超短基线纯方位定位的目标搜索航迹规划
2012-06-23勇俊李昭郑翠娥孙大军
勇俊,李昭,郑翠娥,孙大军
(哈尔滨工程大学水声技术国防重点实验室,黑龙江哈尔滨150001)
水声定位系统在海洋资源的勘探开采作业中发挥着对探测载体或开采设备进行导航定位的作用[1-3].作业结束后需要对水下声信标发送释放指令使其上浮回收[4].若声信标未响应释放指令,则要对其打捞以减小财产损失.当信标丢失时间过长,其内部的同步信号可能失稳,此时定位系统无法获得较为准确的目标斜距信息,导致常规定位方法定位结果的偏差很大甚至无法定位.基于超短基线的纯方位定位方法可以解决这个问题.该方法利用纯方位交汇原理,通过超短基线测量目标的方位角完成对目标位置的解算[5].与其他交汇定位方法类似,定位误差与交汇测量的航迹直接相关,需要对测量船只的轨迹进行规划以减小定位误差,提高定位精度,为声信标的打捞操作提供尽可能准确的位置信息.同时,在较大范围内对丢失目标进行搜索时,行船轨迹还需要考虑搜索效率、操船便捷程度等因素.
本文结合利用超短基线纯方位定位搜索丢失信标的实际需求,以定位算法误差分布为依据,对测量船搜索丢失信标的航迹进行了规划,并利用计算机仿真与外场实验验证了所设计航迹对超短基线纯方位定位效果的提高.
1 超短基线纯方位定位原理
在丢失声信标同步失稳后,超短基线无法获得准确的斜距信息,但仍可利用得到目标的方位信息,并通过纯方位交汇的方法确定目标位置[6].
利用超短基线测量目标与基阵坐标系下的夹角αJ、βJ,通过“基阵-船”,“船-大地”的两次坐标转换即得到目标与大地坐标水平面两轴夹角αD、βD,进而得到目标的水平方位角为

式中:ΔY=Yi-Y0,ΔX=Xi-X0,均为船只与信标的大地坐标之差.若对目标进行连续N次观测,则可构建方程组:

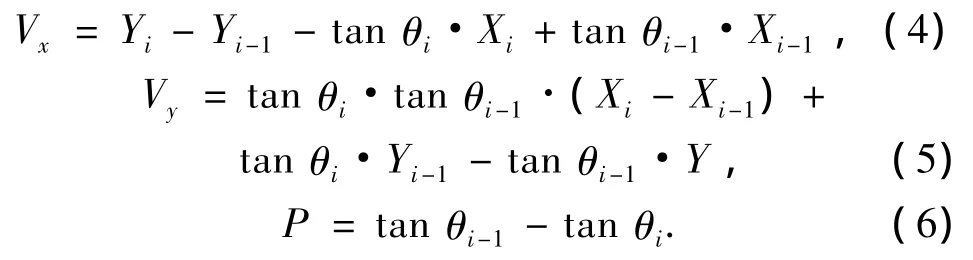
利用相邻两次的观测数据解得目标的坐标位置为

式中:
对于目标的深度值,可利用求得的目标水平坐标与俯仰角进行估计.
由此仅根据超短基线获得的目标方位信息实现了对目标位置的确定.
2 纯方位定位误差空间分布
分析纯方位定位的原理可知:此方法实际上利用船只行进中相邻测点构成测量的基线,利用方位交汇实现定位.因而测量的基线即船只测量航迹会对定位性能产生直接影响,有必要对其进行合理规划[6-8].实际中为确保对搜索目标定位的实时性,一般采用临近的2个测点进行交汇,故将船行轨迹分解为由相邻两测点组成的直线段[9-10].因此分析相邻两测点的定位误差特性对航迹设计具有指导意义.
构建基于两测点定位模型如图1所示.以两测点连线方向作为X轴,其中垂线作为Y轴,设对应两点的坐标为(D,0,0),(-D,0,0),则两测量点的测量基线长度为2D.被测目标的坐标为(X,Y,Z),利用USBL(ultra short baseline)测得目标与两侧点夹角分别为 θ1、θ2.
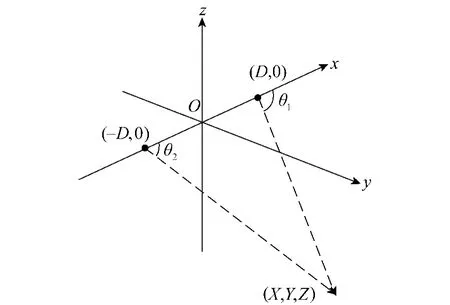
图1 两测点定位模型Fig.1 Two mearsure-points positioning model
为简化计算,假设目标与2个测点均位于同一水平面,根据式(3),目标的X、Y坐标写为

