基于滑模观测器的感应电机无速度传感器直接转矩控制
2012-06-04孙振兴张兴华
孙振兴,张兴华
(南京工业大学自动化与电气工程学院,江苏 南京 210009)
基于滑模观测器的感应电机无速度传感器直接转矩控制
孙振兴,张兴华
(南京工业大学自动化与电气工程学院,江苏 南京 210009)
提出了一种定子磁链滑模观测器,该观测器以定子电流和磁链作为状态变量,利用电流观测误差对定子磁链观测值进行校正,采用李雅普诺夫理论证明了观测器是渐近收敛的。设计了基于定子磁链滑模观测器的感应电机无速度传感器的直接转矩控制系统,将磁链估计值用于对转速进行实时估计。实验结果表明,采用滑模观测器的感应电机无速度传感器直接转矩控制系统,具有转矩动态响应快,转速控制精度高和调速范围宽的特点。
感应电机;直接转矩控制;滑模观测器;无速度传感器
1 引言
定子磁链的准确估计是感应电机无速度传感器直接转矩控制获得高性能的关键。磁链相位的观测误差,可导致扇区的判断错误,产生较大的转矩脉动;而磁链幅值的观测误差,可导致电机的负载能力降低,影响动态响应或使电机处于磁饱和。由于感应电机在运行中存在着电机参数变化,信号检测误差和逆变器死区等非线性因素,影响磁链观测精度。因此要求定子磁链观测器具有强鲁棒性[1]。
目前,直接转矩控制系统中常用的定子磁链观测器是电压积分磁链观测器(电压模型)。其实现简单,观测值仅与定子电阻有关,对电机转子参数依赖小。但电压模型中的纯积分环节会产生直流偏置误差和初始积分误差,通过积分器累积后,会使观测值发散。为了克服电压模型存在困难,国内外学者提出了多种改进方法,如用低通滤波器代替纯积分器[2],对死区时间进行补偿[3-4],采用定子电阻在线观测[5-7]等方法。这些方法在一定程度上提高了磁链观测器的性能,然而这些观测器的基本结构与电压模型类似,采用的是一种开环结构,因此易受电机参数变化及采样误差的影响,系统鲁棒性差,在电机低速运行和外界干扰较大的情况下,实际的运行状态并不理想。为进一步提高磁链观测器的性能,人们提出了一些具有闭环结构的磁链观测器。文献[8]提出了一种扩展卡尔曼滤波磁链观测器;文献[9]提出了一种自适应磁链观测器。这些观测器很大程度上克服了开环观测器存在的问题,但这些闭环观测器的设计与实现都比较复杂。如自适应观测器中反馈矩阵增益系数对观测器的收敛速度影响很大,且与电机运行状态有关,其值的选择主要依赖经验,在电机不断变化的工况状态下,不易获得最优值。扩展的卡尔曼滤波器算法的计算量很大,其实现需采用计算能力强的高性能 DSP,实时性较差。此外这种方法易受电机参数变化的影响,低速时的观测性能也不理想。
滑模变结构控制与常规控制方法的根本区别在于控制的不连续性,即一种使系统“结构”随时变化的开关特性,使系统在一定条件下沿规定状态轨迹做小幅度、高频率的上下运动。这种滑动模态是可以设计的,且与系统的参数与扰动无关。从而使系统具有很好的鲁棒性[10]。本文将滑模控制理论用于磁链观测器的设计提出了一种新型定子磁链滑模观测器,该观测器结构简单,易于实现。将其用于感应电机的无速度传感器直接转矩控制系统,提高了磁链和转速的鲁棒性和观测精度,有效地减小了转矩脉动,扩展了调速范围,提高了调速性能。
2 定子磁链滑模观测器
在忽略电动机铁心磁饱和,不计涡流和磁滞损耗,三相绕组对称、均匀,绕组中感应电势波形为正弦波的条件下,在两相静止α-β坐标系中,以定子电流和定子磁链为状态变量的感应电机方程为:


根据式(1)构建定子电流和磁链滑模观测器:


用式(1)中电流方程减去式(2)得:

其中

定义如下形式的李雅普诺夫函数:

用式(1)磁链方程减式(3)得磁链观测误差方程如下:


定义如下形式的李雅普诺夫函数:
2.2.3 慢性疾病 慢性疾病也是造成失眠患者焦虑、抑郁的重要因素,失眠患者长期受到高血压、糖尿病、脑梗死、冠心病等疾病的影响,导致失眠不断加重,进而形成恶性循环,使其心理也受到严重影响。刘春萍等[15]对612例患者进行研究,其中慢性病组385例,非慢性病组227例,结果发现慢性病组患者发生失眠的比例高于非慢性病组,同时,合并焦虑、抑郁的比例也处于较高水平,临床中应积极重视慢性病患者的睡眠情况,尽早识别其焦虑、抑郁等情绪,必要时采取相应的干预措施,以改善患者预后。
当c1>0的情况下,c2>0即可保证<0,从而保证了定子磁链观测器收敛到实际值。定子磁链滑模观测器结构,如图1所示。
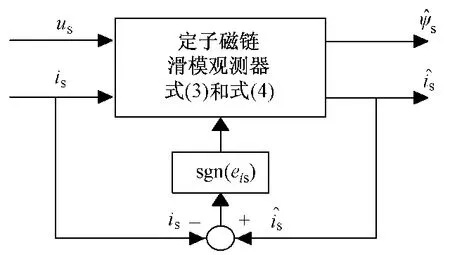
图1 定子磁链滑模观测器Fig.1 Sliding-mode stator flux observer
3 电机转速观测器
异步电动机中转子速度 ωr、同步转速 ωe及转子转差角频率ωs存在如下关系:

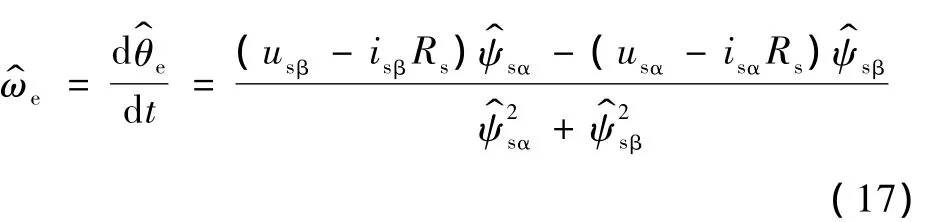
定子磁链与定子坐标系的夹角θe可以表示为:

同步转速ωe,可以得到:
转差角频率ωs可以表示为:

所以电机的转速为:

其中,ψr的计算公式为:


在实际应用中,逆变器输出电压及输出电流中含有噪声,当模拟量经过A/D转换器变为数字量时会附加上转换噪声,直接采用式(17)和式(18)来估计转子速度会导致速度估计的偏差。可以对转差速度项和转子磁链旋转速度项进行滤波来提高估算精度[11]。
4 系统实现
系统测试平台主要包括功率驱动电路,信号检测电路和控制电路。功率驱动电路由单相整流电路、大电容滤波电路、逆变电路及一些辅助电路组成。信号检测电路是由一个电压和两个电流传感器组成。以TMS320LF2812 DSP为控制芯片。算法采用C语言编程实现。
控制系统结构如图2所示。定子相电流和母线电压由霍尔传感器检测。ia,ib经3/2变换,得到静止两相坐标系(αβ坐标系)中的定子电流分量;由母线电压Vdc和当前开关状态,得到静止两相坐标系(αβ坐标系)中的定子电压分量。由观测器得到转矩、磁链、磁链角和电机的转速。将转矩与磁链误差作为滞环比较器的输入量,得到相应的开关状态变量。最后通过查表得到正确的电压开关信号来驱动逆变器提供合适的电压给感应电机,实现感应电机无速度传感器的变频调速。

图2 控制系统结构图Fig.2 Block diagram of control system
5 实验结果
实验中电机参数见表1。取 PWM采样周期Tpwm=100μs,速度采样周期 Tspeed=10Tpwm,给定转速=55rad/s、100rad/s 和 10rad/s,磁链给定值=0.9Wb,速度 PI调节 Kp1=0.1,Ki1=0.01,观测器增益 c1=1000,c2=10,转矩 PI调节器的输出3.5Nm。

