机载泵源系统的恒功率H∞镇定控制策略
2012-06-22何刘宇李运华刘国建
何刘宇 李运华 刘国建
(北京航空航天大学飞行器控制一体化技术重点实验室,北京 100191)
机载泵源系统的恒功率H∞镇定控制策略
何刘宇 李运华 刘国建
(北京航空航天大学飞行器控制一体化技术重点实验室,北京 100191)
以机载泵源系统的恒功率控制为目标,针对作业任务中系统负载随时间变化的情况,采用使液压系统输出功率保持恒定的控制方式来达到充分利用发动机功率的目的.对于机载泵源控制系统的主要被控对象——轴向柱塞式变量泵,建立了其状态方程和流量输出方程,采用H∞鲁棒镇定控制策略实时调节泵的排量.仿真结果表明:当负载变化时,系统能根据压力的变化快速转换到恒功率工作曲线下对应的流量状态,所设计的H∞控制器能够减小干扰和模型参数不确定对系统稳定性的影响,具有良好的鲁棒性.表明该方法用于机载液压系统可以改善系统工作性能,提高系统功率的利用率.
恒功率调节;变量轴向柱塞泵;H∞鲁棒控制;机载泵源系统
在车辆、自行式工程机械和大型飞行器等运动体机械的机载液压系统中,充分利用发动机功率和减少功率损失是一个重要的研究课题.对于机载液压系统,若原动机没有工作在高效区,会造成能量损耗和无效功率的增加并导致系统温度急剧升高,温升会加快介质的老化和机内零件的膨胀,影响系统的正常工作.无效功率同时也增加了发动机的燃油消耗,降低运动体机械的续航能力[1].国外很早就开始了机载及行走机械智能变量泵源的研制,可使系统在变负载的情况下尽可能充分利用功率,减少能耗,达到动力源与负载最佳的功率匹配.对于飞机及行走机械所装备的移动液压系统,其能量储备有限,因此提高功率利用和减少功率消耗显得非常重要[2].
恒功率泵源能够充分利用发动机提供给泵源的功率,降低发动机的能耗,依靠变量泵的变量机构,根据负载的变化调整输出流量,使泵的输出功率维持恒定.在这类系统中,存在液压系统的固有特性引起的模型中部分参数的不确定性和负载的突变给系统带来的干扰力,它们都会影响系统的鲁棒性和控制精度[3].恒功率泵源系统要求变量泵尽可能快速无超调地根据负载的变化实时调整输出流量,并在系统受到外界干扰的时候,能保持系统恒功率镇定.
H∞控制理论是20世纪80年代初由加拿大学者提出的,以控制系统内某些信号间的传递函数矩阵的H∞范数为优化性能指标的鲁棒控制设计理论[4].它能很好的抑制外部扰动和模型不精确情况下对系统性能的影响,是提高系统鲁棒性的有效途径.近年来国内外已出现对液压伺服系统及泵源系统采用 H∞控制策略的研究[5-6].
本文根据变量柱塞泵工作机构的特点,建立了系统的状态方程和排量输出方程.采用H∞算法设计控制器调节泵的排量,达到了较满意的控制效果.
1 恒功率机载泵源系统基本构成
在泵转速不变的情况下,排量调节是系统主要调节方式,变量泵能够根据负载的变化情况实时调整输出流量,使泵的输出功率与系统设定的功率匹配,并能在工作中保持恒定的功率.图1为机载恒功率泵源系统的基本构成.
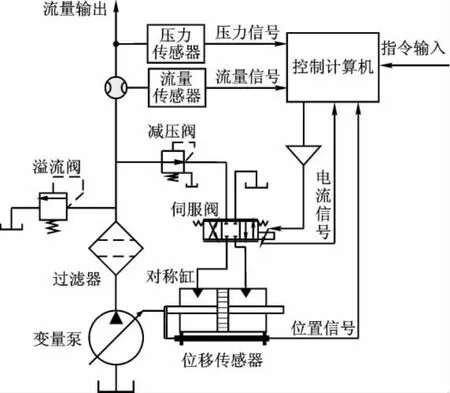
图1 机载恒功率泵源系统基本构成
当外界施加的负载发生变化时,引起系统压力变化,压力传感器将压力信号传送至控制计算机,控制器根据恒功率控制策略,将对应的电流信号输送给变量泵的伺服机构,通过阀控对称缸推动斜盘并改变斜盘摆角,使泵的输出流量产生变化,从而使整个系统保持在恒功率状态运行.
