,得出的模型和实验数据均具有实际操作性,可在进一步的系统辨识工作中根据具体情况加以改进或直接应用。
[1] D.Chen,D.E.Seborg,Relative gain array analysis for uncertain process models,AIChE Journal,2008,48:302–310.
[2] R.Chen,K.Dave,T.J.McAvoy,M.Luyben,A non-linear dynamic model of a vinyl acetate process,Industrial and Engineering Chemistry Research,2003,42:4478–4487.
[3] R.Dixon,A.W.Pike,Alstom benchmark challenge II on gasif i er control,IEE Proceedings-Control Theory and Applications 2006,153:254–261.
[4] 李新卫.连续反应釜温度控制系统的设计与仿真[J].化工自动化及仪表,2010,37(11):19-22.
[5] A.Singhal,D.E.Seborg,Evaluation of a pattern matching method for the Tennessee Eastman challenge process,Journal of Process Control,2006,16:601–613.
[6] 丁香乾,杨晓黎,杨华.非线性CSTR过程预测控制器设计[J].控制工程,2009,16(2):146.
