高速铁路轨道精调作业技术
2012-05-14武孟尝
武孟尝
(中铁电气化局西安铁路工程公司,陕西西安 710032)
1 概述
高平顺性的轨道工程施工技术是高速铁路的核心技术之一,高平顺性轨道也是列车高速安全行驶,提高旅客乘坐舒适度的必要条件[1-2]。高速铁路土建工程完成后,底座板、轨道板、长轨铺设等施工环节均进行了严格的精度控制,确保按照轨道的设计线位施工。由于施工环境的复杂及累计误差效应等因素的影响,长轨铺设后的轨道平顺性仍不理想,需要对轨道进行精细调整以确保轨道平顺。因此,轨道精调是建设高平顺性轨道的最后环节,使轨道满足高速行车要求的重要保障,具有不可替代的重要性。基于某客运专线轨道精调的实践经验,全面系统地总结了高速铁路轨道精调作业技术。
2 轨道静态调整标准
轨道精调是根据轨道检测数据分析轨道的平顺性状态,提出精确到每个扣件位置的轨道调整量表,进而指导外业实施轨道调整的渐进过程,每经过一次调整,轨道的平顺性状态就会得到进一步改善,直到满足要求。在这个过程中,数据分析及轨道调整所遵循的标准是核心,所有的工作都围绕这个核心开展。《高速铁路工程测量规范》对轨道应该达到的各项平顺性指标有明确要求,但在实际工作当中,为了确保轨道精调工作被认真贯彻落实,为了确保竣工轨道的平顺性质量,通常会提出一个要求更高的作业标准,而将规范标准作为验收标准。基于目前先进的测量手段,作业标准虽然更高,但仍可以达到,某客运专线轨道精调的作业标准及验收标准如表1所示。
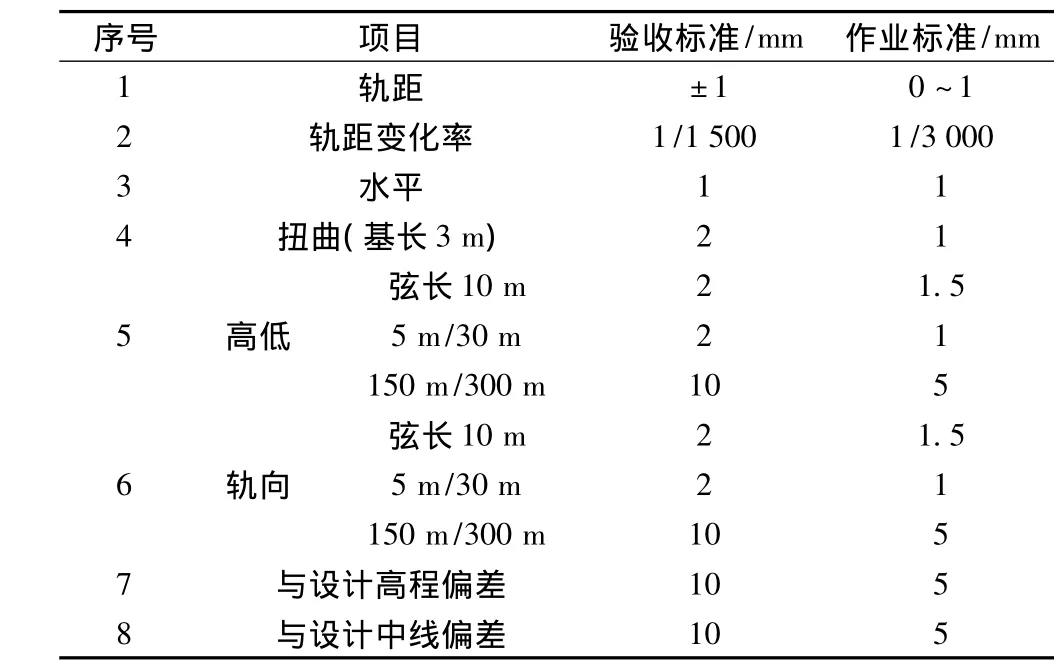
表1 某客运专线轨道精调的作业标准及验收标准
3 CPⅢ控制网复测
CPⅢ控制网直接为高速铁路上部构造施工服务,是建设高平顺性轨道的关键。轨道精调之前,CPⅢ控制网已用于底座板、轨道板施工控制及轨道基准网施测,受环境、施工等因素影响,可能存在点位破坏、位移等情况,为了保证轨道检测数据的高精度及连贯性,必须对CPⅢ控制网进行复测。CPⅢ控制网复测有如下几个要点:
(1)对复测区段内的CPⅠ、CPⅡ进行全面检查,已破坏或由于施工原因而不通视的点要重新恢复或加密;对已破坏的CPⅢ控制点要重新布设。
(2)CPⅢ控制网复测时各作业小组成员应密切配合,使测量、倒换棱镜等各个环节衔接流畅,如此方能提高作业效率,并尽可能缩短测量时间,从而使得作业时的外界环境趋于一致。
(3)复测成果各项精度指标均满足规范要求时,应进行复测成果的稳定性分析。复测成果与原测成果的坐标较差及坐标增量较差满足规范要求时,采用原测成果;不满足规范要求时,应采用复测成果。
4 轨道静态检测
4.1 轨道检查
无缝钢轨铺设完成,应力放散、锁定后即可开展轨道精调作业。在应用轨检小车采集数据之前,应先对轨道进行检查,重点检查钢轨、扣件、垫板、焊缝等,确保后续轨道检测数据不受这些因素的影响,能够真实反映轨道的几何状态。
(1)钢轨:全面查看,无污染、无低塌、无掉块、无硬弯等缺陷。
(2)扣件:安装正确,无缺少、无损坏、无污染,扭力矩达到设计标准,弹条中部前端下颏与轨距块间隙≤0.5 mm,轨底外侧边缘与轨距块间隙≤0.5 mm,轨枕挡肩与轨距块间隙≤0.3 mm。全面查看,重点抽查,每公里连续抽查100套。