2 被控对象数学模型的建立
在整个机载泵源控制系统中,恒功率控制的执行机构是由伺服阀控制的对称液压缸组成的变量机构,其方块图如图2所示.控制器输入控制电压u,经伺服驱动器转化为驱动伺服阀所需要的电流信号,输出信号是泵的排量qs.
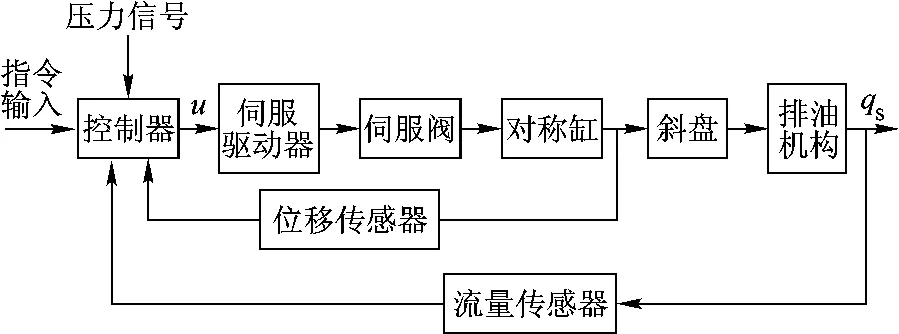
图2 控制系统基本框图
整个变量机构的数学建模包括伺服驱动器与伺服阀建模、阀控对称缸的建模和斜盘及液压泵排油机构的建模[7]等3部分.
2.1 伺服驱动器和伺服阀的建模
伺服驱动器和伺服阀比变量泵斜盘的响应要快得多,可以看作为比例环节.从伺服驱动器到伺服阀阀芯位移的支配方程为

其中,I为放大器输出电流;Ki为放大器与线圈电路增益;Ksv为伺服阀增益;xv为伺服阀的阀芯位移.
2.2 阀控对称液压缸的数学模型
对于阀控对称液压缸,根据滑阀阀口流量方程、液压缸流量连续方程和变量活塞力平衡方程,综合得到阀控对称缸的数学模型.阀控对称缸结构如图3所示.
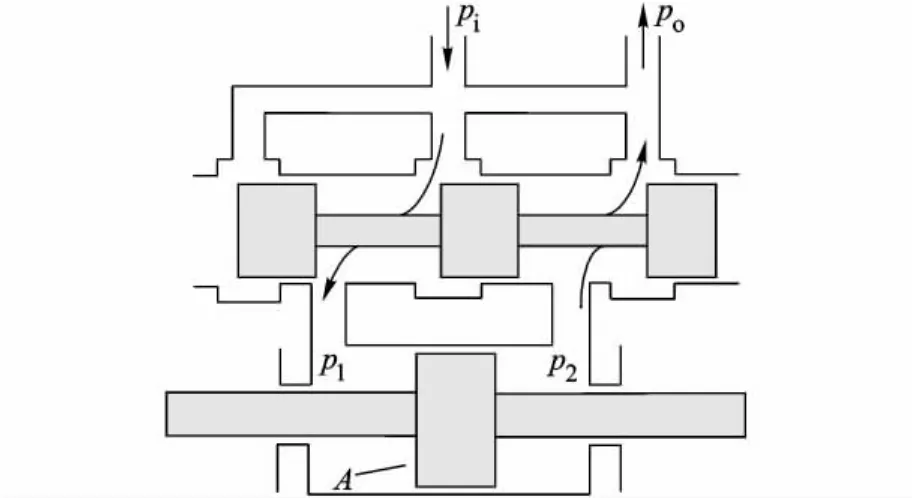
图3 阀控对称缸结构图
1)滑阀阀口的流量方程.由阀口的流量连续性方程并将其在工作点附近线性化得

其中,qL为负载流量;pL为负载压差;Kq为阀流量增益系数;Kc为阀流量压力系数.
2)对称液压缸的流量连续方程.变量柱塞泵的斜盘由液压缸的活塞杆驱动,对于采用对称缸驱动的情况,两腔的有效面积相等.对称缸驱动时液压缸有效面积取为两腔有效面积之和的1/2.经推导,液压缸的流量连续方程为

其中,E为油液等效体积弹性模量;Vt为两个油腔总容积;Lc为液压缸內泄漏系数;y为活塞位移.
