四足机器人运动学分析及步态研究
2012-07-03吴振华刘维平刘西侠
吴振华,金 毅,刘维平,刘西侠
(装甲兵工程学院 机械工程系,北京 100072)
0 引言
在复杂的崎岖路面下,四足步行式机器人表现出有较好的稳定性、机动性、高效性和地形适应性,其能满足野外作战行动、救灾探险、运输保障等多军事任务的需要[1]。
本文以四足机器人为对象,提出了基于仿哺乳动物结构的平台构型,进行了腿部机构的正逆运动学求解,研究两种负载因子下的直行起步到稳定行走步态,计算稳定裕度并进行对比研究。
1 平台机构模型建立
本文所研究的某型四足机器人是基于仿生学的理念进行设计,腿部结构的设计对机器人整体灵活性和行走能力有重要影响。
针对典型的犬类哺乳动物骨骼[2]进行分析,犬类动物的腿部关节常采用对顶的配置方式,如图1(a)所示,其主动关节包括髋关节(两个转动自由度)、膝关节和腕关节,可确定如图1(b)中四个关节自由度配置方案:髋关节横摆、髋关节前摆、膝关节前摆、腕关节前摆,另外末端为弹性阻尼元件。
为满足简化结构、紧凑布局和承载大瞬间负荷等要求,腿部关节选择液压缸作为执行单元,并在每个旋转关节安装有液压缸的位移传感器、力传感器,阀的压力、流量传感器等。腿部由各液压缸形成的多连杆机构能实现抬迈腿运动。
2 正运动学计算
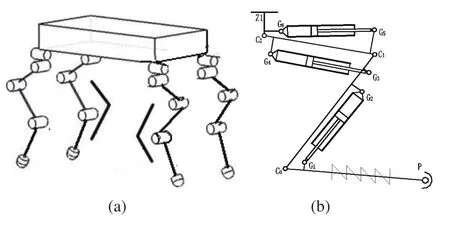
