电动跑步机上步态特征获取系统的设计
2012-06-10杨先军李春丽刘建强王俊青孙怡宁
杨先军,李春丽,夏 懿,刘建强,王俊青,3,孙怡宁*
(1.中国科学技术大学自动化系,合肥230027;2.安徽省仿生感知与先进机器人技术重点实验室,中国科学院合肥智能机械研究所,合肥230031;3.中国科学院合肥物质科学研究院,合肥230031)
跑是人体水平位移的一种基本运动形式,是支撑相与摆动相交替、蹬与摆相配合的周期性运动[1],跑步机因其速度的稳定性及步数测量的无限制性,近年来被广泛用于走和跑过程中步态特征的研究[2-5]。中科院合肥智能机械研究所运动与健康信息技术研究中心研发的柔性阵列压力传感器已应用于数字跑道和数字跑鞋等领域,基于柔性阵列传感器研制的数字跑道能实时检测田径运动员训练时脚底与跑道接触的形状和时间等信息,从而获取运动员的步长、步频和动作时序等信息[6-8]。基于柔性阵列传感器的数字跑鞋,将传感器内置于鞋内,采集运动员的足底压力,应用于竞走运动中,实现了多角度观测运动员技术动作的目的[9]。本文提出一种新的方案,将研制的柔性阵列压力传感器应用到跑步机上,结合跑步机和柔性阵列压力传感器的优点,为在跑步机上获取运动员的步态信息提供了方便。同时,分析不同速度下的步态特征,为进一步研究如何在电动跑步机上实现速度自适应控制提供了很好的参考。
1 系统总体结构
系统总体结构包括主电机驱动模块、升降模块、心率模块、数据采集模块和平板电脑等部分。平板电脑作为上位机,通过人机交互界面对跑步过程进行控制,并完成数据的存储、分析和显示等。心率模块实时监测锻炼者跑步过程中的心率;主电机驱动模块接受上位机命令,驱动电机转动;升降模块接受上位机命令控制跑步机跑台的坡度,跑板固定在跑台上;数据采集模块包括数据采集电路及柔性阵列压力传感器,实时获取锻炼者跑步过程中足底与跑台之间的接触力信息及时序并发送至上位机,通过上位机软件分析计算步态参数.系统总体结构图如图1所示。

图1 系统总体结构图
2 数据采集与分析
2.1 数据采集部分构成
柔性阵列压力传感器采用上下两层结构,在上下层接触表面形成接触电阻,其接触电阻随接触面积和接触压力增大成准线性减小,通过检测电路检测出接触电阻的变化值,经过标定矩阵解算后就可以计算出相对应敏感单元或相应区域的压力值[10]。由4 800个压力敏感点按行列方式印刷构成传感器阵列固定在跑步机的跑板上侧,测量面积为120 cm×40 cm,采样频率 Fs为 100 Hz[11],如图 2 所示。
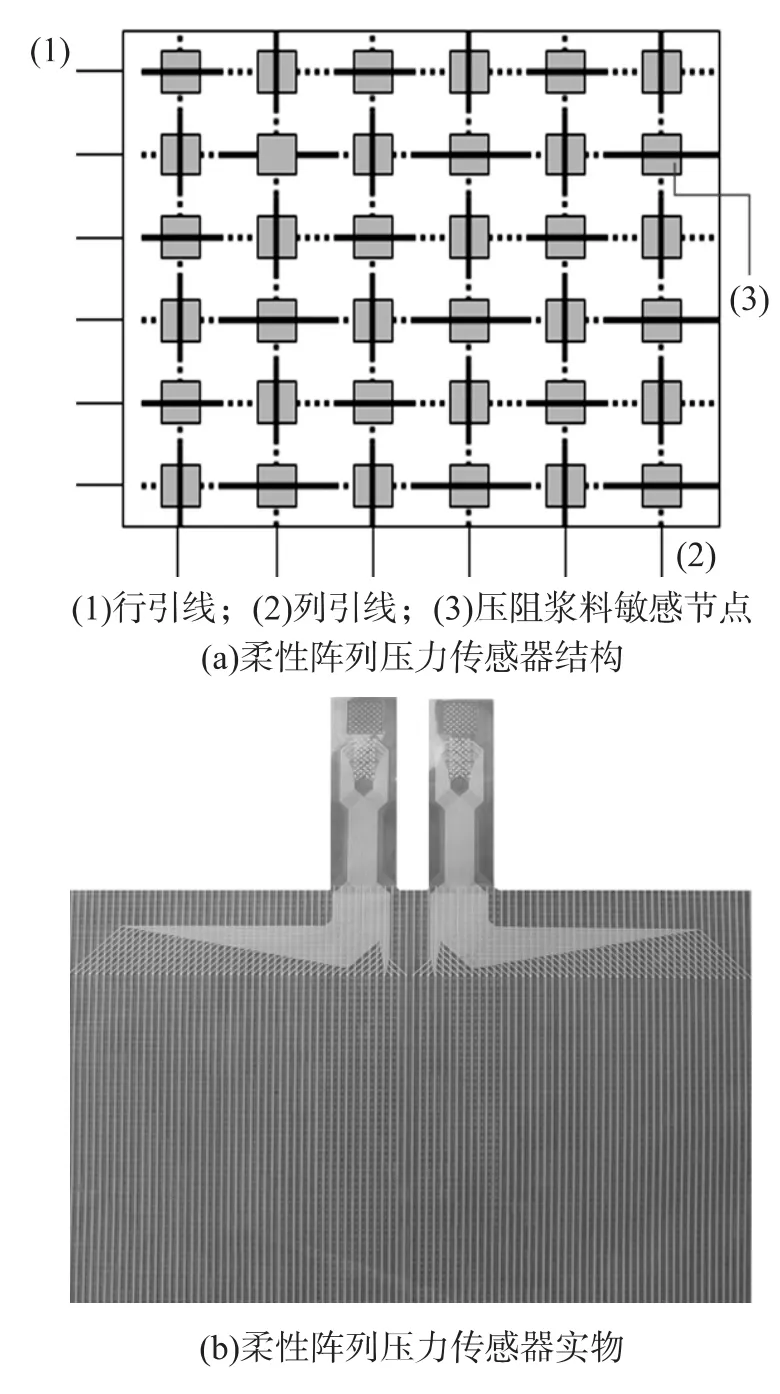
图2 柔性阵列压力传感器
基于柔性阵列传感器的数据采集模块早期采用CAN通信方式,但随着采样频率的增加、数据量的增大,CAN通信方式出现带宽不够,数据受限等问题,所以改为采用Ethernet通信方式,基于TCP/IP协议客户端和服务器模式,实现实时数据传输。流式套接字的优点在于它提供面向连接、可靠的数据传输服务,且按发送顺序接收数据。为此,我们在程序应用中采用流式套接字,保证接收到的数据的准确性。实际应用中上位机作为服务器,以STM32F单片机为控制核心的柔性阵列传感器的数据采集电路作为客户端。数据采集电路采用二次测量法[7]对传感器进行扫描,采集当前时间戳下对应的每一个压力点的压力值,然后按照如下数据格式,对压力数据进行组包并通过网口进行发送。