3)变量活塞的力平衡方程增量形式为

其中,M为活塞及负载总质量;R为粘性阻尼系数;Fv为变量活塞推动斜盘作用力.
2.3 斜盘及液压泵排油机构的数学模型
1)柱塞泵斜盘工作机构如图4所示,根据斜盘的受力关系,其力矩平衡方程的增量形式为

其中,J为斜盘转动惯量;α为斜盘倾角;Lf为Fv的力臂;B为粘性阻尼系数;Ks为弹簧刚度;Kz为相对力臂系数;Mr为外界负载干扰产生的力矩.
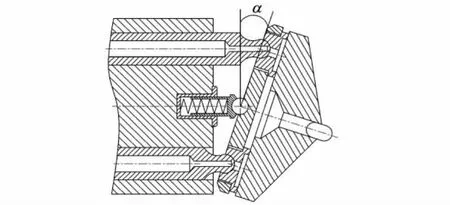
图4 斜盘机构剖面图
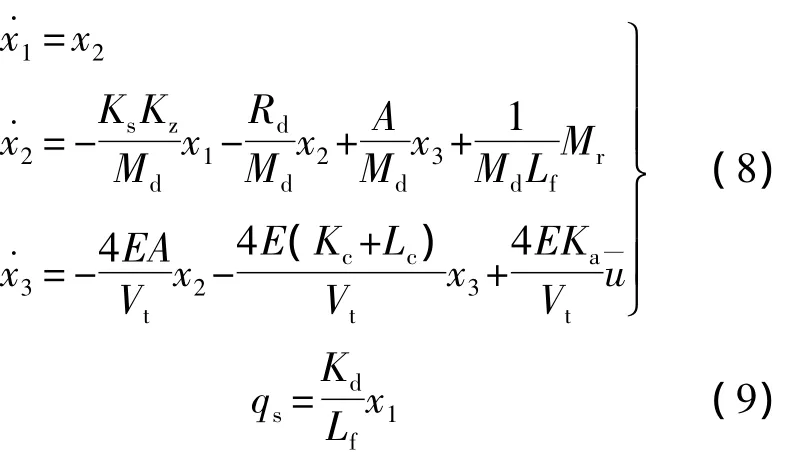
2)将轴向柱塞泵的流量方程线性化得


综合以上各方程,定义被控对象的无量纲状态变量x1=Δy,x2=Δ˙y,x3=ΔpL.令¯u=Δu,可得到描述对象动态特性的状态方程和输出方程为

3 系统恒功率H∞镇定控制器设计
3.1 控制目标
机载泵源恒功率控制系统的目标是使泵在设定的情况下能保持恒定的输出功率.无论何种变量泵,排量调节是基础,在转速恒定的情况下,流量调节是其最基本的调节方式.当外界施加给的负载较小时,增大泵的排量,油缸进给(返回)速度加快;当外界施加给的负载变大时,相应减小泵的排量,油缸进给(返回)速度减慢.在忽略整个系统的沿程压力、流量损失的情况下,系统恒功率表达式为

其中,N为系统的总功率;P为系统的压力;Q为泵的输出流量;Ff为外界负载力;V为油缸活塞运动速度.
系统恒功率控制的压力-流量曲线为双曲线,图5为泵的实际静态工作曲线,在其最大和最小功率曲线之间设定系统的恒功率工作曲线.
系统输入给伺服阀的电压满足关系式为
其中,KN为转换增益系数,依实际系统情况进行调整.
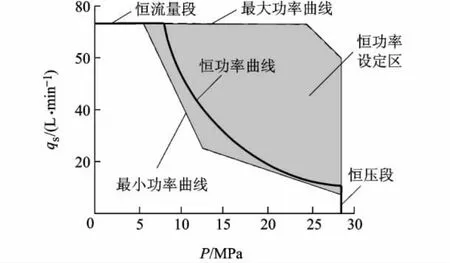
图5 变量泵静态工作曲线
整个系统的控制分为两步:第1步为确定恒功率控制对应的给定量,主要依据是双曲线型的系统压力-流量曲线;第2步是通过以变量泵为模型的线性系统调节实现恒功率控制.这样就可以按线性系统处理使输出功率保持恒定的镇定控制问题.