表1 电机参数Tab.1 Parameter of induction machine
试验中采用TMS320F2812自带RS-232串行通讯来实现实验数据的传输。这种数据采集方式可以防止外加检测电路对系统运行的干扰。
图3~图5为基于滑模观测器的感应电机无速度传感器直接转矩控制实验结果。图3(a)为设定转速给定为55rad/s时,转速和转矩实验响应曲线,可见转速无超调,且稳态运行平稳、脉动小,转矩稳态下转矩脉动较小;图3(b)为定子磁链轨迹,近似于圆形,磁链跟踪控制性能优良。
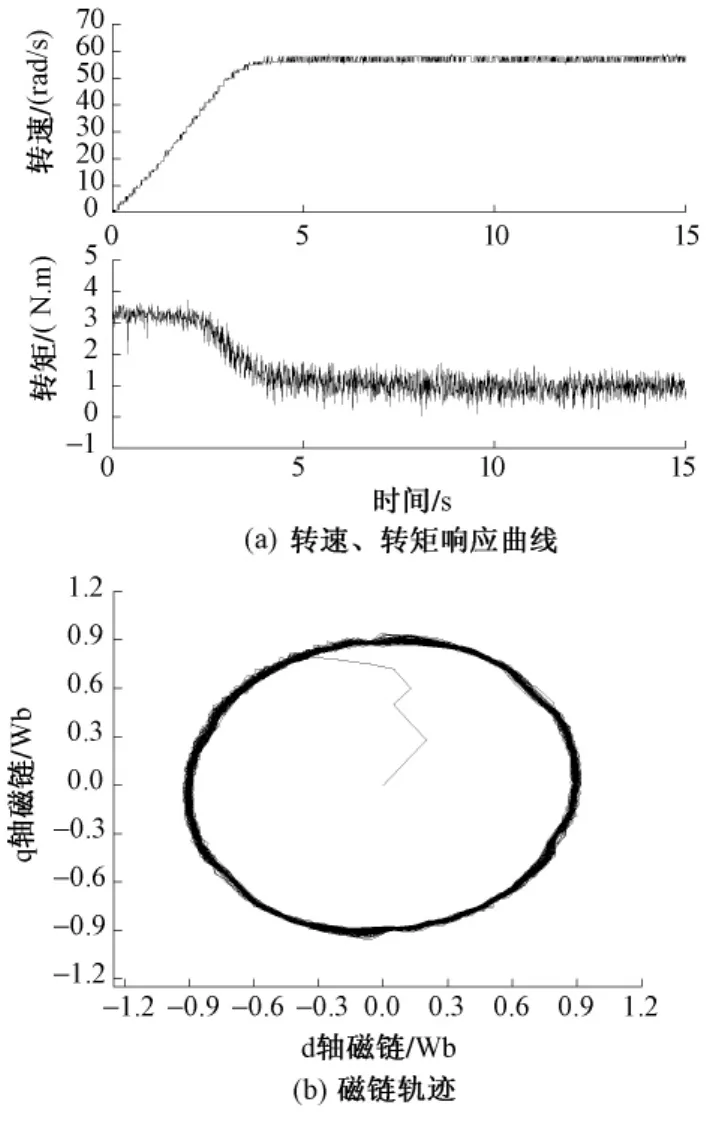
图3 转速,转矩和磁链Fig.3 Speed,torque and flux magnitude