(3)垫板:安装正确,无缺少、无损坏、无偏斜、无污染、无空吊(间隙≤0.3 mm)。全面查看,重点抽查,每公里连续抽查100处。
(4)焊缝:全部检查,主要测量焊缝平顺性,顶面0~+0.2 mm,工作边0~-0.2 mm,圆弧面0~-0.2 mm。
(5)道床板:清理干净扣件内部、承轨槽内混凝土残留杂质及灰尘。
4.2 设备检查
轨道几何状态数据采集属于精密作业,所采用的数据采集设备一定要处于良好状态,因此在正式进行轨道数据采集前,应对测量设备进行检查,主要包括全站仪、棱镜、棱镜杆及轨检小车。
(1)全站仪检校
在稳定的区域做全站仪补偿器检校,正倒镜相差15″以内,认为检校合格,否则继续校准;每隔一段时间,应对全站仪进行一次组合校准。
(2)棱镜杆检查
棱镜杆是否合格,将直接影响到全站仪自由设站的精度,进而影响轨检小车采集的轨道数据精度。通过互换测量,即保持棱镜不变而更换棱镜杆的方式,将吻合度好的棱镜杆每8根一组分配,留待后用。
(3)棱镜检查
棱镜是否有松动、破损等情况,也将直接影响到全站仪自由设站精度及轨检小车的测量精度,因此应进行检查。通过互换测量,即保持棱镜杆不变而更换棱镜的方式,将吻合度好的棱镜每8个一组分配,留待后用。
(4)轨检小车检查
轨检小车是轨道检测的核心装备,必须进行检查。首先检查能否工作,各个传感器是否正常;其次检查轨检小车的走行轮是否清洁,清除其上的污物、小颗粒物等,以免影响轨检小车的超高测量精度;然后还需检查轨检小车的重复性测量精度及一致性测量精度,轨距及超高的重复性测量精度应在0.2 mm以内,轨距及超高与零级轨距尺的一致性应在0.3 mm以内,同时平面位置及高程的重复性也应检测。另一方面,不同小车之间也应进行数据比对,轨距及超高应用一致性测量精度进行检核,平面位置及高程不强求一致,但差值应呈现系统性而不是随机偏差。如轨检小车检测不合格,应重新进行小车参数标定。
4.3 轨道静态数据采集
轨道静态数据采集是轨道精调的关键步骤,采集数据将直接用于指导后续的钢轨精调。轨检小车数据采集的作业流程如图1所示。
首先由智能型全站仪自动观测8个CPⅢ控制点,根据后方交会测量的数据解算得到全站仪的站心三维坐标并对全站仪定向;然后使用智能型全站仪的棱镜锁定功能,使其锁定在轨检小车的棱镜上;每当轨检小车停留在数据采集位置,即由远程控制终端控制全站仪测量目标棱镜并将测量数据通过无线数据链路发送到控制终端,由此完成对该点的数据采集。为了更好地完成轨道数据采集工作,应注意如下事项:
(1)轨枕编号。这是能够精确到每个扣件进行轨道调整的前提,因此应该做好轨枕编号工作。
(2)作业过程中,棱镜置放到位,确保棱镜与棱镜杆、棱镜杆与CPⅢ孔位插入牢固。
(3)全站仪自由设站的位置应靠近轨道中线,每次联测4对CPⅢ控制点,并且测站位于联测的CPⅢ控制点中间,每个测站的距离不应大于70 m,最短测量距离不应小于5 m。自由设站的精度要求满足表2[3],极端情况下也不应大于 1 mm。

图1 轨检小车作业示意

表2 全站仪自由设站精度
(4)轨道几何数据采集过程中,保证轨检小车匀速推进,待小车停稳后才可采集数据,严禁猛推猛停。作业过程中,轨检小车操作员负责测量数据的质量回检,对于两个连续测量点,轨距、超高变化大于0.5 mm处,须及时复测,确保数据准确、可靠。同时,记录每测站起终止板号、测量环境及测量过程(尤其是测量异常情况)形成作业记要,并在作业完成后与采集数据一同交予数据分析人员。
