声传感器阵列的实验研究*
2012-06-10葛晓洋张国军杜春晖张文栋
葛晓洋,张国军* ,杜春晖,张 慧,张文栋
(1.中北大学仪器科学与动态测试教育部重点实验室,太原030051;2.电子测试技术重点实验室,太原030051)
海洋是地球的蓝宝石,21世纪的人类将更多地依靠海洋资源。由于海洋的特殊环境,人们一般仅能借助于遥感遥测获取和发送水下信息。迄今所熟知的各种能量形式中,声波在海洋中有最佳的远距离传播性能。因而水声就成为海洋中信息传播的主要载体[1]。声源发出携带信息的声波,通过海洋到达水声接收传感器或传感器阵,连同海洋环境噪声被传感器转换为电信号,经过信号与信息处理,对目标存在与否做出判决,确定目标的个数、状态参数、种类,或者恢复目标发出的源信息。
声压水听器的研制成功解决了科学实践的许多问题,现有的水声系统尤其是声呐,都为声压信息处理系统[2]。但是,随着人们对海洋研究的深入,声压水听器的不足越发体现出来。在测量微弱低信噪比信号时,常用的最直接有效的方法就是采用水听器阵列,通过空间滤波获得空间增益,从而提高检测性能。但是随着频率的降低,如要保持一定的增益及束宽,阵元间距会越来越大,从而导致基阵庞大,不易实现。而且常规拖曳线列阵存在对目标方位分辨左、右舷模糊问题[3]。基于声压阵发展已经很成熟的现状,要解决声压阵存在的问题,人们必须从原理上进行改进,为此研制出能同时共点的拾取声压和振速信息的矢量水听器[4]。目前,矢量水听器是国内外水声传感器研究的重点[5]。小尺度矢量阵即可达到大尺度声压阵的测向性能,单个矢量水听器即可分辨两个同频信号。本课题组研制的一种MEMS硅微仿生矢量水听器将压阻原理,MEMS技术,仿生技术结合到一起,是一种新方法新原理的尝试[6]。它具有体积小,灵敏度高,低频检测性能好,指向精度高,有良好的“8”字型指向性等优点[7]。它以其高性能,低成本的优势顺应了目前的矢量水听器发展趋势和需求。MEMS矢量水听器被尝试着应用于鱼雷探测中,并取得了良好的效果。本文通过对矢量线阵与声压线阵的方位估计与阵增益的仿真与实验对比,得出矢量阵目标方位估计的优良性能、对水下运动目标的可靠跟踪能力及其可获得的高空间增益。
1 阵列仿真
1.1 阵列增益
声阵列的任务之一是判决信号的有无,即对信号进行检测。有目标时,接收到的为信号与噪声,无目标时,接收到的仅为噪声。当信噪比高时,传感器阵列对有用声信号的判断把握较大,当信噪比低时,对有用声信号的检测就困难一些。因此,阵列信号处理的一个较重的任务就是极力提高其输出信噪比,一个阵列的输出信噪比与该阵列的增益大小直接相关。研究阵列的增益就是研究这个阵列的检测性能。利用阵列能获得的空间增益是人们所关心的[8],所以,本文针对空间增益对标量阵与矢量阵进行研究。
1.1.1 声压阵增益
各向同性噪声场声压的空间相关半径为λ/2,λ为波长,所以,常用的声压基阵为半波长间距阵或大于半波长间距阵。这保证各阵元输出的各向同性噪声是互不相关的,而目标信号是相干的。声压阵基本波束形成为延时迭加,时域表达式为:

其中,M为时域数据点数,N为阵元个数。经计算,由式(1)可推出声压阵列的增益为:

其中,B为信号处理带宽,T为信号时间长度。
1.1.2 矢量阵增益
MEMS仿生矢量传感器具有低频性能好,灵敏度高,具有良好的“8”字形指向性等优点,由它所组成的阵列与声压阵列相比,就会具有更好的指向性及更高的增益[9]。
对于阵列而言,将波束形成后的声压振速分别表示为Pi,Vxi,Vyi,矢量传感器输出的振速均可电子旋转,所以还可得到其组合的输出为:

其中,θ为声源入射方位角。对上述量进行不同的组合就会得到不同的增益。根据之前的研究,根据波束指向性要具有主瓣窄、旁瓣低、抗目标方位左右舷模糊的优点,而且在波束最大方向有较高的增益,在平稳各项同性噪声背景下,的组合是最好的组合方式[10]。其组合增益为:

取阵元数为3,处理带宽为300 Hz时,声压阵、矢量阵的时间与增益的关系图如图1所示。由图可知,矢量阵的增益明显大于声压阵。
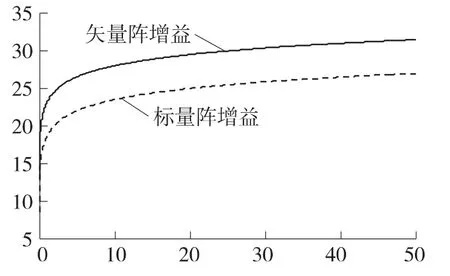
图1 阵列增益
1.2 阵列方位估计
1.2.1 声压阵的方位估计
对于阵列信号处理,一般所关注的问题之一是波束形成技术,即使阵列方向图的主瓣指向所需的方向[11]。对于声压阵一般采用延时加权相加的方法实现波束形成,通过预成多波束或者单波束扫描完成目标检测和估计,它所用的指向性因子是合成信号的平均功率,不存在指向性因子的形成,因而声波阵存在左、右舷模糊的问题,无法对信号的方位进行正确的估计。
仿真信号由两个正弦信号叠加而成,然后加入高斯噪声,信噪比为-10 dB。选取三个传感器组成阵列,阵元间距为1 m,目标方位定位60°。图2(a)所示为利用MUSIC算法对声压阵的方位估计。MUSIC算法可窄化波束,提高对目标方位估计的精度。

图2 阵列目标方位估计
1.2.2 矢量阵的方位估计
对MEMS仿生矢量传感器的定向算法仍选用波束形成法[12]。MEMS仿生矢量传感器在波束形成时,除了对不同阵元信号的空间相位延迟因子进行补偿外,还要对同一阵元的不同输出分量信号进行加权处理。因为矢量水听器同时获得了声压量与振速量,具有与频率无关的余弦指向性,该矢量传感器可以进行水平面或垂直面无模糊的波束扫描。而且,矢量阵对目标方位估计较声压阵压低了旁瓣。仿真条件与声压阵一致。图2(b)所示为矢量阵的方位估计。由图可看出,矢量阵克服了左右舷模糊的问题。
2 阵列实验
基于对声压阵标量阵的增益及其目标方位估计的仿真研究,本文进一步的进行实验对比研究。为了验证声压阵与矢量阵的的增益及其目标估计性能,课题组进行了多次外场实验。声压阵由标量水听器组成,矢量阵由课题组研制的MEMS仿生矢量水听器组成。实验环境为汾河二库,测试水域比较宽阔,水域较深,所以环境噪声较为理想可以认为是各向同性噪声场。实验采用的是线阵。声压阵与矢量阵均由三个阵元组成,各阵元间距为1.9 m。实验中水听器阵列固定于码头左侧,电磁罗经固定在水听器支架上,用来实时监视水听器自身姿态,保持基阵水平。每个声压阵阵元输出为声压信号,每个矢量阵阵元输出声压和x、y振速三路信号。发射换能器被固定在与测量基阵垂直的方位,阵列与换能器被吊深度均为水下6 m,两者间隔10 m左右,采样频率设置为20 kHz,阵列分布图及系统实验框图如图3(a)、3(b)所示。
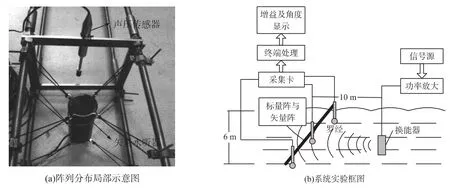
图3 阵列分布及测试系统
2.1 阵列增益
利用发射换能器发射频带宽为300 Hz的宽带信号。实验环境可看做为各项同性噪声。图4(a)、4(b)分别为声压阵与矢量阵的实验增益。由实验结果可知,矢量阵增益大于声压阵增益,与理论值吻合。由于实际操作与理论研究存在一定的误差,所以,实际得到的增益要小于理论增益。
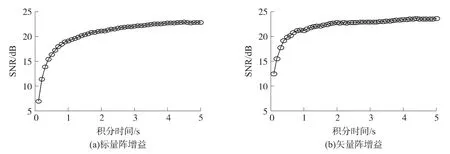
图4 阵列增益
2.2 目标方位估计
利用发射换能器发射500 Hz的单频信号,实验采用频域波束形成技术。由实验设置可知,目标在位于阵列90°方位处。图5(a)、5(b)所示分别为声压阵与矢量阵的目标方位估计。
由图5可知,矢量阵信号处理可消除左、右舷模糊的问题,且其定位更准确,抑制噪声能力强于声压阵。