3.2 标准H∞控制问题描述
基于H∞控制理论设计控制系统,就是求反馈控制器使闭环系统稳定且闭环传递函数阵的H∞范数最小或者小于某一给定值.H∞最优控制问题就是利用研究对象的数学模型G(s)设计控制器,为使系统渐进稳定,消除干扰信号影响,利用增广对象模型来设计控制器K(s),使得K(s)在稳定被控对象的同时,使外部输入到观测输出的函数矩阵Tzw(s)的H∞范数最小[8].
H∞标准控制框图如图6所示,H∞控制的目标就是寻求系统的最优控制矩阵K(s).
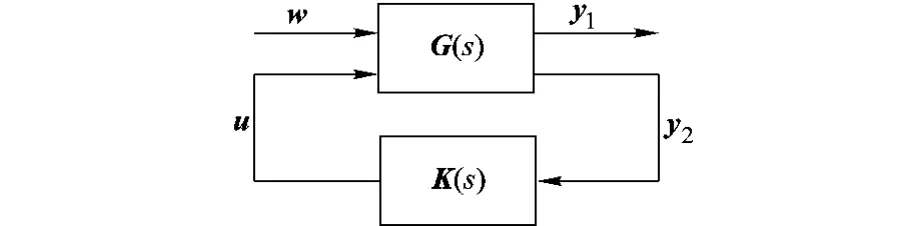
图6 H∞标准控制框图
3.3 H∞镇定控制器的设计
根据双端子状态方程对象模型结构,H∞最优控制器设计的目标是找到一个控制器,它能保证闭环系统的H∞范数能够限制在一个给定的小整数γ(γ0为γ最优值)下.满足关系式:


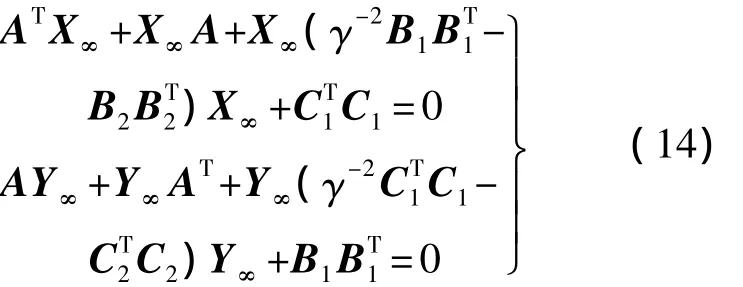
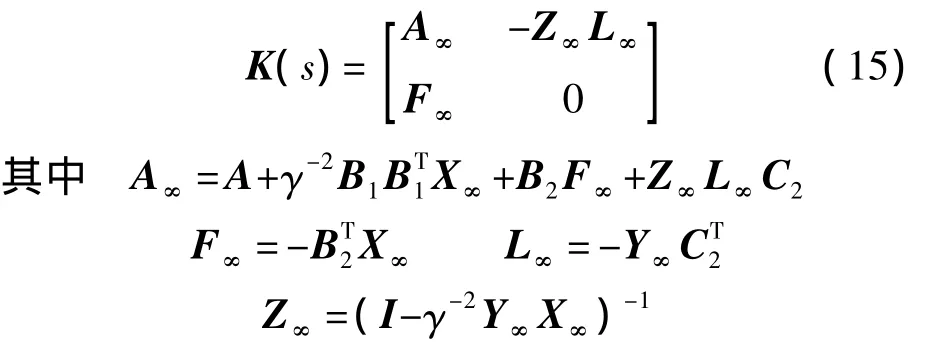
若上述条件成立,则使闭环内稳定且使‖Tzw(s)‖∞<γ成立的输出反馈动态控制器为
为获得系统最佳控制性能,需要引入加权函数对系统性能指标进行约束和优化,加权函数的使用可有效抑制干扰、改善系统频率特性和限制乘性不确定性.加权函数的双端子结构框图如图7所示.