由于本定位方法主要利用方位交汇实现定位,故主要分析由测向误差导致的定位误差的性质.
将式(7)和(8)分别对 θ1、θ2求偏导数得

假设两次方位角测量中的误差相同,即dθ1=dθ2=dθ,并将 tan θ1、tan θ2分别用目标坐标与基线长度表示后代入式(9)和(10)整理得

式(11)~(12)即为双测点直线航迹条件下,对目标X轴、Y轴方向下的定位误差表达式.
首先研究X轴方向的定位误差随Y值的变化情况,即可得到目标沿平行于Y轴方向运动时的定位精度空间分布,利用空间对称性仅讨论Y>0情况即可.
1)若Y2+D2>X2:
当X∈(-D,D)时,Y方向变化如表1所示.

表1 Y方向变化Tabel 1 Change in Y direction
2)若 Y2+D2<X2,在时,恒有<0,|dX|为关于 Y的单调递增函数,存在极小值 2
进而研究X轴方向的定位误差随X值的变化情况,即可得到目标沿平行于X轴方向运动时的定位精度空间分布,如表2所示.
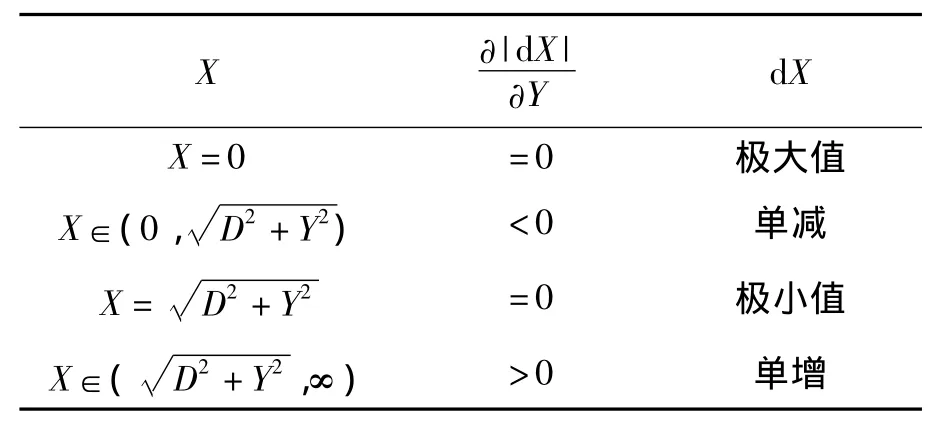
表2 X方向变化Tabel 2 Change in X direction
对于X轴方向的定位误差|dY|,易知其最小值位于X=0处.当目标偏离Y轴时,对Y向的定位误差增大.
结合以上分析可知:当目标远离Y轴运动时,X轴方向定位误差先逐渐减小后呈二次函数形式急剧增大,Y轴方向定位误差呈一次函数形式增大;目标沿远离X轴运动时,Y轴方向定位误差恒定不变,X轴方向定位误差先减小后逐渐增大最终趋于无穷.可见当目标离测量点较远时会出现测量误差发散的现象,实际操作时应对定位目标所处区域进行限定以保证定位精度.根据定位误差空间分布特点,当目标的横坐标限于两测点之间带状区域内时,可保证X、Y轴向定位误差不会发散;同时为避免目标过于靠近或远离测量基线导致X轴向定位误差发散,还需对目标纵坐标范围予以限定,具体范围应根据实际情况利用式(11)确定.因而划定了矩形的两测量点的纯方位定位高精度区,如图2所示,其宽度为基线长,长度需要根据实际误差要求利用利用式(11)计算确定.
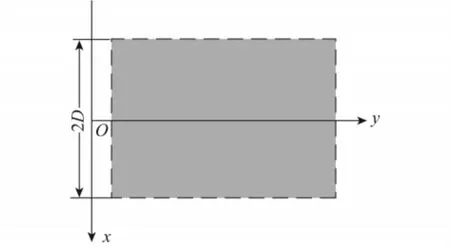
图2 两测量点纯方位定位矩形高精度区Fig.2 Two measure-pionts bearing-only rectangle positioning high accuracy area
3 直线航迹与圆弧航迹定位性能
根据两测量点纯方位定位误差分布,可对直线测量航迹与圆弧测量航迹的性能进行分析,进而得到超短基线纯方位定位操作的最佳航迹.
3.1 直线航迹定位性能
根据式(11)~(12)可得对目标X轴方向与Y轴方向定位误差的关系式:

式中:k=X/2Y,b=-(Y2+D2)/Y.说明 X、Y 轴方向定位误差呈标准的直线关系,其物理含义:方位测量误差会导致目标定位结果沿式(13)描述的直线偏离真实位置,偏离大小可用式(11)和(12)估计.上述现象会导致以直线航迹进行定位时得到较差的定位结果,如图3所示.

图3 直线航迹定位性能示意Fig.3 The line track posiotioning characteristics
当以直线航迹进行定位时,仅有中间的一段基线可保证目标位于定位高精度区内.而对于其他各段基线,目标均位于其高精度区域外.随着测点越远离中轴线,目标越偏离其高精度区域,定位误差越大,定位结果以式(13)描述的方向偏离越为明显,即沿图中箭头方向偏离真值越远.最终经过直线上各个相邻测点的定位,定位结果最终会呈现“×”状分布.
3.2 圆弧航迹定位性能
若采用圆弧航迹对目标定位,由于圆弧航迹具有中心对称性,目标始终位于航迹相邻两测量点的中垂线上.结合上文推导可知,此处对应纯方位定位的测量高精度区域,对目标定位误差较小,不会出现类似于直线航迹发散的定位结果,较直线航迹更适于在对目标高精度定位时使用.
以下通过对直线、圆弧航迹定位误差的定量计算证明上述结论.计算中使用了测点分布方式不同的2种直线航迹与圆弧航迹比较,分别为:直线上相邻测点间距恒定且与圆弧上测点间距相等,如图4(a)所示;直线上相邻测点与目标方位角差值恒定且与圆弧上测点角度差值相等,如图4(b)所示.

图4 圆弧航迹与直线航迹比较Fig.4 Comparison between the arc track and line track
假设圆上的测点以角度φ等间隔分布,目标与直线的水平距离为Y,则对于圆弧航迹上两相邻测点的水平定位误差为

对等间距直线行距上测点单侧编号,最靠近Y轴的测点序号为1,则直线上第N+1个与第N个测点的水平定位误差为

对于等方位角差值直线航迹,其上第N+1个与第N个测点的水平定位误差为
式(16)形式较为复杂,不易与式(14)直观比较,故根据式(14)和(16)对图4(b)所示的2种航迹定位误差差值进行数值计算,计算条件为:φ=5°,Y=50 m,dθ=0.05°,计算结果如图 5 所示.

图5 2种航迹定位误差差值曲线Fig.5 Positioning error difference of the two tracks
由图5可见,直线航迹与圆弧形航迹的误差之差同样随测点序号的增大而急剧增加.说明对于图4(b)所示的2种航迹,圆弧的定位性能更好.
综上,以直线作为定位航迹时,在目标逐渐偏离直线中垂线而靠近直线两端的过程中,相邻测点与目标方位角差值逐渐变小,更易受到测向误差的干扰而降低角度分辨性能,进而影响定位精度,导致在一个直线定位航次中定位结果起伏明显;使用圆形航迹测量全过程中可以始终保证目标位于定位高精度区内而使误差较小,且因在同一航次内目标与测点位置关系恒定而具有定位误差平稳的特性.因而在需要对丢失信标进行高精度定位时,应当采用圆弧航迹进行测量.
4 仿真与试验验证
首先利用计算机对建立的两测点纯方位定位模型的误差分布特性进行了仿真验证.
仿真条件如下:设定船只在水面,2个测点坐标分别为(-50,0)、(50,0),以两测点进行目标定位,目标位于水下50 m.超短基线定位系统存在0.05°的方向角测量固定偏差.改变目标的水平坐标,绘制对目标定位误差在300 m×300 m范围内的分布情况,如图6所示.

