高压变频矢量控制系统的仿真
2012-07-02王英朱丽媛
王英,朱丽媛
(大连交通大学 电气信息学院,辽宁 大连 116028)*
0 引言
随着电气传动技术,尤其是变频调速技术的发展,高压变频技术得到了广泛应用.高压变频器有多种拓扑结构,其中单元串联型拓扑结构是应用最普遍且最有发展前景的一种拓扑结构.单元串联型高压变频技术的应用使得变频器有完美无谐波的电压输出;其高质量的波形输出使电机不需要降额使用;其多重化技术可使电网功率因数保持在0.95以上,不需要任何的功率补偿装置,这远远优于其它类型的变频调速系统[1].
单元串联型高压变频系统采用矢量控制策略进行控制,可以提供更好的调速性能,本文根据载波移相SPWM控制和矢量控制的基本原理,对基于矢量控制的单元串联型高压变频系统进行了分析研究,利用MATLAB建立了高压变频矢量控制系统仿真模型,并对此进行了仿真分析.仿真结果表明,基于矢量控制的单元串联型高压变频系统具有良好的动态特性,可以满足工业领域对高品质的交流调速系统的要求.
1 单元串联型高压变频矢量控制系统
1.1 系统结构
高压变频矢量控制系统主要由移相变压器、功率单元和矢量控制器组成,图1为6单元串联高压变频矢量控制系统的简单结构图.其中输入侧采用多重化技术,可有效消除对电网的谐波污染;输出侧功率单元采用载波移相SPWM技术,能够提高输出电压的等效开关频率.功率单元串联这种拓扑结构的一个显著特点是,当其中一个功率单元出现故障时,可自动退出系统,而其余的功率单元可继续保持电机的运行,减少停机时造成的损失[2].
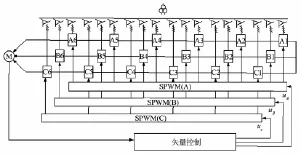
图1 高压变频矢量控制系统的简单结构图
1.2 系统的矢量控制
本系统采用的是基于转差频率的矢量控制策略..转差频率矢量控制不需要进行复杂的磁通检测和繁琐的坐标变换,只要在保证转子磁链大小不变的前提下,通过检测定子电流和转子角速度,经过数学模型的运算就能实现间接的磁场定向控制,其控制的基本方程式如下[3]:
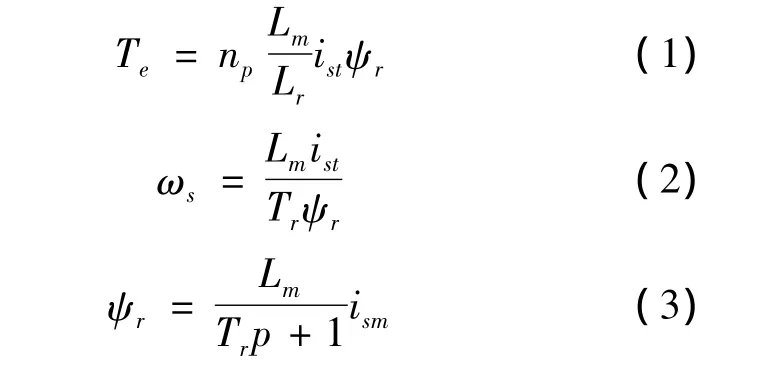
式中,ism为定子电流的励磁分量;ist为定子电流的转矩分量;Tr为转子时间常数;p为微分算子.若保持磁通不变,则Trp=0,由上述矢量控制方程(1)~(3)计算可以得到:

图2为基于转差频率控制的异步电机矢量控制调速系统原理框图,异步电机转速ω与给定转速ω*比较,通过转速调节器得到定子转矩电流.由于单元串联型高压变频系统采用电压型变频器,故需要相应的将电流控制转换为电压控制,其变换关系为:


图2 转差频率控制的矢量控制系统原理框图
2 单元串联型高压变频矢量控制系统的建模与仿真
2.1 矢量控制系统建模
根据前述单元串联型高压变频器的矢量控制原理,建立基于Simulink的高压变频矢量控制系统仿真模型,如图3所示.
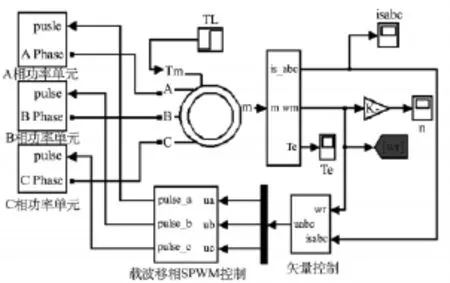
图3 高压变频矢量控制系统仿真模型
功率单元模块采用单元串联型的结构,独立直流电源供电,相子模块内部结构如图4所示.每个功率单元的SPWM信号由载波移相SPWM方法生成.
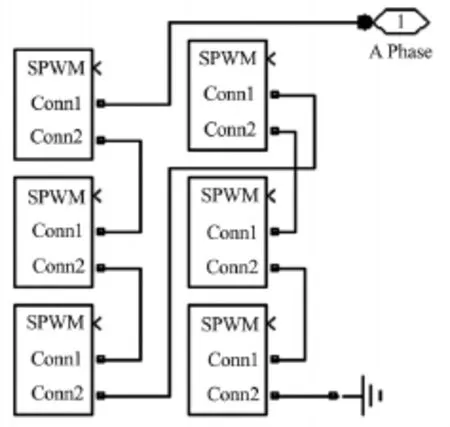
图4 相子模块内部示意图
矢量控制模块采用转差频率矢量控制,由给定、PI调节器、函数运算和坐标变换组成,利用异步电动机的矢量控制方程式:式(1)~(3)搭建出Simulink仿真模型如图5所示.其中ASR采用的是带输出限幅的PI调节器如图6所示.