图4 转速变化时磁链幅值Fig.4 Change of speed & flux amplitude
由图4可知在转速发生变化时对磁链的观测并无影响。说明该滑模磁链观测器具有较好的观测性能。
图5(a)为转速为100rad/s时实际转速与估计转速,从中可以看出,启动时估计存在一定误差,但稳态时估计速度能够准确地收敛到真实转速。图5(b)是转速为10rad/s时的实际转速与估计转速,从图中可以看出,滑模观测器低速时,仍具有很好的估计性能。
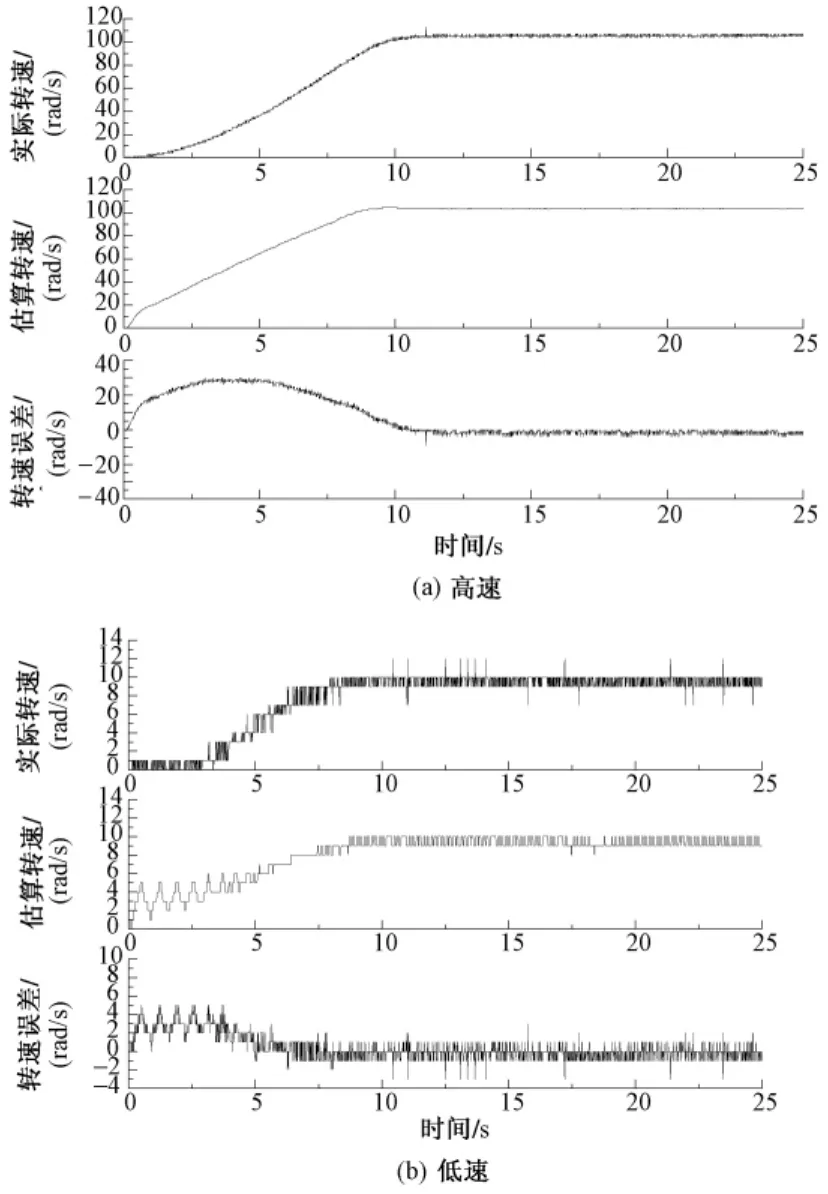
图5 高速与低速转速估计Fig.5 Estimated speed for high speed and low speed
6 结论
本文提出了一种新型的感应电机滑模磁链与转速观测器。该观测器结构简单,易于实现。可在较宽的调速范围实现对磁链和转速的渐近估计,有较强的鲁棒性。将设计的滑模观测器应用于感应电机的无速度传感器直接转矩控制,实现了感应电机无速度传感器的变频调速。理论分析和实验运行表明给出的控制方法,在高低速区域内均有着良好的转速跟踪能力,电机的转矩和磁链脉动较小,控制系统性能优良。
References):
[1]周扬忠,钟技 (Zhou Yangzhong,Zhong Ji).用于永磁同步电动机直接转矩控制系统的新型定子磁链滑模观测器(A novel stator flux linkage estimator eased on sliding mode theory for direct torque control of permanent magnet synchronous motor)[J].中国电机工程学报(Proceedings of the CSEE),2010,30(18):97-102.
[2]Hu Jun,Wu Bin.New integration algorithms for estimating motor fluxover a wide speed range power electronics[J].IEEE Transactions on Power Electronics,1998,13(5):969-977.
[3]毛鸿,吴兆麟 (Mao Hong,Wu Zhaolin).基于三相PWM整流器的无死区空间矢量调制策略 (The nondead-time space-vector-modulation strategy based on three-phase PWM rectifilers)[J].中国电机工程学报(Proceedings of the CSEE),2001,21(11):100-104.
[4]胡庆波,吕征宇 (Hu Qingbo,Lv Zhengyu).一种新颖的基于空间矢量PWM的死区补偿方法 (A novel method for dead-time compensation based on SVPWM)[J].中国电机工程学报 (Proceedings of the CSEE),2005,25(3):13-17.
[5]陈硕,山田英二 (Chen Shuo,Tsuji Mineo).感应电机无速度传感器矢量控制系统的定子电阻在线辨识(On-line identification of stator resistance for sensorless vector control system of induction motors)[J].中国电机工程学报 (Proceedings of the CSEE),2003,23(2):88-92.
[6]吕伟杰,刘鲁源 (Lv Weijie,Liu Luyuan).小波网络在直接转矩控制定子电阻辨识中的应用 (Stator resistor identification of induction motor in DTC system with wavelet network)[J].中国电机工程学报 (Proceedings of the CSEE),2004,24(4):116-119.
[7]Nahid M B,Meibody T F,Sargos F M.Mechanical sensorless control of PMSM with on line estimation of stator resistance[J].IEEE Transations on Industry Applications,2004,40(2):457-471.