图1 哺乳动物机体仿生简化模型
机器人通过控制各缸的伸长来调整整个腿部及躯体的位置和姿态,以实现运动空间内的运动,笔者通过研究采用D-H法计算正运动学解。
针对腿部串联开链的特点,本文采用D-H法建立腿部坐标系,如图2所示,建立坐标系作出如下定义:坐标系 ,躯体腿部连接点为O点,躯体前进方向为Z轴,垂直向下为X轴,由右手法则可知指向躯体内侧为Y轴[3]。
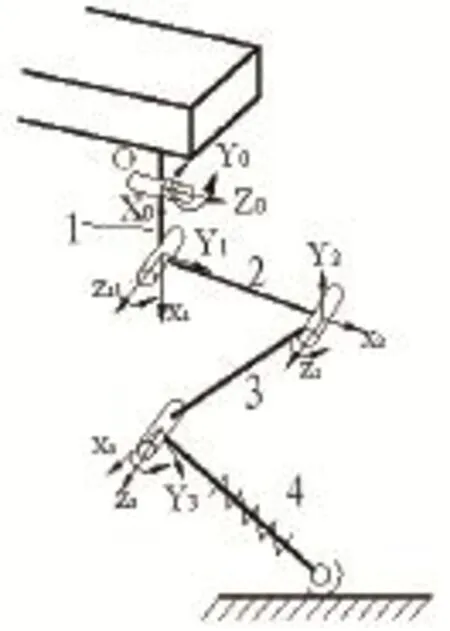
图2 单腿机构简图
在各杆件上建立坐标系,各坐标设定腿部各关节点为 (i=0,1,2,3),利用其次变换描述其相对位置关系,并得出步行腿的D-H参数如表1所示。
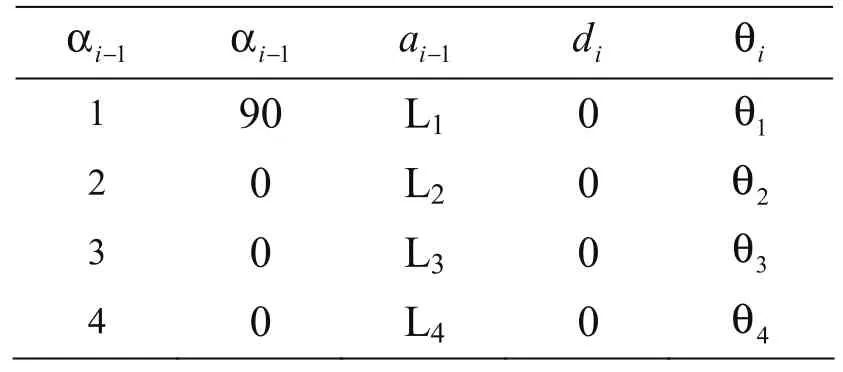
表1 机器人腿部D-H参数
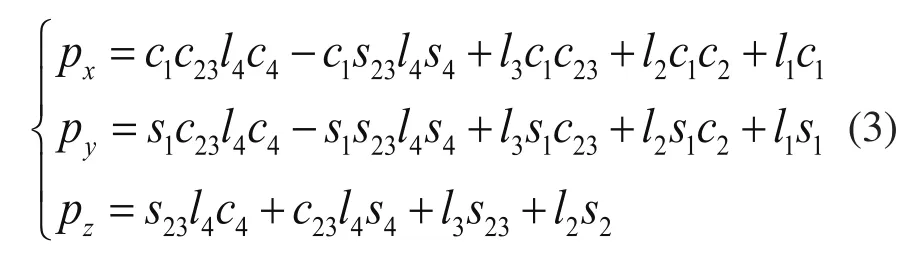
从机体坐标系到足底末端坐标系的转换矩阵为:
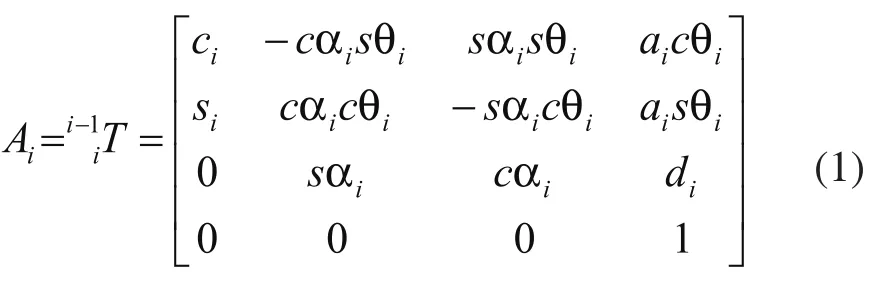
下面建立正运动学方程,由表1可求解足底末端变换矩阵:

由(4)式可求出足底末端在X轴、Y轴、Z轴上投影值分别为:各腿节长度,
3 逆运动学计算
在研究腿部的运动轨迹时,必须求解出运动学的逆解,并将关节角度换算为为液压缸的位移变化,其即为驱动系统的输入量。
