棉花裸苗移栽机自动送苗机构的设计与仿真分析
2012-06-08符美军全腊珍熊耐新李桂文邹运梅
符美军,全腊珍,2*,熊耐新,李桂文,邹运梅,2
(1.湖南农业大学 工学院,湖南 长沙 410128;2.湖南省现代农业装备工程技术研究中心,湖南 长沙 410128;3.三一重工集团,湖南 长沙 410100)
随着棉花无土育苗技术的不断成熟,棉花裸苗移栽面积逐年扩大,实现机械化裸苗移栽不仅能提高生产效率、节省成本,还能大大降低劳动强度。目前,国内所研制的棉花裸苗移栽机大都采取人工送苗方式,劳动强度大且生产效率低,而日本研制的全自动裸苗移栽机,价格昂贵且有漏苗现象[1]。笔者以南通富来威公司生产的 2-ZQ4型半自动棉花裸苗移栽机为研究对象,拟设计一种能够实现横向和纵向送苗自动化的送苗机构,并加装苗盘空苗检测和送苗机构控制系统,减少因苗盘空苗而产生的漏苗现象。
1 送苗机构的设计
1.1 送苗机构的工作原理
送苗机构结构如图1所示。机构工作时,由电机(自带减速器)带动送苗机构中的锥齿轮转动,一方面,锥齿轮带动三销槽轮运动,三销槽轮带动圆柱凸轮转动,凸轮机构带动连杆横向运动,连杆带动苗盘完成横向送苗;另一方面,锥齿轮带动链轮转动,链轮带动单销槽轮,单销槽轮带动同步带轮转动,由同步带轮带动苗盘完成纵向送苗。当苗盘中出现空穴时,由检测系统发信号给机构控制系统,控制电机加速转动,由送苗机构带动苗盘快速移动。
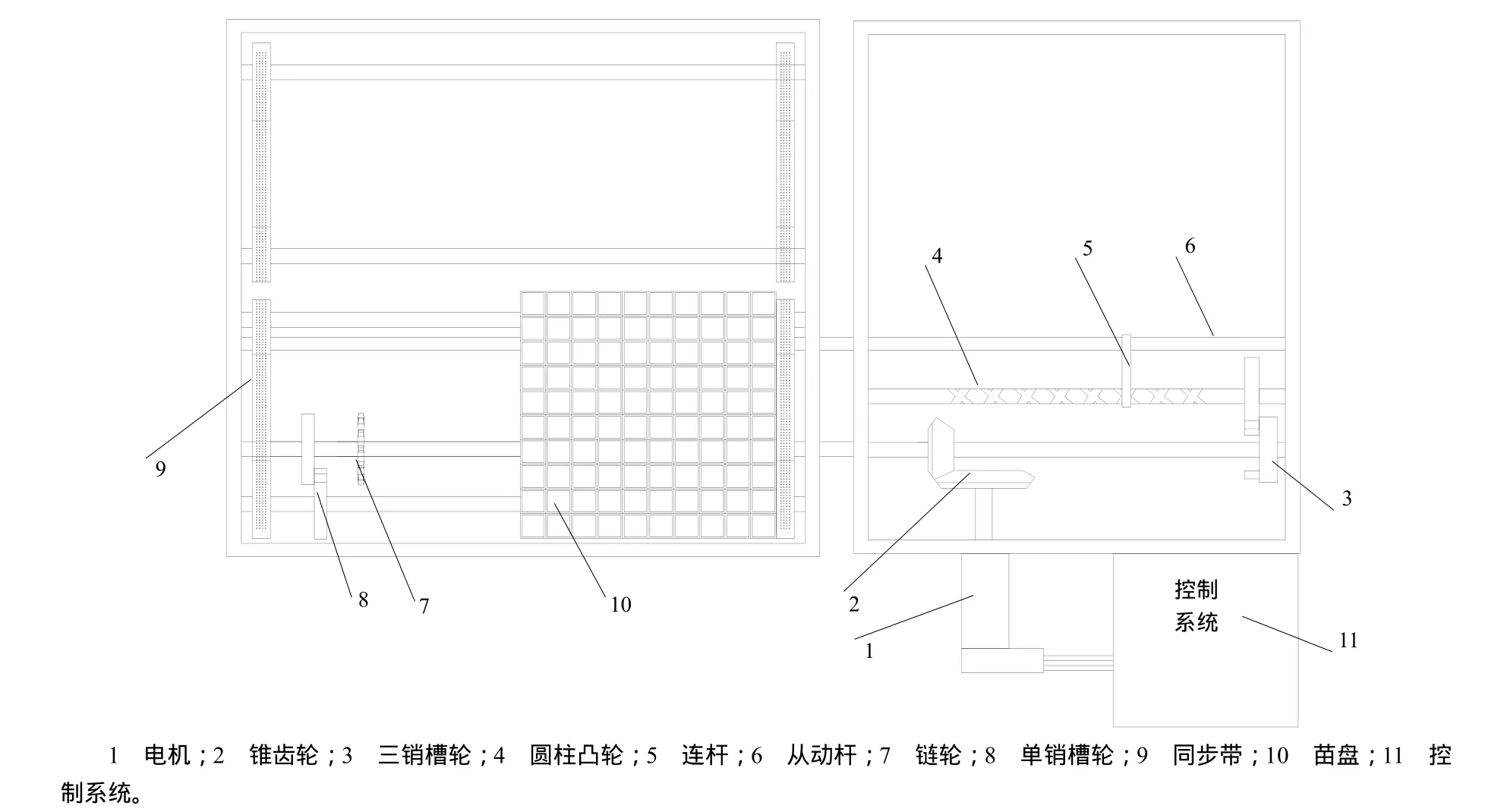
图1 送苗机构结构示意图Fig. 1 Send seedling mechanism structure diagram
选用湖南农业大学棉花科学研究所使用的 10孔×10孔规格苗盘作为试验苗盘,根据苗盘的大小和安装位置要求,设计长750 mm、宽750 mm、高440 mm的苗盘架,水平放置苗盘;根据苗盘的形状,送苗机构带动苗盘横向送完一行(10株330 mm)后,再纵向前进一格(间距33 mm),如此往复,移栽时棉苗苗盘呈“弓”字型运动轨迹。
1.2 横向送苗机构的设计
根据苗盘的运动轨迹,横向送苗机构需要完成往复直线间歇运动。采用槽轮机构完成间歇运动,圆柱凸轮机构完成循环往复直线运动,横向送苗机构如图2所示。
