基于驾驶特征的临界安全车距数学模型
2012-07-02王兴伟谭德荣孙静霞
王兴伟,谭德荣,孙静霞
(山东理工大学 交通与车辆工程学院,山东 淄博 255049)*
0 引言
交通事故不断增加,给人们带来了巨大的安全隐患和经济损失,防撞系统作为智能交通的重要组成部分,能有效降低交通事故的发生,已成为国内外研究的重点.临界安全车距数学模型作为防撞系统功能实现的前提,其准确性与实时性对降低防撞系统的虚惊率起到至关重要的作用[1-4].基于驾驶特征的临界安全车距数学模型相比于传统数学模型具有更好的准确性与实时性,并具有一定的自适应学习功能,实现驾驶特征的在线修正能力,对防撞系统的研究开发具有重要意义.
1 驾驶特征辨识模型的建立
通过对驾驶员制动次数与节气门位置变化曲线的实时采集,检测出驾驶员的驾驶行为,确定每一时间段内的驾驶特征,再将驾驶特征因素融合到交通系统中,从而获得实时准确适合不同驾驶特征的临界安全车距数学模型.
驾驶员的制动次数可以通过对制动信号实时采集实现.图1为制动次数采集电路,采集芯片选用的C8051F005单片机为低电平有效,工作电压为3.3 V,但其I/O引脚、RST、JTAG端口允许5 V的输入电压.当驾驶员制动时,制动开关S1闭合,电路短路,LED1熄灭,引脚P0.1变为低电平,动作次数m自动加1,高速公路10 s或城市交通5 s后制动次数自动清零,重新记录.
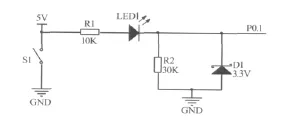
图1 制动信号采集电路
节气门位置传感器信号能够在一定程度上反映驾驶员操控车辆的意图,当车辆正常行驶时,节气门开度大小只取决于加速踏板输入量的大小.节气门位置传感器反映节气门的开度大小转换为电信号输入ECU,节气门开度最大时电压约为4.5 V,最小开度时电压约为0.5 V.
图2为节气门位置传感器的电压采集电路与线性输出特性.怠速触点IDL空接,VC连接5 V电压,E2接地,线性电压VTA通过两个20 kΩ电阻的分压限流后连接到单片机的AIN0引脚,将模拟电压转化为数字电压,由于单片机内部12位ADC的参考基准电压最大为2.4 V,故并联一个2.4 V的稳压管来限制电压确保准确采集,把测得的数字电压实时的跟检测点电压UA/2和UB/2进行比较,UA、UB分别设为2V和3 V.通过实时检测超过UA/2、UB/2的次数a、b,确定出驾驶员的驾驶行为,进而推断出每一时间段内驾驶员的驾驶特征.
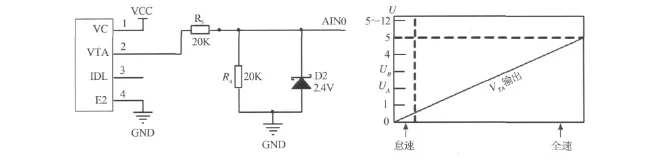
图2 节气门位置传感器的电压采集电路与线性输出特性
驾驶员的驾驶特征由其制动次数和节气门位置变化共同决定.在高速公路上驾驶环境简单,驾驶员的制动次数少,节气门位置变化大、频率慢.在10 s内,当m+b=0时,说明驾驶员在一段时间内没有或很少有动作,驾驶员处于注意力不集或昏睡中状态中,驾驶特征为迟缓型;当1≤m+b≤4时,驾驶员正常驾驶,驾驶特征为稳定型;当m+b≥5时,说明驾驶员动作频繁、心理急躁,容易判断失误,驾驶特征为急操型.在城市中行驶时驾驶环境复杂,驾驶员的制动次数多,节气门位置变化小、频率快.驾驶员很少出现昏睡或注意力不集中情况,在5 s内,当0≤m+a≤4时,驾驶特征为稳定型,当m+a≥5时,驾驶特征为急操型.新手在驾车时,将其归为急操型.
2 建立驾驶特征的数学模型
根据交通工程学、运动学、动力学等学科理论与方法,综合分析驾驶员反应过程以及整个汽车制动过程,建立传统动力学临界安全车距数学模型,在其基础上充分考虑人-车-路-环境因素的影响,将驾驶特征、车况、路况、环境因子等因素融合到交通系统中,从而获得实时准确适合不同驾驶特征的临界安全车距数学模型.
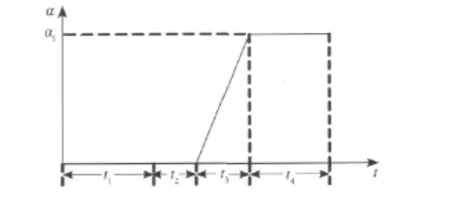
图3 车辆制动过程