图5 阵列目标方位估计
2.3 目标航迹跟踪
由§2.2可知,矢量阵可实现对静态目标的目标方位估计。为了验证两种阵列对水下动态目标的跟踪可靠能力,实验利用阵列对运动的船只进行轨迹跟踪。实验目标是某运动快艇,快艇航速为10 km/s,快艇在距离水听器阵列30 m远处航行,从水听器所指的0°开始围绕水听器作圆周运动。所取的时间段为0~18 s。图6(a)、6(b)所示为声压阵与矢量阵的时间方位历程图。

图6 阵列目标航迹跟踪
实验结果表明,矢量阵消除了声压阵的左、右舷模糊,能够有效的对船的目标航迹进行跟踪,其可靠性较声压阵高。
3 结论
本文基于新型MEMS仿生矢量水听器,创新性的对声压阵与矢量阵的增益及目标方位估计进行仿真,在此基础上,通过两者的对比实验进一步对仿真结果进行验证。仿真及实验结果表明,两者的实际增益均小于理论增益,矢量阵的增益较声压阵的增益大。在目标方位估计方面,仿真结果与实验结果一致,矢量阵可以克服声压阵所存在的左、右舷模糊问题,且矢量阵抑制噪声干扰能力较声压阵强,定位精度较声压阵高。矢量阵还可有效的对水下运动目标进行航迹跟踪。本文从理论仿真与实验验证两方面入手,验证了矢量阵的优越性,为今后MEMS仿生矢量水听器的工程化应用奠定了基础。
[1]吕钱浩.矢量传感器阵列技术研究[D].哈尔滨:哈尔滨工程大学,2004:1.
[2]陈新华.矢量阵信号处理技术研究[D].哈尔滨:哈尔滨工程大学,2004:1.
[3]赵羽.矢量阵阵处理研究[D].哈尔滨:哈尔滨工程大学,2004:1-2.
[4]王德俊.矢量声场与矢量信号处理理论研究[D].哈尔滨:哈尔滨工程大学,2004:2-3.
[5]许姣,张国军,石归雄等.纤毛式矢量水听器新型封装结构的研究[J].传感技术学报,2011,24(4):517.
[6]乔慧,刘俊,张斌珍等.一种新型压阻式硅微仿生矢量水听器的设计[J].传感技术学报,2008,21(2):301-304.
[7]樊姣荣,王晓瑶,刘文怡等.MEMS矢量水听器阵列信号处理研究[J].传感器与微系统,2012,31(1):14-17.
[8]杨德森,洪连进.矢量水听器原理及应用引论[M].北京:科学出版社,2009:134.
[9]陈尚,薛晨阳,张斌珍等.一种新型的MEMS单矢量水听器研究[J].兵工学报,2008,29(6):673-677.
[10]杨德森,洪连进.矢量水听器原理及应用引论[M].北京:科学出版社,2009:135-136.
[11]徐明远,刘增力.MATLAB仿真在信号处理中的应用[M].西安:西安电子科技大学出版社,2007:290-291.
[12]关凌纲,张国军,薛晨阳等.基于纳机电矢量水听器的水下目标估计[J].海洋技术,2009,28(2):43-45.