(5)相邻测站应有一定的重叠测量区域,一般不少于一块轨道板的距离(10 m),重叠测量的平面与高程精度应小于2 mm,轨距及超高的精度按重复性测量精度执行。相邻精调作业区间之间应至少重叠测量一站。
(6)测量道岔直股时应向两端各延长至少150 m的正线长度,以保证道岔直股与正线的平顺性连接。
5 轨道平顺性分析
轨道数据采集完成后,即可按照作业标准,在内业进行数据分析并得出轨道调整量,数据分析及调整如图2所示。

图2 轨道平顺性分析及调整示意
轨道平顺性分析及调整是技术性很强的工作,不同的技术人员所提出的模拟轨道调整量表会有较大的差异,而模拟轨道调整量直接关系到外业轨道调整的工作量、材料用量、工期等,也直接关系到轨道精调的作业成本,应引起足够的重视,加强对技术人员的培训,在满足规范要求的前提下,使得轨道调整量最小。轨道平顺性分析及模拟调整的技术要点如下:
(1)轨检小车作业完成并上交数据与作业记要时,数据分析人员须及时询问当天的作业情况,掌握数据采集的现场信息。在数据调整前,作业员须核查当天作业设站及搭接精度、有无遗漏测量点等情况,保证参与方案分析的轨道集合数据真实、可靠。对于质量未达要求的区段,及时安排复测工作。
(2)模拟调整应坚持“先整体、后局部”,“先轨向、后轨距;先高低、后水平”的基本原则。
“先整体、后局部”:主要是针对长波不平顺区段,根据采集数据的整体趋势图生成的波形,大致标出期望的线路走向和起伏状态,再分析局部线形,以“削峰填谷”的方式细化调整方案,确定轨道调整量,如图3所示。
“先轨向、后轨距;先高低、后水平”:先调整基准轨轨向,后调整非基准轨以控制轨距;先调整基准轨高低,后调整非基准轨以控制水平。高低调整以低轨(内轨)为基准轨,轨向调整以高轨(外轨)为基准轨。
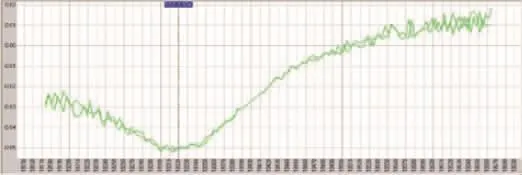
图3 轨道长坡不平顺示意
(3)根据采集的数据对轨道线形进行综合分析和评价,生成各参数波形图,确定需要调整的区段。对于搭接段小于20 m的情况,宜与下一段合并,综合考虑调整量。
(4)制定模拟轨道调整方案,将轨道几何参数调整到允许范围之内,再对模拟调整后波形图进一步检查和优化,确保直线顺直,曲线圆顺,过渡顺畅。一种较为极端的情况是多波不平顺[4],此时仅从数据来看将会得出轨道平顺性良好的虚假结论,从而背离真实情况,因此轨道波形图的检查非常重要。多波不平顺情况如图4所示。
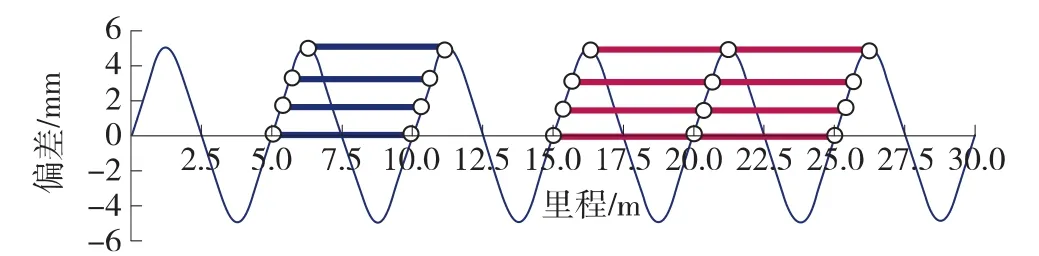
图4 轨道多波不平顺示意
(5)在制定模拟调整方案时,轨距偏差宜按照1~0 mm进行控制;在缓直、直缓点处不得出现反超高;相邻精调作业单元之间重叠区的模拟调整方案应保持一致。
(6)根据模拟调整方案,确定调整部位和扣件规格,形成调整量表。
6 轨道调整及复测
6.1 轨道调整
内业提出轨道模拟调整量表以后,即可开展外业轨道精调工作。轨道调整应遵循以下流程及原则进行。
