基于Creator/Vega成像仿真在雷达系统中的研究*
2012-06-07糜小兵
朱 峰 糜小兵
(中国电子科技集团公司第二十八研究所 南京 210007)
1 引言
在雷达系统仿真与评估的研究中,雷达系统视景的成像仿真则是其中一项重要技术[1]。该技术是基于虚拟现实技术开发的,在雷达系统越发复杂、设备成本越发高昂的今天,采用虚拟现实技术对雷达系统进行测试、训练与研究,不但可以全面提高效率,也可以有效降低成本。实际上,实时、高逼真的成像仿真无论是军用还是民用方面,都有广泛的需求和巨大的应用前景。
由于雷达系统的视景模型有其自身特点,构建的模型涵盖地形,地貌,人文景观,覆盖的地理区域范围相当巨大,这样导致模型生成的多边形数量巨大,往往在百万数量级,这对硬件提出很高的要求,同时也出现真实性与实时性的矛盾。
Multigen-Paradim公司的Creator与Vega软件是目前在仿真成像领域应用较广泛的商用软件。本文利用了Creator构建防真所需模型以及Vega加载其模型的数据文件,并利用其LOD技术、Billbaords技术,以及RadarWorks模块有效地化解了真实性与实时性的矛盾,并在PC图形工作站上很好地完成了基于SAR模式的视景成像仿真。
2 大面积地形场景模型的构建
地面仿真场景由大面积地形模型以及地面文化特征模型构成,随着仿真应用的向前发展,对地形逼真度与仿真实时性的要求也越来越高,但是,计算机的性能是不可能无限提高的。本文使用Creator3.0来构建模型,通过其独创的用于描述三维虚拟场景的层次化数据结构—OpenFlight,以及节点式分层结构,在保证地形真实性的基础上,有效地提高了仿真实时性。
2.1 地形建模流程
对于一定的地形范围来说,建立好一个组织有序、效率很高的地形数据库是一个需要反复测试的过程。在创建大面积的地形场景之前,我们可以先提取小部分原始DED(Digital Elevation Data)创建一个用来测试的数据样本,待测试得到较好的效果后,再建立整个地形模型数据库,其具体流程如图1所示。