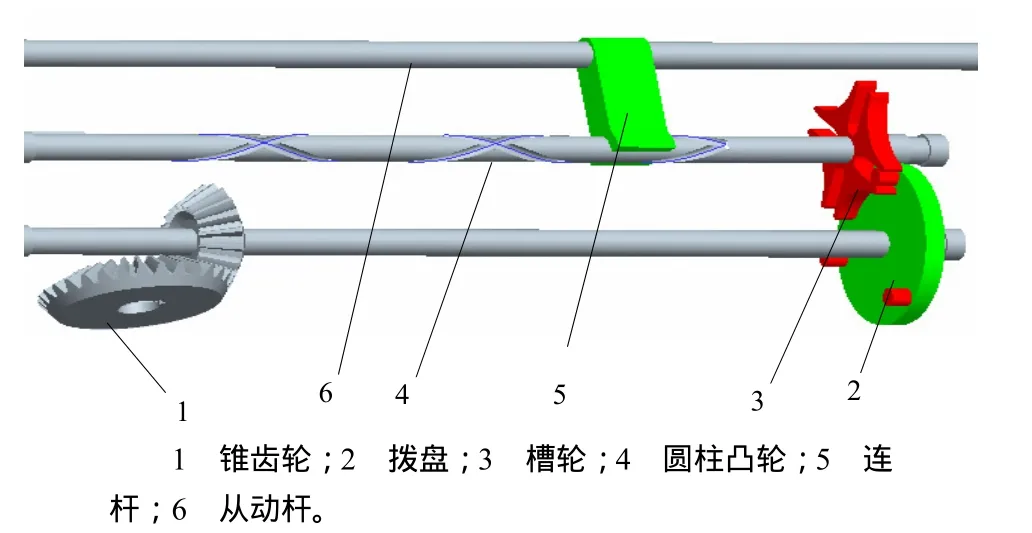
图2 横向送苗机构Fig. 2 Horizontal send seedlings institutions
为了减少冲击,槽轮机构选择槽数z =4的外槽轮,圆销数n∈[1,4][5]。当n取1和2时,效率较低;n为4时无间歇时间,且容易发生干涉。为满足机构工作要求,提高工作效率,n取 3。根据机构安装位置要求,取中心距a=60 mm,计算得圆销转动半径R=42.42 mm,销钉半径r1=7.7 mm,锁止弧半径r2=30.1 mm。
为了将槽轮机构的圆周间歇运动转换成往复直线间歇运动,圆柱凸轮采用循环往复螺旋曲线轮廓凹槽[10]。苗盘放在与从动杆固连的苗盘架上,圆柱凸轮。当槽轮机构作间歇转动时,由凸轮机构带动苗盘作往复直线间歇运动,完成横向送苗要求。
1.3 纵向送苗机构的设计
纵向送苗机构(图3)由槽轮机构、带传动机构和链传动机构组成。
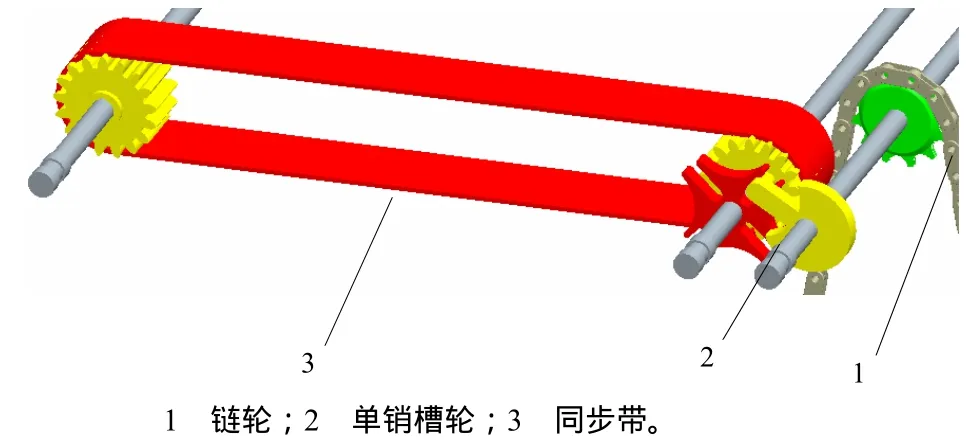
图3 纵向送苗机构Fig. 3 Longitudinal send seedlings institutions
选择槽数z=4的外槽轮,由于横向送苗1行(10株),纵向才送苗1株(间距33 mm),故圆销数n取1,中心距选取 35 mm。计算得:圆销转动半径R=24.74 mm,销钉半径r1=4.12 mm,锁止弧半径r2=18.15 mm。
为了防止皮带打滑,保证传动精度,采用同步带传动,并在带上增加一定数量和间距的凸缘。通过计算,取同步带轮分度圆半径R=21 mm。根据需要链传动机构选用08A节距为12.7 mm的滚子链。当横向送苗1行后,同步带上的凸缘嵌入苗盘底部的凹槽中,带动苗盘纵向移动1格,完成纵向送苗。
2 送苗机构检测控制系统的设计
系统采用Atmega-16作为主控芯片,Maxon牌RE-35直流伺服电机和 MLDS3610型直流伺服驱动器作为动力驱动系统。
检测系统包括空苗信号检测和移栽机前进速度检测。为使移栽机速度与送苗机构速度匹配,采用光电传感器对移栽机速度进行检测,获得移栽机速度信号。机构输送时,行程开关固定不动,棉苗随着苗盘一起运动,棉苗茎秆触碰行程开关产生电信号,若有苗,则输出高电平“1”;若空苗,输出低电平“0”,完成对棉苗空苗与否的检测。
