混杂系统稳定性条件扩展及等价分析
2012-07-02李卫东王中科
李卫东,王中科
(大连交通大学 电气信息学院,辽宁 大连 116028)*
0 引言
混杂动态系统(Hybrid Dynamic Systems)是研究同时包含连续变量动态过程和离散事件动态过程的复杂系统,其混杂特性表现为连续变量和离散事件的相互作用[1-2].混杂系统具有复杂性和特殊性,即便每个子系统是稳定的,混杂系统也不一定稳定;相反,如果有的子系统不稳定,那也不代表混杂系统是不稳定的[3].稳定性分析及综合是控制系统研究的基本问题,不论在理论上还是在实践中均有重要意义,且实际运行的系统一般都要求是稳定的.因此,自从混杂系统提出以来,稳定性问题便受到了研究人员的广泛重视,近些年在混杂系统稳定性方面取得的理论成果也是颇为丰富的[4-5].目前,在混杂系统的稳定性研究中,主要有Lyapunov意义下的稳定性和Lagrange意义下的稳定性两类.本文主要研究Lyapunov意义下的稳定性问题,同时为了使分析系统的稳定性问题能够得到简化,文中把稳定性条件等价为求解线性矩阵不等式的问题,同时借助了已有的计算机工具来进行了辅助分析.
1 系统模型
本文讨论了一类自治切换混杂系统,其控制器被设计成一个闭环的混杂系统.其方程描述如下:

式中,x∈Rn,m∈M={m1,…,mN},这里x表示连续状态,m表示离散状态,混合状态空间H=Rn×M.该混杂系统模型的初始条件是(x0,m0)∈I0,I0表示所有可能初始条件的集合.切换集可以表示为如下形式:

每一个f(*,mi)表示一个子系统,当m的值改变的时候会导致向量场f发生改变.系统的变化过程可概括如下:由起始点处(x0,m0),当m0=mi,在时刻t0,演变轨迹可由x·=f(x,mi)得出.当x在t1时刻,其状态变为(x1,mj),变化曲线可由x·=f(x,mj)得出.为了使混杂系统稳定性条件体现在函数f和φ中,前提是对于任意初始条件都存在使系统趋于稳定的条件,且f(x,mi)∀mi∈ M 是连续的[6].
2 理论分析
2.1 稳定性理论
定义1 一个连续的函数α:R+→R+,满足以下条件:
(1)α(0)=0;
(2)α(z)>0,∀z>0;
(3)α(z1)≤ α(z2),z1< z2.则称函数α为K类函数.
定理1 (Lyapunov稳定性定理)若存在函数V:Rn×R→R以及K类函数α:R+→R+,β:R+→R+满足如下条件:
(1)α(‖x‖)≤ V(x,t)≤ β(‖x‖)
(2)∀t≥ t0,V(x,t)≤ h(V(x0,t0)),h∈C[R+,R+],h(0)=0,R+= [0,+ ∞)(函数 h 引用于文献[7])
则系统在平衡点0处是处于Lyapunov意义下的稳定状态.若‖x‖→∞ 时,α(‖x‖)→∞则系统在平衡点0处是全局稳定的.
假设混杂系统(1)、(2)中的混杂状态空间分为 l个不相交的区域 Ωq,q=1,…,l,Ωq既可以是有界的也可能是无界的,在每个区域Ωq中有函数Vq(x,t)作为系统的能量函数.为了在区域Ωq得到唯一的连续状态,这里假定:

当 (x,m)∈ Ωq时,V(x,t)=Vq(x,t),且假定初始状态是(x0,m0)∈ I0,能量是V(x0,t0).进而得出如下推论:
推论1 如果存在能量函数Vq(x,t),以及K类函数α:R+→R+,β:R+→R+满足如下条件:
(1)∀(x,m)∈ Ωq,α(‖x‖)≤Vq(x,t)≤β(‖x‖),q=1,…,l
(2)∀(x,m)∈ Ωq,∀t ≥ t0,Vq(x,t)≤h(V(x0,t0)),q=1,…,l
则系统在平衡点0处是处于Lyapunov意义下的稳定状态.
推论2 如果存在能量函数Vq:×R→R,q=1,…,l与时间无关,且每个能量函数Vq(x)对x(∀x ∈ Ωxq,q=1,…,l)可微,满足如下条件,(1)∀x∈,α(‖x‖)≤ Vq(x,t)≤β(‖x‖),q=1,…,l
(2)∀(x,m)∈ Ωq,(x)≤ 0,q=1,…,l
(3)∀x∈ Ωqr,Vr(x)≤ Vq(x),q=1,…,l,r=1,…,l
其中,α:R+→ R+,β:R+→ R+为 K 类函数,Ωqr表示系统从状态区域Ωq进入到Ωr,则系统在平衡点0处是处于Lyapunov意义下的稳定状态.
2.2 等价线性矩阵不等式分析
引理1 一个向量场f:Rn→Rn可以表示为如下形式:
根据上述引理可以把所有非线性子系统f(*,mi),mi∈M通过加权的线性子系统来表示,形式如下:
为了把系统稳定性条件转化成为求解线性矩阵不等式的问题,这里考虑把能量函数表示为如下形式:

从而可以得出以下推论:
推论3 如果存在矩阵 Pq,q=1,…,l,α >0,β>0,满足如下条件:
(3)∀x ∈ Ωqr,Pr≤ Pq,q,r=1,…,l
系统在平衡点0处是Lyapunov意义下的全局稳定状态.
3 仿真分析
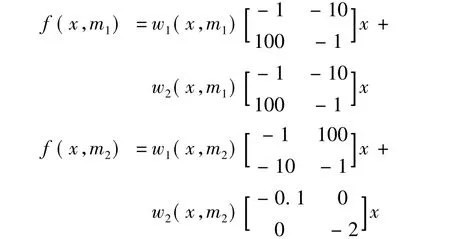
考虑如下两个包含离散状态的混杂系统:

其中切换集为S12={x∈R2|x2=0},S21={x∈ R2|x2=0.5x1},初始状态设为(x0,m0)=([- 5,5]T,m1),系统的状态变化曲线如图1所示,从图中可见该混杂系统趋于0点的稳定状态.
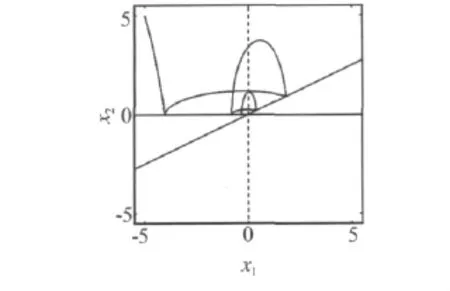
图1 混杂系统状态变化曲线
通过引理1可以把系统描述为如下形式:
根据推论3可以求得

能量函数的变化曲线如图2所示,从图中可以看出能量函数随时间推移呈递减趋势,即系统满足稳定性条件,从而证明了所提出理论是可行的.
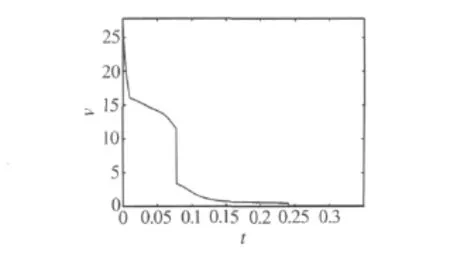
图2 能量函数变化仿真图形
4 结论
混杂系统中的稳定性问题是研究人员关注的重点内容之一,且已经在许多文献中进行了阐述和分析.本文通过对经典稳定性理论进行扩展,给出了含有非线性子系统的自治切换混杂系统的稳定性判据.随后,把稳定性问题等价转化为线性矩阵不等式的问题,进而利用便利的计算机工具对给出的实例进行了仿真分析,通过仿真结果验证了所提出理论的正确性及分析方法的有效性.
[1]莫以为,萧德云.混合动态系统及其应用综述[J].控制理论与应用,2002,19(1):1-8.
[2]MORSE A S,PANTELIDES C C.Introduction to the Special Issue on Hybrid Systems [J].Automatics,1999,35(3):347-348.
[3]BRANICKY M S.Multiple Lyapunov Functions and other analysis tools for switched and hybrid systems[J].IEEE Trans.Automat.Contr,1998,43(4):475-482.
[4]DECARLO R A,BRANICKY M S,PATTERSON S,et al.Perspectives and results on the stability and stabilizability of hybrid systems[J].Proceedings of the IEEE,2000,88(7):1069-1082.
[5]DAVRAZOS G N,KOUSSOULAS N T.A Review of Stability Results for Switched and Hybrid Systems[C].Dubrovnik,9th Mediterranean Conference on Control and Automation,2001:235-244.
[6]SLOTINE J E,LI W.Applied Nonlinear Control[J].Prentice-Hall,2003,18(2):25-38.
[7]YE H,MICHEL A N,HOU L.Stability theory for hybrid dynamical systems[C].Croatia,In Proc.of 34th CDC,1999:2679-2684.