[8]陈振,刘向东,靳永强,等 (Chen Zhen,Liu Xiangdong,Jin Yongqiang,et al.).采用扩展卡尔曼滤波磁链观测器的永磁同步电机直接转矩控制(Direct torque control of permanent magnet synchronous motors based on extended Kalman filter observer of flux linkage)[J].中国电机工程学报 (Proceedings of the CSEE),2008,28(33):75-81.
[9]冯江华,许峻峰 (Feng Jianghua,Xu Junfeng).基于定子磁链自适应观测的永磁同步电机直接转矩控制系统(Permanent magnet synchronous machines direct torque control system based on adaptive stator flux observer)[J].中国电机工程学报 (Proceedings of the CSEE),2006,26(12):122-127.
[10]Utkin V I.Sliding modes and their application in variable structure systems[M].Moseow:MIR,1978.
[11]祝龙记,王汝琳 (Zhu Longji,Wang Rulin).基于直接转矩控制的高性能磁链观测与速度观测 (High performance flux observer and speed observer of direct torque control)[J].电机与控制学报 (Electric Machines and Control),2004,8(3):209-214.
Speed sensor-less direct torque control of induction motors based on sliding-mode observer
SUN Zhen-xing,ZHANG Xing-hua
(College of Automation& Electrical Engineering,Nanjing University of Technology,Nanjing 210009,China)
In this paper,a novel sliding-mode observer for stator flux estimation is proposed.This observer employs stator currents and flux as the state variables,and uses the error of the stator current estimation to adjust the flux observer.The convergence of the observer is proved by Lyapunov's stability theory.Then,a speed sensor-less direct torque control system of induction motor drives based on the sliding-mode flux observer is designed,which uses the slip frequency method to calculate the speed on real time.The experimental results show that the proposed the control scheme possesses the features of fast torque response,accurate speed tracking and wide range of speed.
induction motor;direct torque control;sliding-mode observer;speed sensor-less
TM346
A
1003-3076(2012)04-0029-05
2011-08-28
孙振兴 (1984-),男,江苏籍,硕士研究生,研究方向为交流电机驱动控制;
张兴华 (1963-),男,广东籍,教授,博士,研究方向为电力传动控制、复杂系统控制。