图6 定位误差空间分布Fig.6 Positioning error distribution
图6中的Z轴表示误差的幅值,图中在X轴线附近出现的空白区域是由于目标过于靠近基线时,定位误差过大而未予绘制的缘故.仿真计算结果与理论推导的关于两测点纯方位定位误差空间分布的结论一致,验证了定位高精度区域的存在位置与划定方式.
通过仿真比对直线航迹与圆弧航迹的定位性能.设定目标为坐标原点,位于水下80 m.对于标准圆弧航迹设定船只围绕应答器以50 m为半径进行的运动,每隔8°进行一次定位;对于直线航迹设定船只在直线 y=50 m上运动,运动范围为 X∈[-80 m,80 m],每隔5 m进行一次定位.系统存在入标准差为0.05°的高斯随机测向误差,图7为直线航迹与标准圆航迹的定位散点图.
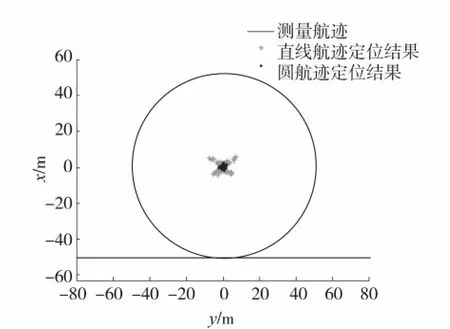
图7 直线航迹与圆形航迹的定位散点对比Fig.7 Comparison of the arc track and line track positioning results
由图7可见,直线航迹的定位结果呈现明显的“×”状散点,定位结果偏离目标真实位置最大可达8 m;而圆形航迹定位散点围绕在真值附近均匀分布于半径约为1.5 m的圆形区域内.仿真结果与理论分析结果相符,验证了直线航迹定位的不足,显示出以圆形航迹进行纯方位定位的优势.
2010年7 月,课题组利用自行研制并经多次试验验证的超短基线声学定位系统和应答器,在吉林省松花湖进行了超短基线定位试验.试验选用法国IxSea公司生产的OCTANS高精度姿态测量仪与Leica公司的RTK-GPS系统作为超短基线系统的外接辅助设备.超短基线定位系统声学基阵安装于船舷,入水约2 m;姿态测量设备安装靠近船重心;GPS天线固定在船后的顶部.安装后通过安装误差校准对各传感设备间的系统偏差进行了修正.
试验中声信标锚定于水底不动,深约50 m.分别采用半径为60 m的圆形测量航迹与长度为250 m的直线测量航迹对声信标进行定位测量.同时利用常规的超短基线定位方法对目标定位,以此结果作为参考.测量结果如图8所示.
通过图8(a)经对比可知:直线航迹的定位结果出现明显的发散现象,严重偏离常规USBL定位参考结果.在图8(b)的放大图中可以看到直线航迹定位结果略呈“×”状分布趋势,与理论及仿真结果吻合.相比之下,圆弧航迹的定位结果显著优于直线航迹,其定位结果以常规USBL定位参考值为中心呈半径为1 m的环状分布,其定位精度虽不及常规USBL定位结果,但定位误差明显小于直线航迹,验证了圆形航迹定位性能优于直线航迹的结论.圆弧航迹USBL方位定位结果与常规USBL定位结果的差距是由于定位算法本身对测量误差更为敏感,并且较常规方法缺少斜距信息导致的,但此时的定位精度已可满足确定丢失信标位置并实施打捞的实际需求.

图8 试验测试结果Fig.8 Experimental results
5 搜索航迹规划
通过上述理论推导、仿真计算、试验验证的方法证明了圆弧形航迹的纯方位定位精度优于直线航迹,适于在目标位置大致确定后对其进行精确定位;而直线航迹也有着行船快捷、覆盖范围大、搜索效率高的特点,适于在目标位置未知时进行大范围的搜索,为进一步精确测量目标位置提供参考坐标.因而在实际的声信标搜索打捞工作中采用“直线-圆弧”联合的搜索航迹.
1)船只在声信标丢失的可能区域内以直线航迹进行“Z”字型大范围搜索,直至超短基线检测到丢失目标的声信号.
2)保持船只航向,记录若干次的测量数据.利用检测到的方位信息进行纯方位定位解算,取定位较密集处定位结果的均值,记为坐标A,记录此时船只坐标为B.
3)操船以与AB连线45°左右夹角方向行进,行进同时继续定位直至船只航向与“船-A点”连线垂直.取定位点密集处定位结果的均值更新坐标A,以此时船只坐标更新B点坐标.
4)重复3)的操作2~3次后,以当前船只与A点的距离作为半径,船只绕A点做圆形航迹运动,同时对信标位置实时定位.
5)根据定位效果调整圆形航迹的半径,直至定位结果满足打捞作业要求,结束搜索定位作业.
以上搜索流程如图9所示,图中标号对应上述步骤.