控制系统启动后,将移栽速度信号与空苗信号同时输入主控芯片进行运算,得到有苗和空苗时的电机转速信号,伺服驱动器对信号进行处理,驱动电机按照计算出的转速转动,电机带动送苗机构输送苗盘,保证空苗时能够加速运动,让空苗孔快速通过取苗口,取苗机构的机械手能够正常取苗,避免棉苗漏栽现象。
3 送苗机构仿真分析
移栽时,移栽机前进速度取0.4 m/s,移栽棉苗株距 440 mm,移栽机移栽 1株棉苗的间隔时间t1=1.6 s[14]。为保证移栽机前进速度与送苗机构速度相互匹配,电机转速取9 r/min,选取1个送苗周期(横向→纵向→反向横向→纵向),送苗机构移动行程726 mm。
利用Pro/E三维软件对送苗机构进行三维建模和运动学仿真分析[12-13],得到送苗机构横向和纵向位移与时间的关系(图4、图5)。
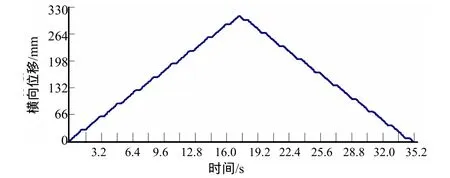
图4 横向位移与时间的关系Fig.4 Displancement projection on transverse

图5 纵向位移与时间的关系Fig.5 Displacement projection on longitudinal
由图4可知,在1个周期内,横向位移逐渐增加,且具有间歇段,每段增加33 mm(送苗1株),所需时间1.6 s;约17.6 s后,位移开始逐渐减小,每段减小量为33 mm,所需时间仍为1.6 s。可保证送苗机构输送棉苗间隔时间和移栽机移栽棉苗间隔时间相等。
图5表明送苗机构运动的周期性变化,0~16 s时,位移不变,表示送苗机构正在横向运动,纵向不运动;16~17.6 s时,纵向位移急剧下降,且减少的量为固定值33 mm,表示送苗机构纵向前进1格。结合送苗机构横向和纵向的运动轨迹,可以得出结论:所设计的机构横向作循环间歇往复运动,纵向作间歇运动。整个苗盘的运行轨迹呈“弓”字型,满足所需的轨迹要求。
4 结 论
