SVPWM控制2台双Y移30°PMSM串联系统的研究
2012-06-26刘陵顺张海洋苗正戈
刘陵顺,张海洋,苗正戈
(海军航空工程学院 控制工程系,山东 烟台 264001)
多电机驱动系统作为运动控制研究领域的重要内容之一,广泛应用于地铁、机车牵引、挤压机组、机器人等应用场合。而要推出性能优良的机车牵引、机器人等工业驱动以及综合电力舰船系统就需要解决同一直流母线电源和同一逆变器供电的多台电机独立运行问题[1]。
PWM方法种类繁多,其中SVPWM由于其具有电压利用率高、物理概念清晰、易于数字化实现等优点,被广泛应用在交流调速系统中[2-3],SVPWM应用于多相电机串联驱动系统中的研究会更复杂,实现方法与应用于普通调速系统相比有很多不同。因此,本文以2台双Y移30°永磁同步电机组成的串联驱动系统为例,为了实现2台电机的独立运行,阐述了SVPWM的控制原理,给出了基本电压矢量具体的选取与计算方法。与id=0的矢量控制策略结合,进行了变速变载运行的仿真分析,证实了所提SVPWM控制策略的可行性。
1 2台双Y移30°永磁同步电机串联模型
根据多相电路坐标变化的一般理论,多相电机基于自然坐标下的数学模型经过解耦矩阵运算后,电机转矩完全由定子和转子的d-q电流分量决定,而与它们的x-y电流分量和零序分量无关。因此,任意n相电机的磁通和转矩控制只需要2个电流分量。所以,对于六相电机而言,可以用x-y电流分量来控制另一台电机,为此需将另一台电机的定子绕组与第1台电机定子绕组通过适当的相序转换串联在一起[4]。然而,要对2台串联电机进行独立解耦控制,所用控制方法需要保证:一台电机的磁通/转矩生成电流不会在另一台电机中生成磁通/转矩。即一台电机的d-q轴电流分量应为另一台的x-y分量,反之亦然。从而实现用1台逆变器驱动2台电机的独立解耦运行。
由逆变器输出的六相电流经过空间变换矩阵变换后,投影到3个正交的子空间中(d-q平面、x-y 平面和o1-o2平面),在d-q平面和x-y 平面的电流分量可以产生独立控制的磁动势。其中d-q平面的电流分量用来控制第1台电机,x-y平面的电流分量控制第2台电机,2台双Y移30°电机串联系统与逆变器连接如图1所示[4]。