图5 矢量控制子模块
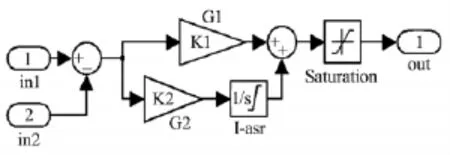
图6 PI调节器
载波移相SPWM控制模块的功能是是将矢量控制中经2r/3s变换所得到的三相正弦电压参考信号作为调制波,分别与N对相位差为π/N的三角载波相比较,从而得到SPWM脉冲信号,得到的N路SPWM脉冲分别控制单相N个功率单元,把得到的输出电压进行串联叠加,从而产生2N+1个电平的输出相电压.图7为单个功率单元SPWM脉冲发生模型.

图7 两三角波与调制波比较SPWM脉冲发生模型
2.2 仿真分析
利用MATLAB对如图3所示的单元串联型变频系统进行仿真.变频器采用6单元串联型结构,结构如图1所示.电机采用380 V普通电机,功率单元直流电源采用36 V.电机参数设为:线电压 U=380 V,频率 f=50 Hz,极对数 np=2,定子电阻 RS=0.435 Ω,定子电感 Ls=0.002 H,转子电阻 Rr=0.816 Ω,转子电感 Lr=0.002 H,转动惯量 J=0.19 kg·m2,定转子互感 Lm=0.069 H.仿真给定转速为1 400 r/min时的空载起动过程,在启动0.5 s后加TL=60 N·m的负载转矩.设置仿真时间为0.8 s.图8为变频器调制波波形及输出电压波形,其中图8(a)为变频器A相载波移相SPWM调制波,图8(b)为变频器A相输出电压,图8(c)为0.64~0.68 s变频器A相输出电压放大图.图9为电机的输出特性,其中图9(a)为异步电机定子A相电流波形,图9(b)为电机转速波形,图9(c)电机转矩波形.
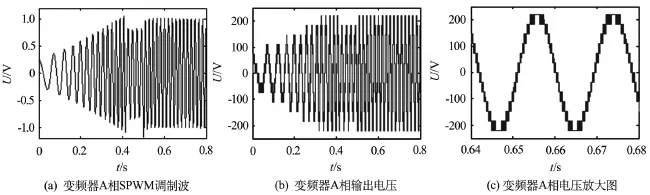
图8 变频器调制波及输出电压波形

图9 电机输出特性波形
根据仿真结果可以看出,三相异步电动机在矢量控制、载波移相SPWM以及六个功率单元串联驱动的条件下,电机绕组相电压波形如图8(c)所示为13电平,符合电平数与级联单元数之间表达式的2N+1关系,其波形更加接近正弦波;随时间变化,转速逐渐上升,在0.42 s时,转速稍微有超调后稳定在1 400 r/min;启动电流为50 A左右,之后电流下降为空载电流.在异步电机加载后电流迅速上升,电动机的转矩也随之增加,转速在略微调整后恢复不变.
由仿真结果可以得到,异步电机在单元串联型变频矢量控制系统驱动下,不但其电压、电流波形谐波含量少,而且其调速特性有很大的提高.
3 结论
单元串联型高压变频器是目前应用最为成熟的一种拓扑结构,是在高压变频调速领域占绝对优势的一种技术;而单元串联型高压变频矢量控制系统,能够很好的提高电网质量,减少输出谐波并有效防止电机的转矩脉动.因此,本文对基于矢量控制的单元串联型高压变频系统进行了研究分析,并对其进行了建模仿真,仿真结果表明此高压变频矢量控制系统具有良好的控制性能,能够满足工业生产对高压电机调速控制的要求.
[1]郭建平,欧阳红林.高压变频器的级联移相控制[J].防爆电机,2008,43(5):17-19.
[2]赵文承.单元串联多电平高压变频器技术分析[J].山东冶金,2004(6):23-25.
[3]洪乃刚.电力电子、电机控制系统的建模和仿真[M].北京:机械工业出版社,2011.
[4]吴国祥,江友华.级联型多电平高压变频器研究[J].电机与控制应用,2007,34(1):34-38.
[5]南永辉,罗仁俊,伍海林,等.基于级联型多电平高压变频器的异步电机控制策略[J].变流技术与电力牵引,2008(5):11-15.
[6]张皓,续明进,杨梅.高压大功率交流变频调速技术[M].北京:机械工业出版社,2007.