图4 两车安全距离模型
当自车遇到危险时,驾驶员所历的时间段由驾驶员反应时间t1、制动协调时间t2、减速增长时间t3、持续制动时间t4组成,设本车的初始速度为v1(km/h)、前车的速度为v2(km/h)、两车的相对速度为v、车辆的最大减速度为a、车辆绝对安全距离为d.传统动力学数学模型在很多论文中都做了详细的推导,推导过程可以参考文献[1-4].车辆制动过程如图3所示,两车安全距离模型如图4所示.
2.1 传统动力学临界安全车距数学模型
当前车静止时
临界报警安全车距为:

临界危险安全车距为:

当前车减速时
临界报警安全车距为:

临界危险安全车距为:

从前述公式中可以看出驾驶员的反应时间是影响数学模型的重要组成部分,不同驾驶行为特征与驾驶员反应时间有密切关系.在此基础上考虑不同车况、路况、环境因素对数学模型的影响,建立更加实时准确适合不同驾驶特征的临界安全车距数学模型.设不同驾驶特征对应的反应时间为φm、驾驶员连续驾驶对反应时间的延时为φn、不同传输方式对应的制动协调时间为γi、不同路况对应的最大值制动加速度为aj.不同驾驶行为对应的车辆绝对安全距离为dm.
2.2 驾驶特征临界安全车距数学模型
当前车静止时
临界报警安全距离为:
临界危险安全距离为:

当前车减速时
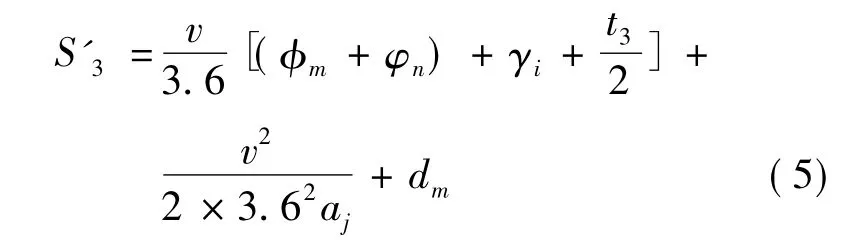
临界报警安全距离为:
临界危险安全距离为:

3 参数分析与取值
3.1 驾驶员的影响因素分析与取值
驾驶员作为交通的参与者与决策者,在交通安全中起到核心作用,也是影响临界安全车距数学模型的主要因素[5].驾驶员会受到自身因素和外部因素的影响,使驾驶员在驾驶特征上发生变化,影响驾驶员的反应时间,导致数学模型的出现偏差.随着驾驶时间的增加,驾驶员的反应时间会变缓慢,影响数学模型的准确性.
驾驶员的反应时间由于年龄、性别、情绪、身体状况等因素很难准确确定.驾驶员的反应时间一般为 0.4 ~1.2 s[6],分别取其平均值0.8 s作为驾驶特征为稳重型对应的反应时间φ1.德国奔驰汽车公司对各类交通事故研究得出结论:如果司机能够及时认识到危险提早0.5 s采取措施的话,至少可以避免60%的追尾事故;如果能提早1 s采取措施的话,可以避免90%的交通事故发[7].故取1.3 s、1.8 s分别作为驾驶特征为急操型和迟缓型对应的反应时间φ2、φ3.因此测试系统可以对驾驶员的驾驶行为进行实时采集,判断出驾驶员的驾驶特性,确定驾驶员的反应时间,从而实时修正数学模型,使其更加适合每位驾驶员,数学模型更具有实时性、准确性.
国家规定对驾驶员连续驾车超过4 h的,要责令停车休息20 min以上[8],驾驶员一天的驾驶时间不能超过8 h.随着驾驶员连续驾驶时间的积累,驾驶员会产生疲劳,驾驶疲劳会对驾驶员的反应时间带来一定延迟,给临界安全车距带来较大误差.驾驶疲劳引发的交通事故占交通事故总量的比例较高,有些学者认为交通死亡事故的35% ~45%可归因于驾驶疲劳[9].数学模型根据驾驶员连续驾驶时间的长度,对驾驶员的反应时间作相应的延时,将驾驶员连续驾驶时间的分为三个时间段0~2 h、2 ~3 h、3 ~4 h,分别取 0.2、0.4、0.6 s作为驾驶员连续驾驶时间对反应时间的延时.
现实中两车绝对安全距离一般为2~5 m,虽然驾驶员的驾驶特性会对车辆绝对安全距离dm产生一定影响,但影响不是很大,故数学模型绝对安全距离取值均为3 m.
3.2 车、路、环境的影响因素分析与取值
由于车辆的多样性与复杂性,每辆汽车的车况各不相同,建立适合每辆汽车的数学模型是不切实际的.在众多车况中影响数学模型最主要因素为汽车的制动方式,制动方式能对数学模型中的制动协调时间γi和汽车减速增长时间t3产生一定影响.制动协调时间γi包括消除制动拉杆、制动鼓间隙等,不同类型车辆按照制动能量传输方式的不同主要分为液压式、气压式两类,分别对应汽车的制动协调时间 γi为 0.2 ~0.4 s、0.4 ~0.8 s,并取区间的最大值 0.3、0.6 s作为液压式、气压式汽车的制动协调时间,而车辆的减速增长时间 t3一般选取为 0.2 s[6].
汽车制动减速度随轮胎类型、车辆的装载情况和路面附着条件的不同而不同.为了简化模型的复杂性降低计算量,系统设同一路面上前后行驶的两车的减速度均按最大制动减速度选取,且前车与后车的减速度取值相同均为a,a=φ g,φ为路面附着系数.路况的影响因素主要考虑路面为干燥、潮湿、冰雪时的情况,数学模型对此时制动减速的取值为 0.7、0.6、0.1 g[10].
环境主要对避撞系统起到辅助决策与预警的功能,环境分为晴朗、雨天、雪天或雾天三种不同的类型,分别限定驾驶员最高驾驶速度为120、80、60 km/h,其主要体现在系统的软件程序中.
4 计算分析比较
为使计算简便、对比结果明确,本文选定前车为静止或前方为障碍物,即v2=0时的情况.假设驾驶员连续驾车时间为2.5 h,车辆为液压制动方式,路面干燥的情况下,自车的车速分别在50、60、70 km/h时,驾驶员的不同驾驶特征φm对应的报警安全车距S'3,跟传统动力学数学模型计算所得的行车安全车距S'1之间的比较如附表所示.
通过比较发现,本数学模型,能够根据驾驶员不同的驾驶特征测出相对应的临界安全距离S'3,而传统数学模型只能测出驾驶员总体的临界安全距离S'1.以自车车速为60 km/h为例,设两车间距为55 m,对于传统数学模型而言,驾驶员的行车是安全的;对于驾驶特征为急操型和迟缓型的驾驶员,行车存在碰撞的危险,应提醒报警.此数学模型相比于传统动力学数学模型具有更广的使用范围,更高的准确性和实时性,减低了使用车速,减小了道路通行能力.

附表 安全车距的比较
5 结论
本文通过信号采集电路对驾驶行为的实时采集与分析,建立了驾驶特征辨识模型,并将不同的驾驶特征和车况、路况、环境因子等因素融合到传统数学模型中,建立的基于驾驶特征的临界安全车距数学模型具有准确性、实时性、适合各种驾驶员,并具有在线修正能力,该数学模型作为避撞系统的前提,能有效的降低避撞系统的虚惊率,对避撞系统的发展具有重要意义.
[1]韩洋.高速公路汽车追尾防撞预警系统研究[D].太原:中北大学,2008.
[2]陈光武,侯德藻.高速公路实用安全车距计算模型[J].人类工效学,2001,7(1):41-43.
[3]刘刚,侯德藻,李克强,等.汽车主动避撞系统安全报警算法[J].清华大学学报,2004(5):697-700.
[4]孔金生,郭非.基于安全距离模型的汽车防追尾避撞方法[J].微计算机信息,2008,32:251-252.
[5]李江.交通工程学[M].北京:人民交通出版社,2007:3-18.
[6]朱琦.汽车预警与巡航系统的研究[D].合肥:合肥工业大学,2009.
[7]郑锐.毫米波汽车防撞雷达的设计与实现[D].南京:江苏大学,2010.
[8]道路运输从业人员管理规定[EB/OL].http://www.gov.cn/ziliao/flfg/2006-12/22/content_476254.htm.
[9]源泉,李一兵.疲劳驾驶汽车追尾事故的致命杀手[J].汽车与安全,2005(8):44-47.
[10]孔春玉,杨济匡,聂进.基于真实事故形态分析的行人探测模型研究[J].汽车工程,2010,32:977-983.