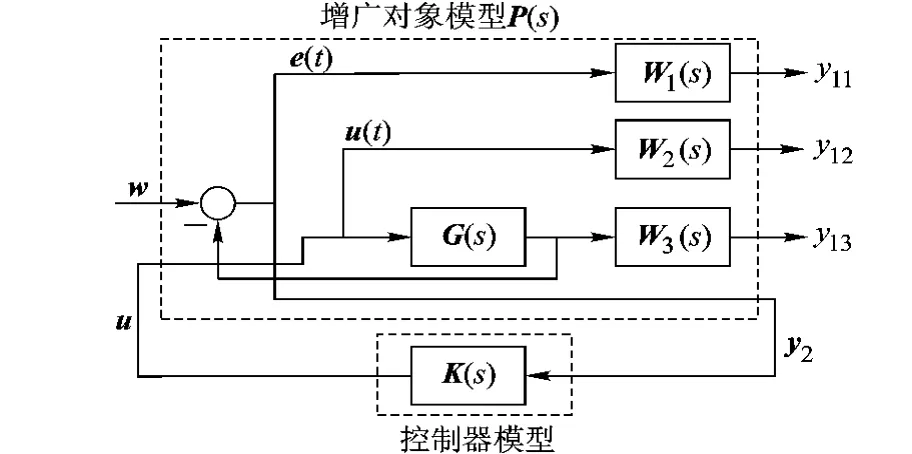
图7 系统加权函数双端子结构框图
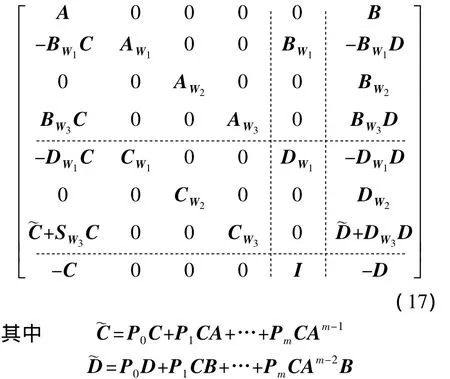
设定系统对象模型状态方程为(A,B,C,D),W1(s),W2(s)的状态方程模型分别为(AW1,BW1,CW1,DW1),(AW2,BW2,CW2,DW2),W3(s)容许为非正则,其模型可表示为多项式:

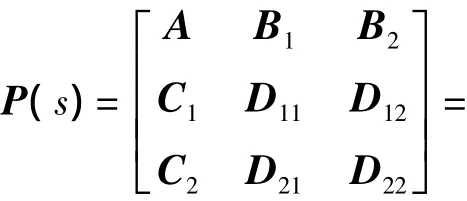
多项式等式右边第1项指W3(s)的状态空间模型(AW3,BW3,CW3,DW3)是传递函数模型的主项,其它为追加的多项式项.根据系统各部分的对应输入输出关系,分别定义x1,x2,x3为状态空间W1(s),W2(s),W3(s)中的状态变量.加权增广对象P(s)的状态空间模型表示为
4 仿真分析与测试
针对本文所设计的控制器,选取一实际使用过的变量柱塞泵的参数作为分析测试对象,泵的主要参数如表1所示.
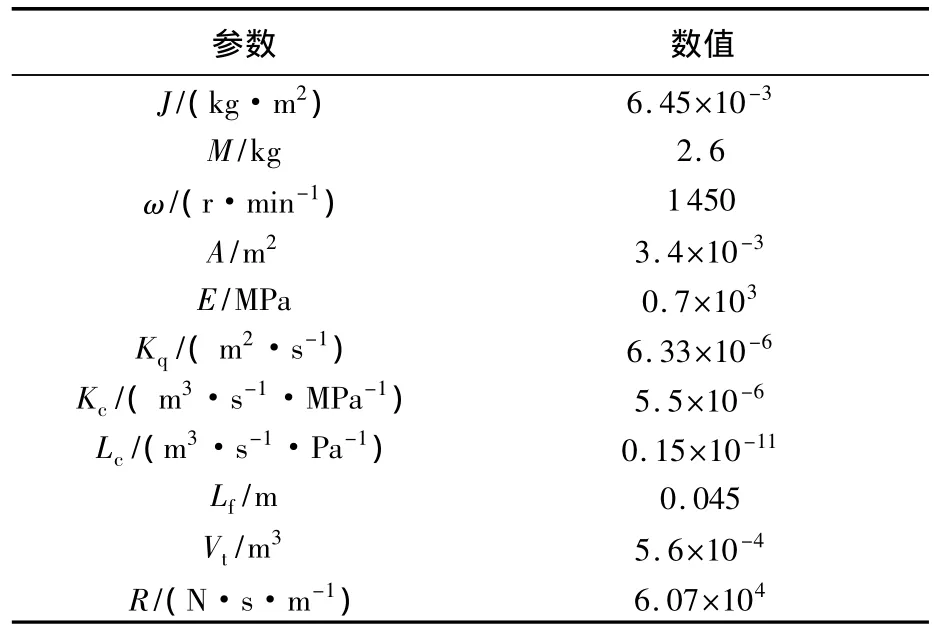
表1 变量柱塞泵的主要参数
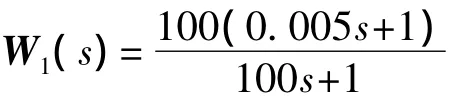
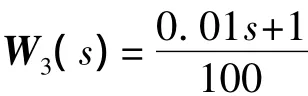
将泵的参数代入公式中,由泵的特性选择加权函数 W1(s),W2(s),W3(s).加权函数 W1(s)代表干扰的频谱特性,能有效抑制不确定因素带来的干扰,良好地跟踪输入信号.W2(s)表示加性摄动范数界,用于限制控制量的大小,避免实际使用时产生饱和.W3(s)表示乘性摄动范数界,反映系统的鲁棒稳定性,应具有高通滤波特性[9].