a.设计了一种棉花裸苗移栽机自动送苗机构,并对机构进行了虚拟仿真分析。结果表明:所设计的机构能够实现棉花苗盘横向送苗和纵向送苗自动化,自动送苗间隔时间(1.6 s)和移栽机移栽棉苗的间隔时间(1.6 s)一致;苗盘的运行轨迹呈“弓”型,满足所需的轨迹要求。
b.为自动送苗机构添加苗盘空穴检测和机构控制系统,系统用ATMega16单片机作为主控芯片,对系统进行模拟试验。结果表明:当检测系统检测到苗盘空穴时,控制系统能控制送苗机构加速移动,使下1株棉苗迅速到达取苗口,可避免棉苗移栽时的漏苗现象。
[1]熊耐新,全腊珍,邹运梅,等.我国棉花移栽机的现状与发展趋势[J].湖南农机,2010,37(1):1-3.
[2]陈金湘.棉花水浮育苗技术[J].中国棉花,2006,33(11):24-25.
[3]吴碧波.不同漂浮方式育苗对棉苗素质及成苗的影响[J].作物研究,2009(2):120-122.
[4]韩迎春,毛树春,李亚兵,等.裸苗移栽棉花产量、品质和效益分析[J].中国棉花,2009,36(3):9-14.
[5]孙恒,陈作模,葛文杰.机械原理[M].7版.北京:高等教育出版社,2005:240-243.
[6]范云翔.温室全自动移栽机的研究开发[J].农业工程学报,1996,12(2):111-115.
[7]田素博,王荣华,邱立春.温室穴盘苗自动移栽输送系统设计[J].沈阳农业大学学报,2009,40(4):620-622.
[8]周婷,汪小虽,王超群,等.温室穴盘苗移栽机的设计与仿真分析[J].机械设计与研究,2009,25(2):121-124.
[9]刘辰.外槽轮机构设计分析[J].机电工程技术,2009,38(2):61-66.
[10]范晓珂.螺旋廓线圆柱凸轮机构的设计与应用[J].煤矿机械,2006,27(7):8-10.
[11]金宁宁.基于AVR单片机输入捕捉功能的频率计设计[J].计算机技术与应用,2010,30(3):38-40.
[12]李雷.Pro/E产品装配与机构仿真[M].北京:化学工业出版社,2009:20-30.
[13]林清安.Pro/ENGINEER野火3.0中文版动态机构设计与仿真[M].北京:电子工业出版社,2007:30-60.
[14]熊耐新.棉花裸苗移栽机构设计与试验研究[D].长沙:湖南农业大学工学院,2011:50-58.