其中Time表示采集时刻的时间戳;Node表示压力垫编号;bSta是备用信息;Col表示列号;Row行号数据,__ELEMENT_SIZE__代表行单元数。
2.2 数据预处理
跑步过程中,双脚依次交替地踏在跑板上,数据采集部分采集单脚支撑期间的所有帧数据,发送至上位机分析软件。训练者在跑步机上跑的过程中,由于震动和电磁干扰等原因可能会产生一些杂点数据;另外,传感器回弹速度不够快也有可能产生干扰信号。因此,在进行步态特征提取前需要对原始数据进行去噪。因为采集到的数据形式上与灰度视频数据非常相似,因此,可以借鉴视频和图像数据处理中的去噪算法对原始数据进行去噪预处理[12]。
在形态学的处理中,使用同一个结构元素对目标图像先进行腐蚀运算,再进行膨胀运算的过程称为开运算[13],原图经过开运算之后,能够去除孤立的小点、毛刺和小的连通区域,去除小物体、平滑较大物体的边界,也不会明显改变其面积。设X为目标图像,B为结构元素,则结构元素B对目标图像X的开运算数学表达式为:X·B=(XΘB)⊕B。
然而,本设计中每一帧所包含的只是有效数据点,组合成图像之后,像素点较少,开运算并不能很好的滤去杂点。因此,基于开运算的思想,本文采用一种简单的基于窗口内有效值个数的去噪算法,算法原理是依次扫描某一个时间戳下的所有数据点,如果围绕某一个数据点的3×3的数据窗口中有效数据点(指压力值>0)的个数少于某一个值(目前是4个),那么就认为该数据点是杂点,予以剔除。

图3 去噪的结果
3 应用示例
3.1 参数获取
步长、步频和腾空时间是进行跑步技术分析比较敏感和有效的指标[14],本文从步长、步频、腾空时间及支撑时间这四个指标来分析训练者在跑步机上跑步的步态特征。将每只脚支撑期间所有帧的数据区域叠加,计算出整个支撑期间的区域范围,然后把最后一帧的时间戳(IDend)减去第一帧的时间戳(IDstart)乘以采样时间即为支撑时间Ton(ms),即

在跑步机上,步长SL(Step Longty)定义为每步的时间间隔乘以这段时间间隔内的平均速度加上前后两次脚跟着地点的距离之差[5],即当前脚着地时刻IDcurstart减去前一只脚离地时刻IDpreend乘以这段时间内的速度V(km/h),所得结果减去当前脚、前一只脚脚跟着地点的距离之差(Dcur-Dpre)即