根据系统对有效抑制干扰和精确跟踪输入信号的要求,W1(s)的选取一般应使系统具有低频高增益的特性,这里选取
根据柱塞泵的特性,W3(s)的选取反映系统的鲁棒稳定性要求,即具有高频特性,一般要求有高通滤波特性,这里选取
加权函数W2(s)可以起到对控制器输出限幅的作用.在一般系统的鲁棒控制中,W2(s)可以按经验不作选取,但在本系统中,当对u(t)不作加权时,经计算指出矩阵D12不满秩,无法设计出控制器.经分析,对于系统的加权增广对象模型P(s),如式(17)所示,系统需满足使P(s)中的矩阵D12为满秩矩阵,即使得

因此,为W2(s)选取一个小的标量值,反复试求,取W2(s)=10-5时D12能够较好的满足要求.
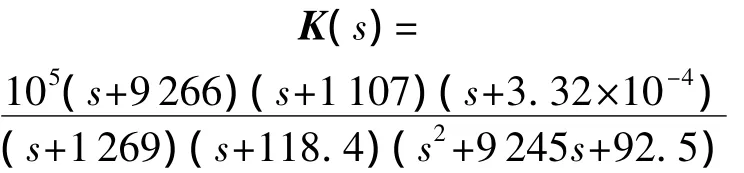
利用MATLAB软件中的鲁棒控制工具箱[10],求得系统的H∞控制器K(s)的传递函数为
求得控制器后,对系统进行稳定分析,系统的伯德图如图8所示.已验证系统开环模型是稳定的,伯德图的相位曲线在幅值曲线进入负值后穿越-180°线,闭环系统是稳定的.

图8 开环系统伯德图线
系统的尼柯尔斯图线如图9所示.已验证系统的开环模型是稳定的,曲线远离6 dB曲线,系统的动态响应性能满足要求.
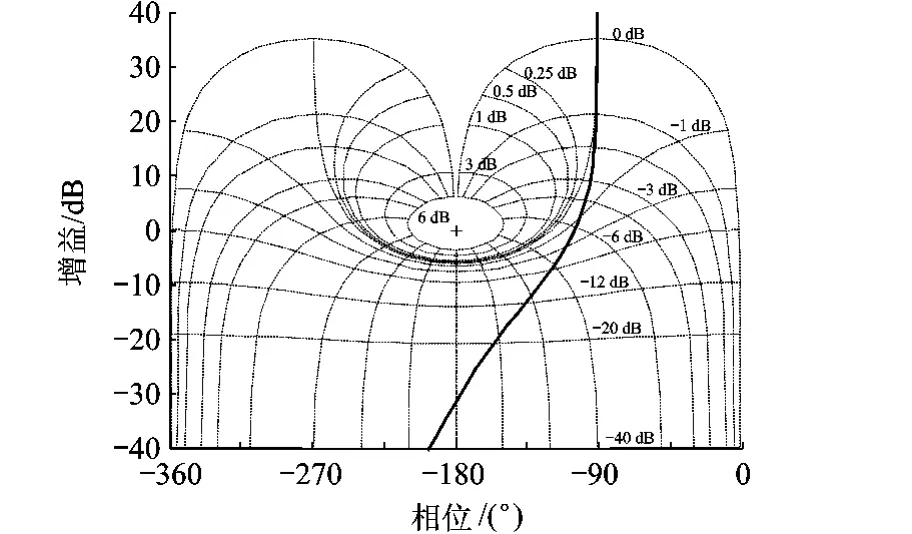
图9 系统开环Nichols图线
在N恒定的情况下,Ff越大qs越小.为系统施加180 kN,230 kN和270 kN的负载力时,系统的响应曲线如图10所示.当施加180 kN负载力时,调整时间约550 ms,稳态精度约0.02 L/min.当施加230kN和270kN的负载力时,调整时间约500 ms,稳态精度约 0.015 L/min.
