小型救援盾构机的刀盘设计研究
2012-05-09叶君剑傅蔡安
叶君剑,傅蔡安
(江南大学机械工程学院,江苏无锡214122)
1 引言
自1825年英国人布鲁诺尔第一次应用盾构法在泰晤士河下开挖隧道以来,学者们就开始对盾构法进行深入的研究。在近190年的历史中,世界各国制造了数以千计的不同类型、不同直径的盾构,盾构机及其施工技术也得到了不断的发展和完善。直至今日,盾构已经发展成为能适应不同地层修建隧道的一种专用工程机械。
近年来,地震等灾害频频发生,造成财产损失不计其数,更有成千上万人在灾害中被掩埋。受灾后,被困人员的救援黄金时间是72h,但目前在这段黄金时间大都采用人工施救或是传统机械挖掘等效率较低的方式,并且这些方式很有可能造成对被救人员的二次伤害和危害施救人员的安全。因此亟需一种高效救援设备以提高救人效率并保证施救人员的安全。联想到盾构机具有内部开挖、挖开的隧道具有自稳性的优点,对盾构机进行机构的创新设计,使之能够运用于地震灾后的救援工作。
2 救援盾构机简介
一般盾构机之所以不适用于灾后的救援,主要原因是过于庞大,不够灵活。灾后救援要求救援设备具有效率高、安全、易运输等特点。灾后的现场条件十分复杂,除了一般盾构机工作时面对的沙石、泥土外,木材、混凝土甚至钢筋都可能出现。因此,所设计的小型救援盾构机必须能够克服这种复杂的地形,准确找到被困人员的位置并将其快速、安全的救出。设计的救援盾构机的简图见图1。
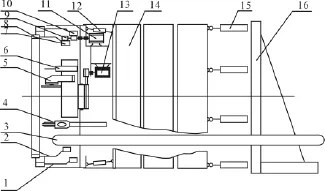
图1 救援盾构机的结构
工作原理为电动机11驱动双向复合刀盘1、2旋转,同时推杆12将刀盘向前推进。刀盘上设置有偏心机构,上面装有切割器5和振捣器6,可对废墟中的各种可能的材料进行切割和破碎,并将切下的混凝土、钢筋和木材等碎块排到刀盘后的空间内,刀盘后方有一机械手4,可将切下的碎料推出盾体填入下方的空隙之中,为盾构机的前进铺路,也可将碎料推往皮带输送机3运出盾构机;盾构在推进过程中,利用推进机构15将环状履带式护管14向前推进,这些护管形成对刚挖掘出的通道的支护,确保安全通道不因外界压力而坍塌。刀盘和护管之间设计有可以实现刀盘小角度调整的并联机构。在盾构前端装有雷达生命探测仪与红外线摄像头等传感器,在暗室或能见度低的环境中,进行细致的搜索,一旦探测到机构前方有被救人员时,机构停止运动,并将刀盘从安全通道的内部进行拆除,此时施救人员进入护套进行人工施救。
3 刀盘的设计
刀盘设计的好坏关系到整个盾构机的成败,而地震后的复杂环境也给救援盾构机的挖掘系统提出了特殊的要求。图2、图3是普通盾构机的两种主流形式的刀盘。由于灾后现场废墟结构不稳定的特性,并且传统的盾构机都是单向旋转的,这样就会传递给废墟很大的扭矩和力从而可能造成废墟结构的改变,造成二次坍塌,对受灾人员和救灾人员都会造成生命威胁。此外,传统的盾构机只能有效的挖掘淤泥、粘土和一些岩石,对于混凝土和钢筋却没有很好的解决方法,而地震灾后现场倒塌的建筑物多为钢筋混凝土结构,同时还混杂着木头、玻璃等物品,所以普通盾构机的挖掘系统不能够满足的需求。为了达到救人的目的,该盾构机还应有容易拆卸的特点,因此在传统的盾构机的基础上根据灾后的复杂环境和救灾的目的,设计出了如图4救灾盾构机的刀盘结构。