步频SF(Step Frequency)是1 min内行走的步数,指从一只脚的脚后跟着地IDcurstart到另一只脚的脚跟着地IDprestart的时间间隔的倒数[6],即

腾空时间Toff(ms)是指从脚离地瞬间起到另一脚着地瞬间的时间[1],即

3.2 实验及结果
以一名39岁的男性长跑运动员(体重70 kg,身高175 cm)为例,我们分析了不同速度下的步态特征。为了保证受试者姿态自然,实验开始后,待受试者速度稳定,在不知会受试者的情况下开始数据采集[15],每一速度下采集完成后,休息5 min之后再进行下一速度下的实验。在不同速度下采集受试者稳定状态下80步的步态信息,并进行数据分析和对比,结果如表1和图4所示。

表1 不同速度下的测试结果
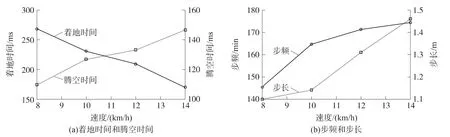
图4 不同速度下参数对比
由以上测试结果可以看出,随着速度的增加,单脚支撑时间在逐渐减小,单脚腾空时间在逐渐增加;该受试者在8 km/h速度时,步长比较小、步频都比较低,10 km/h速度下的步长和8 km/h的速度相差不大、但步频提高了很多,而在12 km/h速度下的步长和步频都有所提高,14 km/h速度下的步频和12 km/h速度下的步频相差不大,主要是通过增加步长来适应跑步机当前的速度。图4表明获取的参数范围及趋势与以往的研究结果是一致的[5,14],进而说明了该系统的传感原理、实现方式及参数获取算法都是正确的。
4 结论与展望
将柔性阵列压力传感技术应用到跑步机上,设计了一种新的在跑步机上获取步态特征的系统,从步长、步频、腾空时间及支撑时间这四个指标来分析训练者在跑步机上跑步的步态特征,该系统可以很好的获取训练者的步态特征。通过研究不同速度下训练者的步态特征,发现训练者会通过调整步频和步长以达到设定的跑步机跑速[14]。同时,训练者在不同速度下调整的方式是不同的,因此,该研究为今后在电动跑步机上实现速度自适应控制提供了很好的参考。
由于实验对象及实验条件的限制,测试结果并不能代表所有人的特征,本文还有需要改进的地方,如实验对象的选取(区别普通人和运动员、选取不同年龄段)、低速下的特征提取、长时间运动之后动作的变形等,后续研究将对这些方面进行改进。
[1]李鸿江.田径[M].2版,北京:高等教育出版社,2008.
[2]Alain Belli,Phong Bui,Antoine Berger,et al.A Treadmill Ergometer for Three-Dimensional Ground Reaction Forces Measurement During Walking[J].Journal of Biomechanics,2001,34:105-112.
[3]Verkerke G J,Hof A L,Zijlstra W.Determining the Centre of Pressure during Walking and Running using an Instrumented Treadmill[J].Journal of Biomechanics,2005,38:1881-1885.
[4]Patrick O Riley,Gabriele Paolini,Ugo Della Croce,et al.A Kinematic and Kinetic Comparison of Overground and Treadmill Walking in Healthy Subjects[J].Gait& Posture,2007,26:17-24.
[5]Kimberlee Jordan,John H Challis,KarlM Newell.Speed Influences on the Scaling Behavior of Gait Cycle Fluctuations during Treadmill Running[J].Human Movement Science,2007,26:87-102.
[6]撖涛,杨先军,马祖长,等.基于数字跑道的田径训练信息采集和反馈系统的设计与实现[J].体育科学,2008,28(9):70-73.
[7]赵兰迎.基于数字跑道的田径训练信息采集和发馈系统[D].中国科学技术大学,2007.
[8]赵兰迎,孙怡宁,周旭.基于CPLD的田径训练运动学信息采集系统[J].自动化与仪器仪表,2007(1):25-26,73.
[9]马霄珂.基于柔性传感器的数字运动鞋信息反馈系统的设计与应用研究[D].中国科学技术大学,2009.
[10]杨先军.柔性力敏传感及其应用技术研究[D].中国科学技术大学,2012.
[11]刘志,杨先军,姚志明,等.电子步道在步态时空参数测量中的可靠性[J].传感技术学报,2010,23(7):913-917.
[12]刘世法,周旭,孙怡宁,等.一种新型均值滤波器及在压力分布中的应用[J].计算机应用,2009,29(6):1728-1730,1747.
[13]刘海波,沈晶,郭耸,等.Visual C++数字图像处理技术详解[M].北京:机械工业出版社,2010.
[14]周华.优秀中长跑运动员途中跑的步态和步态特征的研究[D].山东体育学院,2007.
[15]王人成,朱德有,莫明军,等.行走和跑步两种步态模式的实验分析[J].中国康复医学杂志,2002,17(4):233-235.