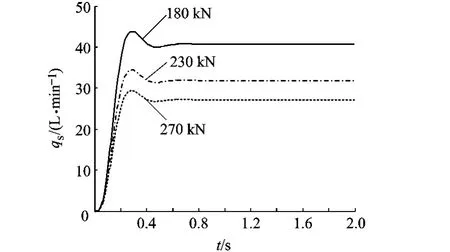
图10 系统在不同负载力下响应曲线
在qs稳定的状态下,为系统施加40%,25%,10%的瞬变负荷时的曲线如图11所示,qs很快减小到最小值.由于H∞调节器的作用,qs经过波动后,快速恢复到所设定的范围内,稳定时间约为550 ms.通过仿真可以看出:运用H∞调速器后,系统的稳定时间缩短,动态精度提高,有利于执行机构动作的稳定.
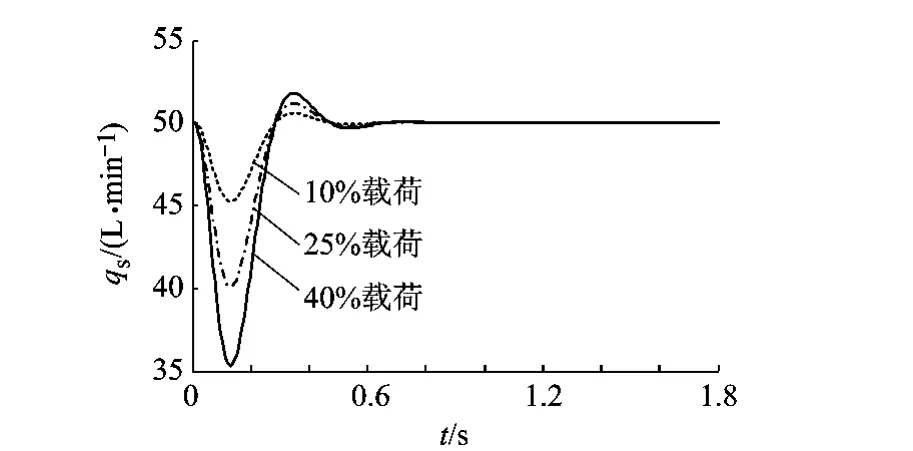
图11 施加瞬变负荷时系统流量动态响应
系统恒功率输出性能在以F2812为控制核心的硬件平台上进行了测试,表征系统压力、位移的电压信号经AD芯片采样后传输给数字信号处理器,控制器进行恒功率控制运算后输出对应的电流信号控制阀控缸运动.由泵源流量输出方程可知液压缸位移与泵输出流量之间为线性比例关系,仅差一个比例系数,可以通过检测位移信号求得对应的表征流量的信号,测试系统的恒功率特性.设定N=15.25 kW,当 Ff出现变化,P从原有的22.5 MPa降低到18 MPa时,表征qs随之上升,从原来的40.6 L/min,经过短期波动最终稳定在51.0 L/min附近,与设定的功率基本吻合.系统的调节时间和动态特性满足使用需要.
5 结论
通过对柱塞泵内部结构分析,建立了系统状态方程数学模型,并在分析系统模型参数和考虑外界的瞬变干扰力的情况下,采用H∞控制理论为机载泵源系统的恒功率镇定控制设计了控制器.仿真测试结果表明:系统具有很好的动态性能.机载泵源的恒功率控制既充分利用了发动机的功率,又提高了系统精度和抑制扰动的能力,增强了运动体机械执行作业任务时的稳定性.证明该策略用于机载泵源恒功率控制是可行的.