图9 搜索目标航迹示意Fig.9 Target search track
6 结束语
研究了纯方位定位误差的空间分布特性,划定了纯方位定位的高精度区域.据此进一步分析了直线与圆弧形测量航迹的定位性能:圆弧形航迹的中心对称特性使目标始终位于测点中垂线上的高精度区而产生较小的误差,适于在目标位置大致确定后对其进行精确定位;直线航迹中随着目标靠近直线两端,定位结果出现“×”状分布,定位性能差于圆弧航迹,但其覆盖范围大、搜索效率高,适于在目标位置未知时进行大范围的搜索,为目标位置的精确测量提供参考坐标.从而最终为超短基线纯方位定位寻找丢失信标规划出一套采用“直线-圆弧”航迹进行搜索定位的方案,在保证搜索效率的前提下提高最终定位信标的精度.
[1]吴永亭,周兴华,杨龙.水下声学定位系统及其应用[J].海洋测绘,2003,23(4):18-21.WU Yongting,ZHOU Xinghua,YANG Long.Underwater acoustic positioning system and its application[J].Hydrographic Surveying and Charting,2003,23(4):18-21.
[2]吴学兵,刘志田,宁靖.海洋石油勘探水听器二次定位新方法研究[J].中国石油大学学报:自然科学版,2006,30(5):23-26.WU Xuebing,LIU Zhitian,NING Jing.A novel method study of hydrophone second positioning for oil exploration of ocean bottom [J].Journal of China University of Petroleum:Edition of Natural Science,2006,30(5):23-26.
[3]KEENER-CHAVIS P.Ocean exploration through NOAA:collaborations for excellence in exploration and education[C]//Proceedings of OCEANS 2003,Baltimore,USA,2003:1561.
[4]陈雄洲,聂晓敏,付继伟.水下声学释放器的研制进展[C]//第五届中国国际救捞论坛.大连,中国,2008:272-276.CHEN Xiongzhou,NIE Xiaomin,FU Jiwei.The development of underwater acoustic releaser[C]//Proceedings of the 5th China International Rescue& Salvage.Dalian,China,2008:272-276.
[5]李想,孙大军,张殿伦,等.一种基于超短基线的信标定位方法[J].高技术通讯,2009(5):533-537.LI Xiang,SUN Dajun,ZHANG Dianlun,et al.A beacon positioning method based on USBL [J].Chinese High Technology Letters,2009(5):533-537.
[6]郑翠娥.超短基线定位技术在水下潜器对接中的应用研究[D].哈尔滨:哈尔滨工程大学,2008:39-46.ZHENG Cuie.Application of USBL positioning technology on underwater submersible interfacing[D].Harbin:Harbin Engineering University,2008:39-46.
[7]兰华林.深海水声应答器定位导航技术研究[D].哈尔滨:哈尔滨工程大学,2008:71-75.LAN Hualin.Research on positioning and navigation technique with underwater acoustic transponder in deep sea[D].Harbin:Harbin Engineering University,2008:71-75.
[8]隋海琛,田春和,韩德忠,等.水下定位系统误差分析[J].水道港口,2010,31(1):69-72.SUI Haichen,TIAN Chunhe,HAN Dezhong,et al.Error analysis of underwater positioning system [J].Journal of Waterway and Harbor,2010,31(1):69-72.
[9]SHIN Dong-ho,SUNG Tae-kyung.Analysis of positioning errors in radio navigation systems[C]//IEEE Intelligent Transportation Systems Conference.Oakland,USA,2001:156-159.
[10]TENNINA S,DI RENZO M,GRAZIOSI F,et al.Statistical analysis of positioning error distribution in wireless sensor networks[C]//Third International Conference on Communication and Networking.Hangzhou,China,2008:619-624.
[11]SAANNGEON W,AFZULPURKAR N,BHURIPANYO J.Adaptive geometry track design and implementation for an all terrain mobile robot[C]//IEEE International Conference on Robotics and Biomimetics.Bangkok,Thailand,2009:413-418.