对于多连杆串联型机构的逆解一般采用分离变量法进行求解[4],且通常有多个逆解,笔者采用图解法进行求解:
对于绕Z轴的侧摆角度θ1有:

髋部夹角θ2=c(常值),考虑躯体灵活性选择θ2=45o[5]。
根据图3的尺寸关系,可列出方程组(5)

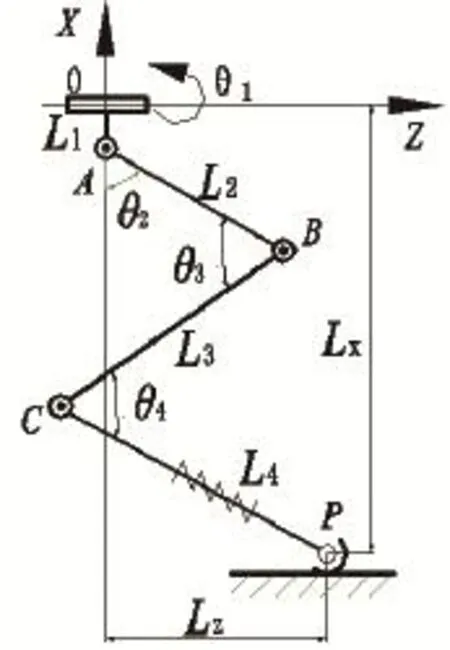
图3 腿部个尺寸参数
4 步态研究
不同四足哺乳动物在不同的运动状态下差异是非常大的,下文针对平地下两种负载因子的直线行走步态进行比较。
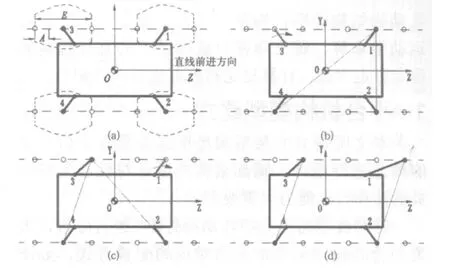
图4 起步调整步态1(β=5/6)
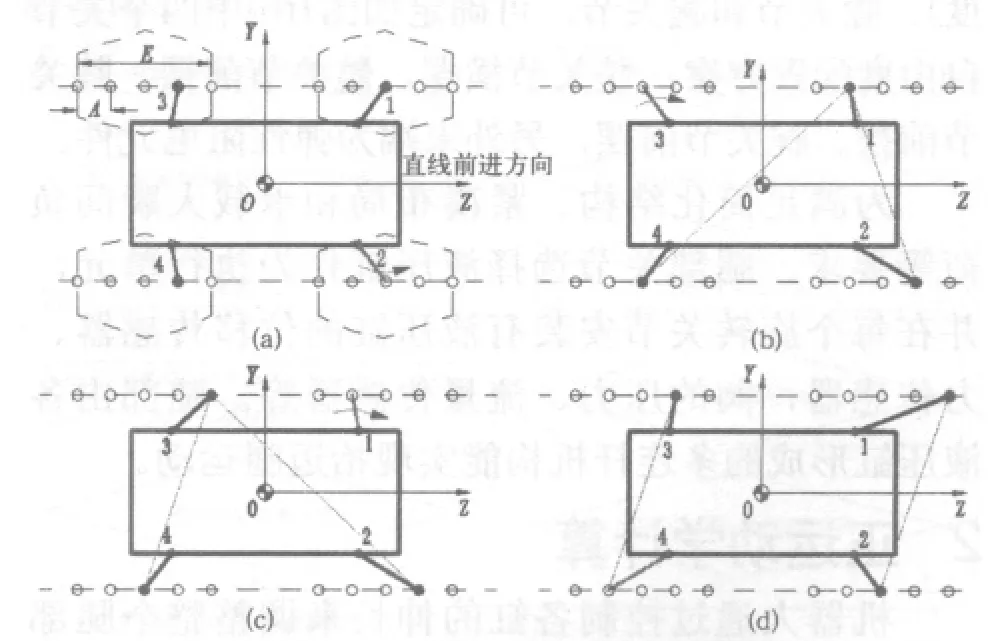
图5 起步调整步态2(β=4/5)
图4、图5分别表示由站立相到周期行走的起步调整过程。图4、5(a)均为站立相状态,(b)、(c)、(d)均为步态调整的过程,黑色点连线区域即表示足端的地面投影区域。
图4中,腿3先向前摆动至最前端,而后腿1摆动,此时重心落于支撑区域内,(d)中表示4条腿支撑的状态,同时躯体向前移动。
图5中,腿2首先摆动一小段距离,而后腿3摆动,此时重心落于三角形支撑区域内,躯体不动,而后腿1摆动至最前点,形成4腿支撑,完成调整过程。