(References)
[1]李运华,王占林.机载智能泵源系统的开发研制[J].北京航空航天大学学报,2004,30(6):493-497
Li Yunhua,Wang Zhanlin.Development of airborne intelligent power supply system[J].Journal of Beijing Uinversity of Aeronautics and Astronautics,2004,30(6):493-496(in Chinese)
[2]Wilber A,Enrico C,Stefano M.Embedded model control applied to mobile hydraulic systems[C]//Proceeding of 18thMediterranean Conference on Controland Automation (MED).Piscataway:IEEE Computer Society,2010:715-720
[3]Skarpetis M G,Koumboulis F N,Tzamtzi M P.Robust control techniques for hydraulic acatuators[C]//Proceeding of 2007 Mediterranean Conference on Control and Automation(MED).Piscataway:Institute of Electrical& Electronics Engineers Inc,2007:1-6
[4]Zames G.Feedback and optimal sensitivity:model reference transformations,multiplicative seminorms, and approximate inverses[J].IEEE Transaction on Automatic Control,1981,26(2):301-320
[5]Lee J M,Park S H,Kim J S.A robust control of the pressure in a control-cylinder for the variable displacement axial piston pump[C]//Proceeding of 2009 7thAsian Control Conference.Piscataway:IEEE Computer Society,2009:1280-1285
[6]Dean P T,Fales R C.Modern control design for a variable displacement hydraulic pump[C]//Proceedings of the American Control Conference.Piscataway:Institute of Electrical& Electronics Engineers Inc,2007:3535-3540
[7]宋俊,王淑莲.液压元件优化[M].北京:机械工业出版社,1999:252-262 Song Jun,Wang Shulian.Hydraulic component optimal[M].Beijing:China Machine Press,1999:252-262(in Chinese)
[8]王德进.H2和H∞优化控制理论[M].哈尔滨:哈尔滨工业大学出版社,2001:55-76
Wang Dejin.H2and H∞optimization control theory[M].Harbin:Harbin Institute of Technology Press,2001:55-76(in Chinese)
[9]黄曼磊,王常虹.船舶电站柴油机 H∞调速器的仿真研究[J].电机与控制学报,2006,10(2):125-129
Huang Manlei,Wang Changhong.Simulation research on H∞speed governor for diesel engine of ship power station[J].Electric Machines and Control,2006,10(2):125-129(in Chinese)
[10]薛定宇.反馈控制系统设计与分析-MATLAB语言应用[M].北京:清华大学出版社,2002:329-336
Xue Dingyu.Feedback control system design and analysis-MATLAB language application[M].Beijing:Tsinghua University Press,2002:329-336(in Chinese)
Constant power H∞stabilization control strategy on airborne pump supplying system
He Liuyu Li Yunhua Liu Guojian
(Science and Technology of Aircraft Laboratory,Beijing University of Aeronautics and Astronautics,Beijing 100191,China)
Taking the constant power control of the airborne pump supplying as the goal,and addressing on the load variation during the process of the operation,the control strategy for keeping the output power constant to increase the utilization degree to the power of the engine was used.For the main controlled plant of the airborne pump supplying system with the variable displacement axial piston pump,the state space equation and flow output equation were built and the H∞robust control strategy was used to regulate the flow of variable displacement pump.The simulation results show that the system could quickly return to a new flow state corresponding to constant power working curve when the load was changed.The H∞controller can decrease the affections from the disturbance and uncertain parameters for the system stability and can be of a strong robustness.It could improve working performance and utilization degree of the system.
constant power regulation;variable displacement axial piston pump;H∞robust control;airborne pump supplying system
V 245.1;TH 137.51
A
1001-5965(2012)02-0202-06
2010-10-20;< class="emphasis_bold">网络出版时间:
时间:2012-02-21 11:46;
CNKI:11-2625/V.20120221.1146.014
www.cnki.net/kcms/detail/11.2625.V.20120221.1146.014.html
国家自然科学基金资助项目(51075016)
何刘宇(1982-),男,河南洛阳人,博士生,zilong6442@sina.com.
(编 辑:刘登敏)