图1 2台双Y移30°PMSM串联连接图Fig.1 Two double Y shift 30°PMSM series connection
基于id=0的矢量控制策略和SVPWM控制技术的2台双Y移30°PMSM串联系统控制系统如图2所示。
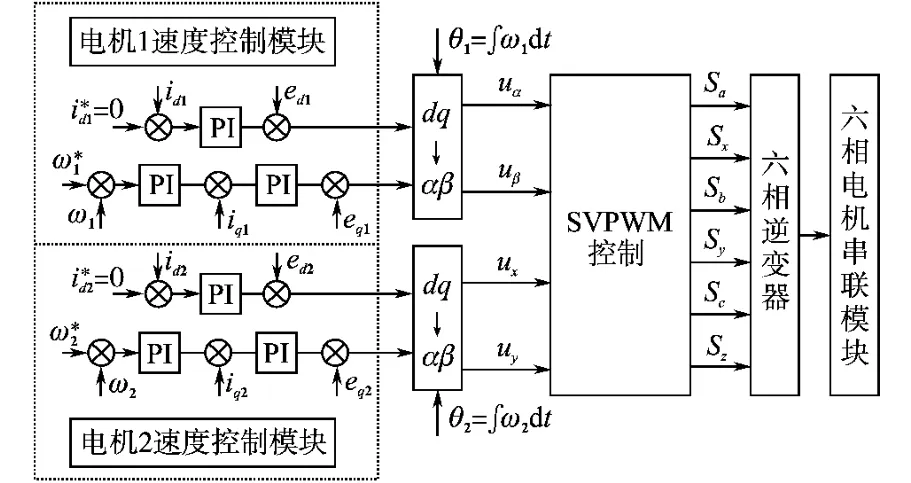
图2 2台双Y移30°PMSM串联控制系统Fig.2 The controlling of two double Y shift 30°PMSM series system
2 SVPWM控制原理
2.1 矢量分布
六相全桥逆变器共有26=64个空间电压矢量,其中62个非零电压矢量,2个零电压矢量。另外62个非零电压矢量中有2个矢量21(010101)和42(101010)为无效矢量,即abc或xyz绕组所在桥臂的上桥臂同时导通或者下桥臂同时导通。60个有效非零矢量在d-q平面和x-y平面的投影分布如图3所示。其中每个十进制代表开关模式,可以转换为6位二进制数,“1”代表逆变器桥臂的上开关导通,“0”代表下开关导通。
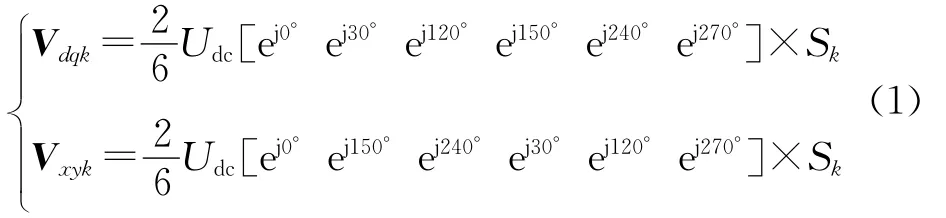
式中:Vdqk为d-q子空间中的空间电压矢量;Vxyk为x-y子空间中的空间电压矢量;=[KaKxKbKyKcKz],Ka,L,Kz等为“1”时代表逆变器的上开关导通,“0”代表下开关导通。
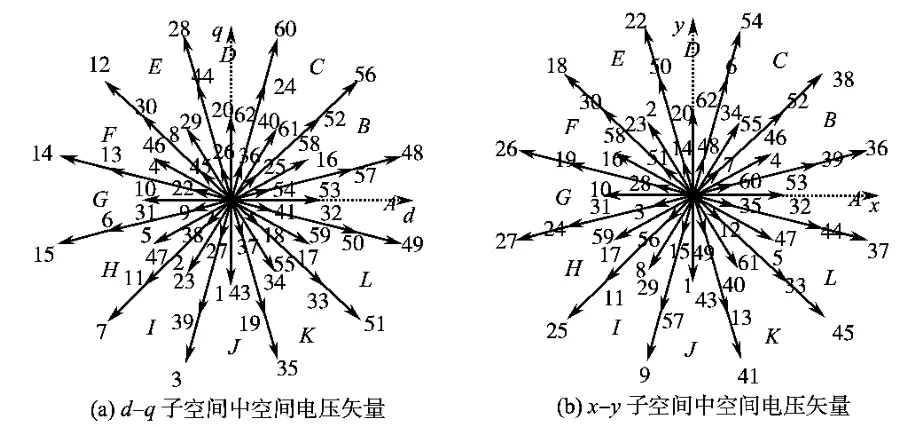
图3 六相逆变器空间电压矢量分布Fig.3 The distribution of six-phase inverter space voltage vector
2.2 基本电压矢量的选取与计算
根据一个采样周期的平均矢量概念,d-q平面和x-y平面的参考电压矢量可以通过调整4个有效非零矢量和2个零矢量的应用时间来实现。有效非零矢量可根据长度分为4组,如图4所示。以工作在d-q平面的电机1为例,选取d-q平面上的2个相邻的最大矢量和在同一个方向上2个次大的电压矢量为基本电压矢量,这2组电压矢量在x-y平面所张成的十二边形又是最小和次大的,那么参考电压矢量是由满足这2个条件并在d-q平面彼此相邻的2个大电压矢量和2个次大电压矢量合成的。如参考电压位于图4a的扇区B时,则选择48,56,57,52为基本电压矢量。这4个矢量在x-y平面的投影如图4b所示。
图4 参考电压矢量在d-q平面扇区B的实现Fig.4 The distribution of reference voltage vector in the sector Bof d-q plane
为了确保两电机的解耦控制,即在控制电机1时不影响电机2的运行,要求在一个周期内电机1的基本电压矢量在x-y平面的投影和为零,即Ts和Ts为零[5]。在一个采样周期内,需要选择5个电压矢量(其中一个零矢量)才能保证在每一个采样周期中有唯一解。作用在d-q平面上的每个电压矢量的时间可以通过下式计算得出:

式中:Tk(k=1,2,3,4,5)为作用在第k个电压矢量上的时间;为第k个电压矢量分别在d轴和q轴的投影;为第k个电压矢量分别在x轴和y轴的投影分别为参考电压矢量在d轴和q轴投影。
六相逆变器输出相电压矢量瞬时值可以利用逆变器联结矩阵关系[Mc]计算所得:

逆变器输出电压矢量可以通过转换矩阵转换成d-q 平面、x-y 平面和o1-o2平面的矢量:

其中

同理,工作在x-y平面上的电机2的电压矢量作用时间可通过下式计算得出:

并且,如果T1+T2+T3+T4>Ts,做出以下调制:
以d-q平面扇区B为例,其矢量作用顺序和相应的开关状态如图5所示,其中为高电平时(Sk=1)表示第k相上桥臂开关导通,下桥臂开关关断。
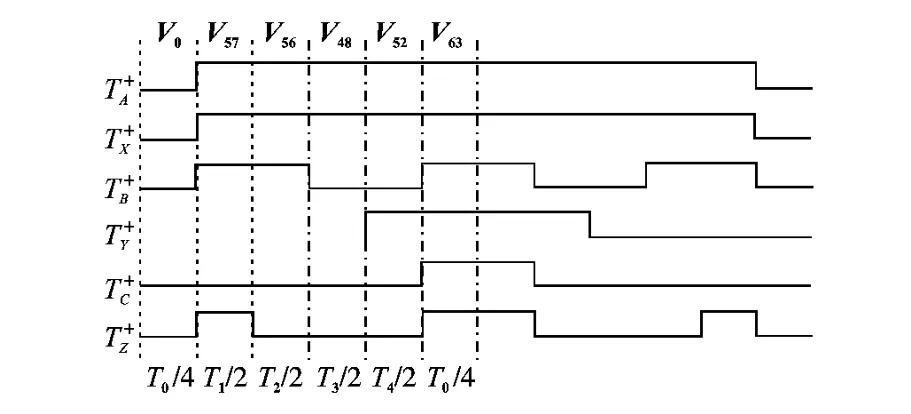
图5 SVPWM控制的矢量作用顺序及开关状态Fig.5 The order and the state of the SVPWM control vector switch
2.3 工作平面的选取
参考电压矢量的选取必须能够提高直流母线电压的利用率,这里通过一个周期内判断d-q参考矢量和参考矢量的大小来决定开关矢量的选择,即如果d-q平面的参考矢量大于x-y平面的参考矢量,则开关矢量由d-q平面的2个大矢量和2个次大矢量决定,反之,如果x-y平面的参考矢量大于d-q平面的参考矢量,则开关矢量由xy平面的2个大矢量和2个次大矢量决定。参考电压矢量的选择流程如图6所示。

图6 参考电压矢量选择流程图Fig.6 The flow chart of reference voltage vector′s selection
3 串联驱动系统的仿真分析
在Matlab/Simulink环境中建立串联系统的模型。系统包括电机串联模块、速度调节模块、坐标变换模块、逆变器模块等。对系统仿真参数设定如下:直流电压Udc=300V;电机参数:R=rs1+rs2=2.875Ω,L1=8.5mH,L2=12mH,Ψf1=0.175Wb,Ψf2=0.2Wb,p1=p2=4;运动参数:J1=0.089kg·m2,J2=0.1kg·m2,F1=0.005,F2=0.01。
首先对串联驱动系统的变速运行情况进行仿真分析。电机1运行在200r/min,电机2运行在300r/min,0.5s时刻电机1加速到400r/min的仿真波形如图7所示。
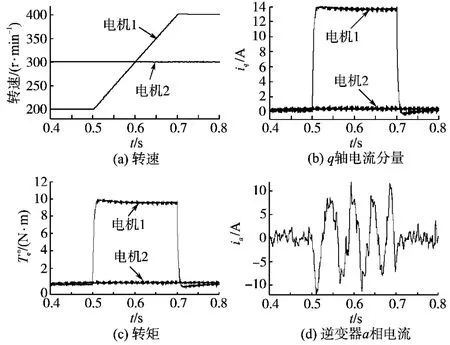
图7 电机1加速Fig.7 Motor 1speed up
从仿真波形可以看出:当电机1突然加速时,电机1的q轴电流分量增加,电磁转矩也随着增加,达到给定转速后,q轴电流分量降至零,转矩也降为零;在电机1变速过程中电机2的转速、q轴电流分量和转矩大小均未变化;逆变器a相电流在电机1加速过程中幅值变大,由于逆变器的a相电流结合了2台电机不同步的电流,因此波形不再是规则正弦波。
然后对串联驱动系统的变负载情况进行仿真分析。零负载的电机1,电机2运行在300r/min,对电机2在t=0.5s时突加负载的仿真波形如图8所示。
从仿真波形可以看出,电机2负载突然增加时该电机的转速稍微减小,电机2的q轴电流分量突增至某数值,电磁转矩与负载转矩平衡,随后电机2转速恢复至给定转速;电机2突加负载的整个过程中电机1的转速和力矩均不受影响,运行稳定;逆变器a相电流在电机2加负载时幅值变大,在电机2加负载过程中转化为电机2的q轴电流分量。

图8 电机2突加负载Fig.8 Motor 2add load
4 结论
本文介绍了2台双Y移30°PMSM的串联系统的工作原理,阐述了SVPWM控制该串联系统的具体方法。在Simulink环境下建立了该串联系统的仿真模型,仿真结果表明,SVPWM控制串联系统的2台电机在同一逆变器的驱动下,可以实现解耦控制,即2台电机可以独立运行。以此为基础,可以对多相电机串联系统进行更深入的研究。
[1]Ward E E,Harer H.Preliminary Investigation of an Invertor-fed 5-phase Induction Motor[J].Proc.Inst.Elect.Eng.,1969,116(6):980-984.
[2]Emil Levi.Operating Principles of a Novel Multiphase Multimotor Vector-controlled Drive[J].IEEE Trans.on Energy Convertion,2004,19(3):508-517
[3]Zhao Y,Lipo T A.Space Vector PWM Control of Dual Three-phase Induction Machine Using Vector[J].IEEE Trans.,1995,31(5):1100-1109.
[4]Levi M Jones,Vukosavic S N,et al.A Novel Concept of a Multiphase,Multi-motor Vector Controlled Drive System Supplied From a Single Voltage Source Inverter[J].IEEE Trans.Power Electr.,2004,19:320-335.
[5]Iqbal A,Levi E.Space Vector PWM for a Five-phase VSI Supplying Two Five-phase Series-connected Machines[C]∥In Proc.Int.Conf.EPE-PESC,Portoroz,Slovenia,2006:222-227.