图2 面板式刀盘
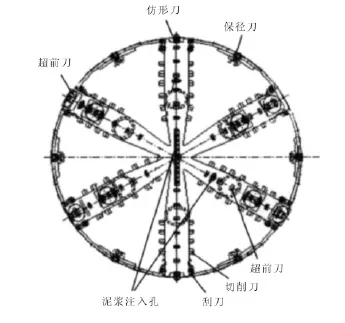
图3 辐条式刀盘
为了尽可能的减少这种由于盾构机的掘进对稳定性的破坏而造成的废墟再次坍塌,采用两个反向同时旋转的刀盘结构,通过刀盘的双向旋转抵消一部分的切削力减少废墟的受力从而减少对废墟结构的破坏。刀盘上装有CBN的刀齿,采用这样的刀具主要考虑到切削混凝土和钢筋需要强度和硬度很高,同时从经济方面考虑,选择了这种刀具,刀齿采用错落排列,这样在刀盘工作时,即使发生意外崩掉少量刀齿也不会影响到刀盘的正常工作。
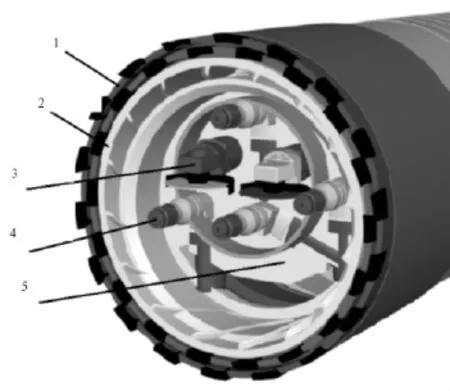
图4 刀盘结构
由于环形刀盘切割下来的是一个大的圆柱形的实体,不太容易被输送出去,为此在刀盘中设置了一个偏心的振捣器,通过振捣器的作用将环形刀盘切割下来的废料捣碎,方便废料通过输送带运送出去。由于混凝土中可能会有钢筋从而导致捣碎不彻底,因此安装了两个切割机,当遇到钢筋时就启动切割机将其切断再进行捣碎。
为了使振捣器和切割机能够到达刀盘内的大部分地方,将刀盘环切下来的废料切削和捣碎达到要求的程度,将振捣器和切割机安装在一个偏心旋转的支架上。当振捣器和切割机无法到达要切割和捣碎的地方时,就启动电动机旋转支架将它们带到合适的位置后,再进行切割和捣碎(图5)。
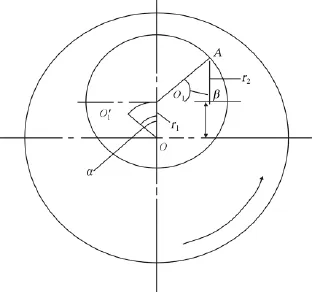
图5 偏心旋转机构示意图

即为A点的运动轨迹。
4 结语
通过对地震后废墟的情况进行分析,结合传统隧道挖掘盾构的特点,提出一种新型的小型救援盾构机,可以适应灾后的复杂地形进行高效、快速、安全的救援。
根据传统盾构的刀盘的特点,对其进行改进,提出了对废墟稳定性影响较小的双层反向切削刀盘。
建立偏心旋转机构的几何模型,对其进行运动位置分析,得出偏心距越大,安装位置越靠近边缘,振捣器和切割机所能到达的范围就越大的结论。
Fong T W,Thorpe C,Baur C.Multi- robot remote driving with collaborative control[J].IEEE Transactions on Industrial Electronics,2003(7):1 ~ 7.
[2]李左芬.盾构施工法的发展历程及展望[J].市政工程国外动态,2000(1):23 ~24.
[3]张忠林,孟庆鑫,王 华.基于转向机构的“穿地龙”机器人运动学研究[J].机器人,2005,27(6):550~554.
[4]宋克志,王本福.常见盾构刀盘型式及选用[J].筑路机械与施工机械化,2007,24(6):1~5.