图6表示β=5/6时机器人按照4231时序下的行走步态[6]。周期运动时,依次摆动4231腿,其中出现两次4条腿着地的情况,这种步态的特点是始终有至少3条腿保持支撑状态,且稳定裕度均大于零。摆动腿动作时,躯体不存在因落地腿摆动而导致的重心移动,其运动是非连续的,可认为是一种非连续步态。
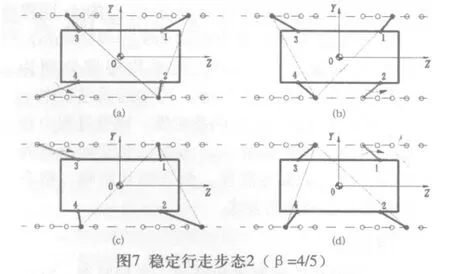
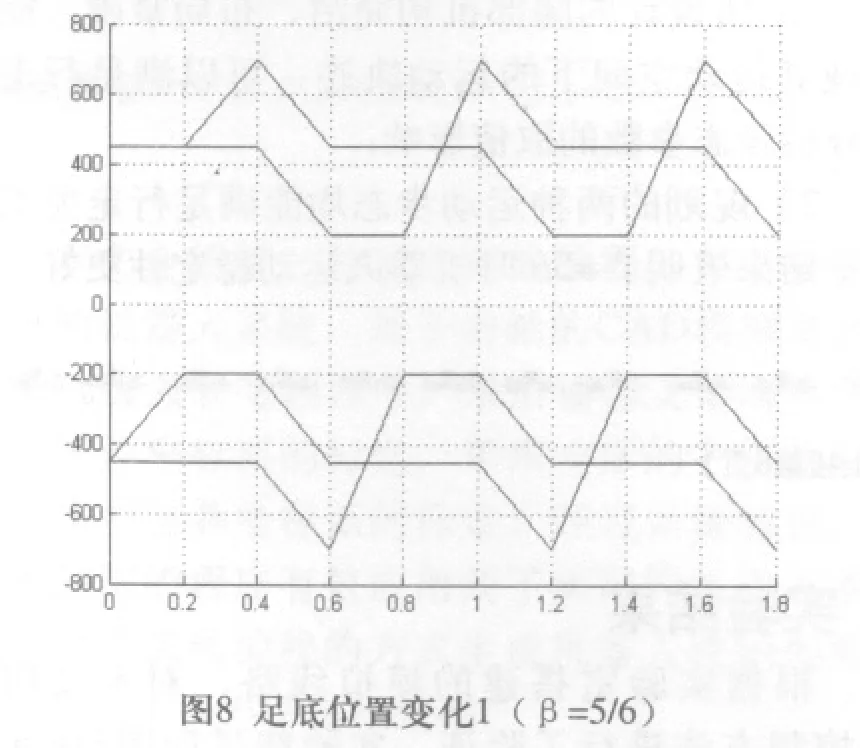
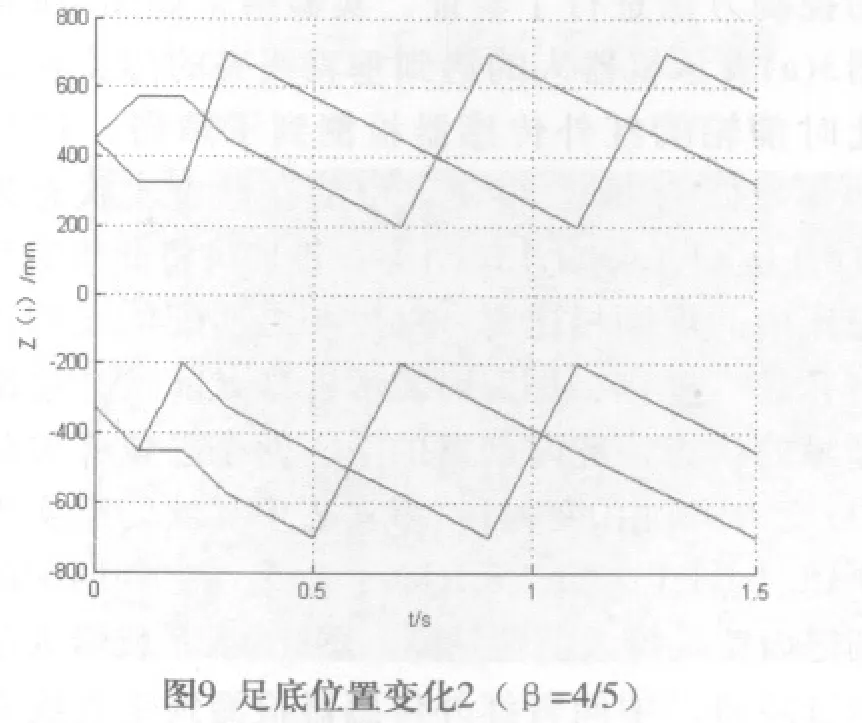
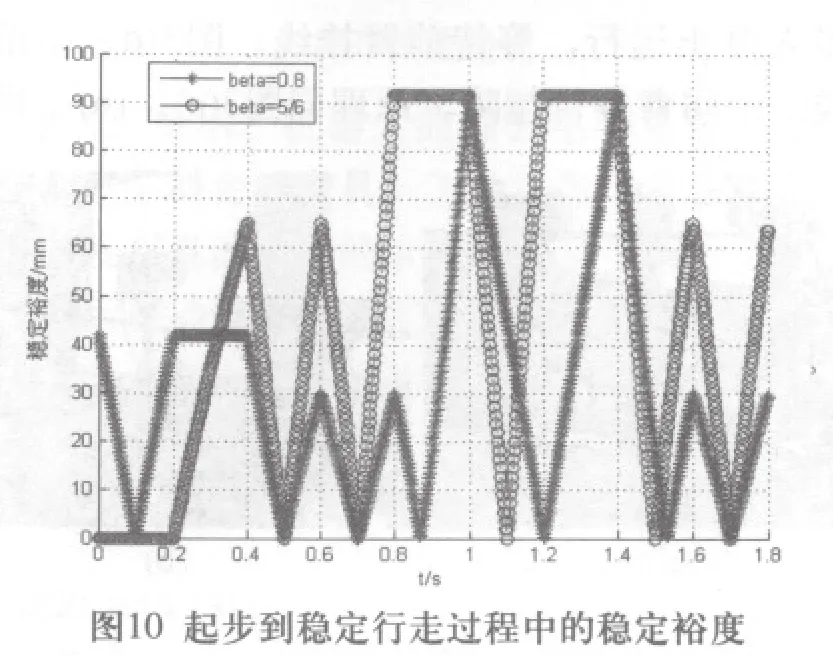
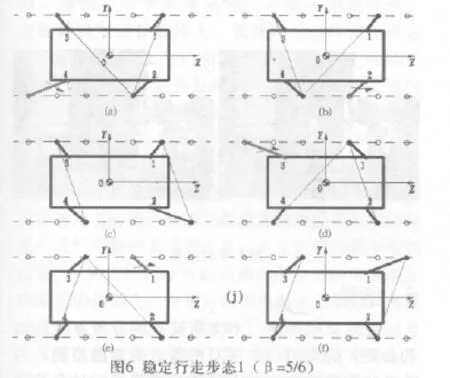
图7所示表示β=4/5时机器人按照4231时序下的行走步态。此种步态下,机器人依次以4231顺序进行一次摆动,摆动时存在至少有3腿着地支撑,其单腿摆动同时机器人重心向前移动,此时躯体运动时连续,这样可提高静步态下的运动速度和移动效率。
由图4~图7的步态变化,可求解Z方向落足点相对重心的位置变化,如图9、图10所示。
利用Matlab计算重心和各点连线的最小距离如图10所示,即稳定裕度S随时间t的曲线。
图10中,起步调整到稳定行走的全过程中,两种步态下的最大裕度均为Smax=91.6mm,最小裕度均为Smin=0mm,而平均裕度分别为S1avg=29.8mm,S2avg=45.1mm,可知运动过程中,β=5/6时的步态具有更好的稳定性。调整过程中存在稳定裕度为零的临界点,考虑腿部摆动造成的重心偏移和运动的连续性,故忽略其影响,整个过程满足稳定裕度的要求。
5 结论
1)所设计的腿部机构简洁、布局紧凑,能够实现其运动空间下的运动轨迹,可以满足行走需要分析步态参数的取值影响;
2)规划的两种运动步态均能满足行走要求,计算结果表明β=5/6时机器人运动稳定性更好。今
后还可针对复杂路面下不同调整步态的灵活性和稳定性开展实验研究。
[1] 王吉岱,卢坤媛,徐淑芬,雷云云.四足步行机器人研究现状及展望[J].制造业自动化,2008,31(2):1-2.
[2] Stanley H.Done,Peter C.Goody,等.犬猫解剖学彩色图谱[M].辽宁科学技术出版社,2007.
[3] John J.Craig.Introduction to Robotics Mechanics and Control(Third Edition)[M].2006,57-59.
[4] 李发忠,赵德安,马从国.FANUC_M-6iB型机器人运动学逆解研究[J].机械设计与制造,2008,(10):174-176.
[5] 王沫楠.仿生机器蟹机构设计及结构参数优化[J].机械与电子,2004,(8).
[6] 徐轶群,万隆君.四足步行机器人稳定性步态分析机器人技术[J].制造业自动化,2001,08:1-3.