图1 地形建模流程图
·规划数据库:在确定仿真目标下,确定硬件和软件相关平台是否满足要求。
·准备地形数据:获取地形数据库所需数据,将其处理为Creator能够识别的数据。
·创建测试地形:利用小部分DED创建一个测试地形数据库,并进行有针对性的测试。
·完善地形模型:选择合适的纹理映射方式对地形模型进行纹理映射,并添加地物模型。
·检验与优化:在实时仿真系统中运行,检验其性能,包括每个细节层次,确保相邻的LOD之间可以平滑过渡。
·添加地形模型:在仿真系统资源允许的条件下,向地形模型数据库添加地物模型来达到丰富的视觉效果。
2.2 细节层次LOD(Level Of Detail)技术
LOD技术的基本思想是:用具有多层次结构的物体集合描述场景,即场景中的物体具有多个模型,其模型间的区别在于细节的描述程度;在实时显示时,用细节较简单的物体模型适时地替代细节较复杂的模型,就可以减少场景的几何复杂性,提高显示速度[2]。
针对雷达场景的实际情况,在系统可以使用三个层次模型,即通过Creator的Insert LOD工具插入三个LOD开关距离,分别为1000、5000和10000m。为了消除层次转换所带来的跳变现象,层次转换时必须有一个过渡转换距离,这一点可以通过重叠相邻LOD层次的小部分距离范围实现。另外,Creator中的Morphing工具对物体顶点提供了路径渐近变换功能,可以实现距离切换的平滑过渡[3]。
2.3 实例化技术
实例化(Instances)技术不同于复制技术,虽然也是实现模型的复制过程,但该技术所产生的模型并不占用内存资源,只是在内部引用被实例化模型。对原始模型所做的任何改动都将会影响其它所有实例化模型。实例技术通常与坐标转移技术结合使用,Creator中的Create Instance工具和ManeuverTools工具分别用来生成和操作实例化模型。
在系统所有功能完成后,进行测试保证基本功能全部实现。其主要测试系统功能是否错误或者是否有遗漏、是否有数据结构或外部数据库访问错误、性能是否能够接受等。本研究对开发的系统采取了黑盒测试。测试显示社区门诊服务系统三个流程基本都能实现。本社区门诊系统中病人不需要做任何操作,非常方便,挂号员医生和收费员得操作也不是特别复杂,只需要选者相应的数据即可。操作简单,功能齐全,对帮助人们在社区就诊系统的效率提升和看病体验有积极作用。
2.4 Billboards(公告牌)技术
Creator中的Billboards是指模型数据库中那些可以在实时仿真过程中始终保持面对视点的多边形。公告牌技术通常用来构建场景中的树木,路灯等模型,或者场景中其它类似的具有对称性的物体,甚至可以用于一个多边形来表现具有大量细节的模型对象[4]。
2.5 大场景的纹理映射技术
纹理映射技术极大的增强了模型的真实感。纹理图案包含的信息量往往需要数量庞大的多边形来实现,而多边形的数量又是影响系统实时性的关键因素。视景系统中对大面积地形模型使用纹理映射保证了真实性和实时性[5]。
Mipmap是目前应用最广的纹理映射技术之一,是纹理裁减所基于的关键概念。Mipmap技术是将原始纹理图像表达为具有不同分辨率的纹理数据,形成一个逐渐减少分辨率的图像金字塔,也就是纹理的LOD,具有低分辨率的图像每边为高一级分辨率图像每边的1/2[6]。
3 Vega中SAR成像仿真
3.1 SAR成像研究
雷达成像的最基本目的是对目标的显示、分类与识别。常见的光学成像是利用目标对阳光的反射成像,然而雷达是主动向目标发射电磁波,利用接收到的目标的反射回波成像。由于雷达成像的主动性,不受光照等影响,因此具有全天时成像的特点,又因为微波具有强透射性,无论云、雾或雨都对微波无严重影响,所以雷达成像具有全天候的特点[7],在军事方面获得了广泛的应用,民用方面也具有广阔的市场。SAR是一种获得高分辨率图像的雷达模式,它利用脉冲压缩技术获得良好的距离分辨率,利用合成孔径原理获得很高的方位向分辨率,从而获得大面积高分辨率雷达图像,SAR集中体现了雷达技术的进步[8]。
3.2 Vega中RadarWorks模块
Vega中提供了用于模拟雷达成像的RadarWorks模块,它是基于在建模过程中,给模型贴上不同的材质属性,这些材质属性都对应一个统计的RCS值,其RadarWorks模块根据模型的RCS值模拟出雷达成像结果。
3.3 RCS的获取
在Vega中可以根据目标模型的真实物理材质属性,快速生成灰度化的RCS图像的整套机制。
因为Vega中产生的RCS图像是基于真实物理材质属性的,因此可以模拟出较高的真实度的雷达图像。在Vega软件的数据库中,提供了150多种材质的RCS数据库,在材质数据库中,不同的工作频段,不同的极化方试,不同的入射角都对应不同RCS值。可以通过Vega自带的工具Spabba来查看其每种材质的RCS数据库,并且可以对其修改和扩展[9]。
2)材质映射
利用Vega系统自带的工具TMM(Texture Material Mapper),可以对模型中每一个纹理图片中的texel赋予不同的材质。比如,在一块模型场景中,对其中的一些绿色场景赋予草地材质,一些绿色赋予树木,在雷达成像模拟过程中,场景的材质属性将取代纹理属性,这样生成的雷达图像就比较真实[10]。
3)RCS数据库获取流程