(1)方案交底:方案制定人员须对精调方案进行详细备注说明,尤其是针对某些困难调整地段及测站间搭接区段的调整方案必须向轨道调整人员解释说明。
(2)校准轨距尺:轨道精调工作,必须确立依靠轨检小车测量轨道几何状态,依靠零级道尺现场作业的指导思想。对于所用到的轨距尺,应进行相互校核,统一基准。对于测量数据不准确的轨距尺,应及时送检。
(3)轨道调整前应先进行调整量的现场标识,然后根据标识情况及每个轨枕处扣件的配件现状确定需要用到的调整件并进行散件。为了保证调整工作的正确进行,还应配置专人对调整量标识及散件情况进行复核。
(4)轨道调整时,一次性松开扣件个数直线段不得大于6个,曲线段不得大于5个。此外在调整平面位置时,将前后各一个扣件松开,以起到钢轨平顺的作用;在调整高程时,将需调整的扣件处前后各两个松开,防止起道机抬起时,钢轨发生硬弯。平面(轨距、轨向)通过更换轨距挡板或绝缘轨距块进行调整,高程(水平、高低)通过更换调高垫片进行调整。
(5)调整完成后,按规定扭力值紧固扣件,然后利用轨距尺进行整改复核。对于调整不到位的扣件,以轨距尺为指导重新调整。
6.2 轨道复测
轨道调整完成后,采用轨检小车对轨道进行复测,复测前同样应先对轨道进行检查,确认扣件安装正确,扣压立力达到设计值。根据复测结果再次进行轨道平顺性分析,对于不满足规范要求的地段,再次进行轨道调整。
7 轨道动态调整
轨道经过静态调整,参考标准各项平顺性指标的合格率达到98%以后,可以进行高速动检。轨道动态检测的手段有:低速轨道检测(≤160 km/h)、高速轨道检测(250~350 km/h)、高速轨道动力学检测(250~350 km/h)。动检车每次检测完毕,均会形成检测报告,包括“轨道三/四级超限报告表”、“轨道二级超限报告表”、“整公里TQI值报告表”、“区段总结报告表”等,根据这些报告表并结合添乘的感受,可以判断出晃车点、轨道平顺性较差的地段。动态检测轨道不平顺性波形图如图5所示。
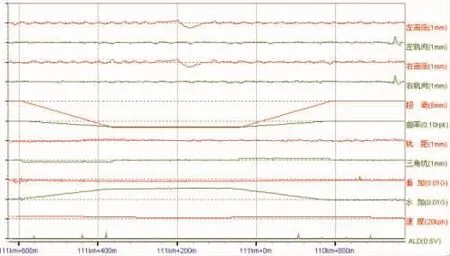
图5 轨道动检不顺性波形
轨道动态检测及时根据动检结果,对明显晃车、平顺性较差的地段进行重点检测调整,对轨道局部缺陷进行修复。在进行数据采集时,应对异常地段前后各延伸一段距离,以此保证轨道调整的延续性。可以看出,轨道动态调整的针对性更强,是轨道线形进一步优化、轮轨关系得到改善的过程,不可缺少。
8 结束语
轨道精调是建设高平顺性轨道的关键环节,技术性强、难度大、要求高。在实施过程中,应当加强对技术人员的培训,使之掌握轨道精调的各个技术环节,吃透技术标准,才能对轨道精调作业流程进行更好的控制;另一方面,轨道精调过程中,已经有运料列车运行,因此还应加强安全防护。高速铁路轨道精调是一个不断探索与学习的过程,本文针对某高速铁路轨道精调的具体实践,较为系统全面地总结了轨道精调的技术要点,给出了一些操作性强的针对措施,值得相关工作者借鉴。
[1] 何华武.无砟轨道技术[M].北京:中国铁道出版社,2005
[2] 朱颖.客运专线无砟轨道铁路工程测量技术[M].北京:中国铁道出版社,2008
[3] TB10601—2009 高速铁路工程测量规范[S]
[4] 王国民,马文静.高速铁路轨道静态精密检测若干技术问题探讨[J].铁道勘察,2010(6):7-10