图2 RCS数据库获取流程
3.4 RadarWorks参数设置
RadarWorks模块支持的雷达类型包括:RBGM(Real Beam Ground Mapping),DBS(Doppler Beam Shorpening),SAR;可以模拟VV,VH,HV,HH四种极化方式;支持的雷达工作频率范围在1GHz~27GHz;可以根据PRF(Pulse Repetitions Frequency)等参数计算成像分辨率,可以对地形和人文要素的雷达RCS进行实时计算。
通过设置合理的雷达工作参数,就可以仿真出较为真实的SAR雷达图像。可对SAR成像仿真产生主要影响的参数有:雷达平台于仿真目标间的距离,工作频率,飞行速度等。
下面将给出工作频段和极化参数在不同设置情况下的SAR成像仿真。
1)不同工作频段的成像仿真:

图3 L波段成像图
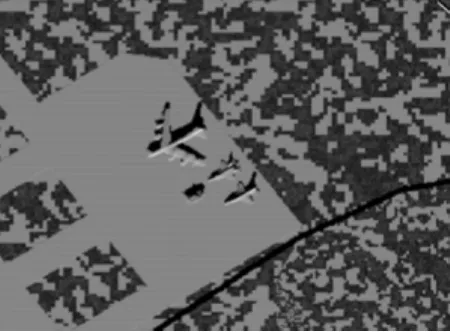
图4 X波段成像图
2)不同极化方式的成像仿真:

图5 HH极化成像图

图6 VV极化成像图
下面给出RadarWorks在实际中运用的效果图,其中参数是以C工作频段,VV极化方式,10°入射角,SAR平台与场景中心距离为5000m,对城市场景的防真图:

图7 城市场景图
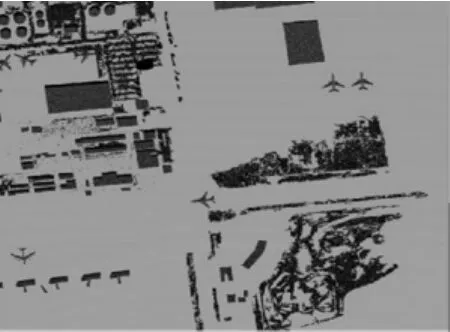
图8 城市场景的RCS图
4 结语
本文研究了基于Creator建模的相关技术和流程,把构建的模型导入Vega中,然后通过Vega中的RadarWorks模块来模拟雷达成像仿真,通过设置合理的参数,能够较好的仿真出真实的雷达图像。该方法能够方便有效地修改参数,并且在修改之后能够很快看到修改后的结果,因此在雷达系统测试、评估等方面都有良好的辅助作用。
[1]翟尚礼,王胜文.对空雷达终端发展及其关键技术[J].指挥信息系统与技术,2011,6(3):78-80.
[2]唐婕,龚光红.大面积真实地形场景库的生成与实时显示技术[J].系统仿真学报,2006,8(18):461-464.
[3]孙家广等.计算机图形学[M].第三版.北京:清华大学出版社,1998:270-272.
[4]王乘,李利军等.Creator可视化仿真建模技术[M].武汉:华中科技大学出版社,2005:93-95.
[5]吴晓君,王昌金.基于Creator/Vega的战场飞行视景系统的实时仿真[J].系统仿真学报,2005,2(9):254-257.
[6]Alfred J Menezes,Paul C van Orschot,Scott A Vanstore.应用密码学手册[M].北京:电子工业出版社,2004:434-435.
[7]刘永坦.雷达成像技术[M].哈尔滨:哈尔滨工业大学出版社,1999:73-74.
[8]George.W.Stimson.机载雷达导论[M].北京:电子工业出版社,2005:138-139.
[9]Merrill I,Skolnik.雷达手册[M].北京:电子工业出版社,2003:12-14.
[10]龚卓蓉.Vega程序设计[M].北京:国防工业出版社,2002:51-58.